一种车辆边缘网络中任务协同卸载方法
1.本发明属于车辆任务卸载技术领域,特别涉及一种车辆边缘网络中任务协同卸载方法。
背景技术:
2.当前时代背景下,智能车辆的出现导致了各种车辆应用程序的出现。这些应用程序通常会产生各种时延敏感性的计算任务,如监测车辆在道路上的位置、分析交通信息等。传统的任务卸载方法不足以支持这些应用的高时效性。在车辆网络系统中,车辆信息被共享,更多的车辆选择合作处理任务。其中不乏很多任务协同卸载的方式,但是它们很难去综合高时效的本地,强计算能力的基站和高移动性的车云之间的负载均衡。随着时间的变化,整个车辆网络的动态性不容被忽略,其中对于车云的构建也产生了很多相关的动态构建问题,在之前的研究中,绝大多数车云是基于静态的车辆去构建并参与任务的卸载,而忽略了具有强大计算资源的动态车辆也可以加入车云的构建中,卸载效率较低。此外,在之前的研究中,车辆的本地处理中心主要是预留给自身的高优先级的任务,但是这样无疑浪费了很多车辆计算资源。
技术实现要素:
3.本发明的目的是提供一种车辆边缘网络中任务协同卸载方法,将本地的计算资源加入到任务的协同卸载中,能够增加车辆群体的可用性,实现高效的任务卸载。
4.本发明提供的技术方案为:
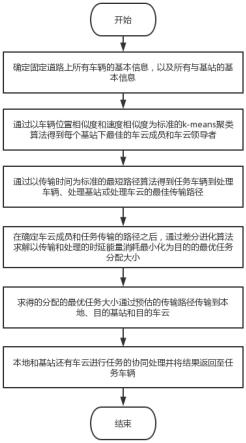
5.一种车辆边缘网络中任务协同卸载方法,包括如下步骤:
6.步骤一、获取当前道路上车辆信息、基站信息以及任务信息;确定当前每个基站下的最佳车云和最佳车云领导者;
7.步骤二、确定任务车辆到处理基站和该基站下的最佳车云领导者的最佳传输路径;
8.其中,所述任务车辆为产生任务的车辆,所述处理基站为所述任务车辆的上属基站;
9.步骤三、分别建立传输和处理时延的计算模型以及传输和处理能量消耗的计算模型;并且以传输和处理时延和能量消耗最小为优化目标,确定分配给最佳车云领导者的任务占比、分配给任务车辆本身的任务占比和分配给处理基站的任务占比;
10.步骤四、根据任务占比分配结果将任务通过最佳传输路径传输到处理基站和最佳车云领导者;最佳车云领导者将任务传输给其他车云成员,所述处理基站将任务传输给其他基站;
11.步骤五、所述车云成员和分配到任务基站分别进行任务处理,并将结果返回至任务车辆。
12.优选的是,在所述步骤一中,通过k-means聚类算法确定每个基站下的最佳车云和
最佳车云领导者,包括如下步骤:
13.步骤1、随机确定k个车辆,作为k个聚类中心;
14.步骤2、计算每个车辆与各聚类中心的综合相似度,并将车辆加入对应最大的综合相似度的聚类中心集群中;
15.步骤3、计算集群所有车辆和作为聚类中心的车辆的平均相似度,以及分别计算所述平均相似度和每个车辆对应的综合相似度的差值,将最小差值对应的车辆作为新的聚类中心,并判断新旧聚类中心是否变化;
16.其中,如果聚类中心不变,则将所述聚类中心作为候选车云领导者,将其对应的集群作为候选车云;如果聚类中心变化,则重新进行步骤2-3;
17.步骤4、计算每个候选车云中的所有车辆与任务车辆的平均相似度,将平均相似度最高的车云作为最佳车云,将所述最佳车云的聚类中心作为最佳车云领导者。
18.优选的是,所述综合相似度的计算方法为:
[0019][0020]
其中,sim
i,k
为车辆与聚类中心的综合相似度,为车辆与聚类中心的位置相似度,为车辆与聚类中心的速度相似度,为车辆与聚类中心的速度方向相似度;β1、β2、β3代表每个相似度所占据的指数比重。
[0021]
优选的是,在所述步骤二中,确定任务车辆到处理基站的最佳路径的方法为:
[0022]
如果任务车辆与处理基站距离较远,不能直接向所述处理基站发送信号,则将与处理基站最近的车辆作为目的车辆,确定任务车辆与所述目的车辆之间的最佳路径后,任务车辆通过最佳路径将信号传递到所述目的车辆,所述目的车辆将信号传递至所述处理基站。
[0023]
优选的是,在所述步骤二中,确定任务车辆到最佳车云领导者的最佳路径的方法为:
[0024]
步骤a、将同一基站下的所有的车辆作为顶点构成集合v,能够直接通信的车辆之间的信道作为边构建有权无向图,两点所连边的权重用两辆车辆的通信时间表示;
[0025]
步骤b、将任务车辆作为源点s,并将点s标记,将所述最佳车云领导者作为目的点t;
[0026]
用点k来表示当前的点s;
[0027]
步骤c、确定所有与点k能够直接通信的点的连线权重,并且在所有能与点k直接通信的点集合j中选择出点j,并将j点标记;
[0028]
其中,已经被标记的点不会再被选择进入集合j;
[0029]
点j满足:d(s,j)=min{d(s,p)}(p∈j);
[0030]
d(s,p)满足:d(s,p)=min{d(s,p),d(s,k)+w(k,p)};
[0031]
式中,w(k,p)表示可直接通信的点k和点p所连边的权重,d(s,k)表示点s和点k之间的当前最短路径所对应的权重之和;d(s,p)表示点s和点p之间的当前最短路径所对应的权重之和;
[0032]
步骤d、点j作为新的点k,重复进行步骤c,直到所有的点被标记;
[0033]
步骤e、取d(s,t)所对应的s到t的路径中的第一个点,记作中继节点m,判断m点是否是目的点t;
[0034]
如果不是,将中继点m加入目标路径,更新任务传至点m之后该有权无向图的状态信息,继而以中继点m作为新的任务车辆重复进行步骤b到步骤e;
[0035]
如果m点是目的点t,则得到目标路径。
[0036]
优选的是,在所述步骤三中,所述传输和处理时延的计算模型为:
[0037][0038]
其中,θ
l,-1
表示任务φ
l
分配给车云的任务占比,θ
l,0
表示任务φ
l
分配给任务车辆即自身的任务占比,θ
l,j
表示任务φ
l
分配给处理基站mj的任务占比;s
l,k
和c
l,k
分别表示任务φ
l
分配给车云γ
l
中的成员车辆vk的任务量和所需的cpu计算能力;s
l
表示任务φ
l
的规模、c
l
表示任务φ
l
所需的cpu计算能力;表示单位任务在基站之间传输所需要的时延;f
l
代表车辆v
l
即自身的cpu计算能力、fj代表基站mj的cpu计算能力、fk代表车云中成员vk的cpu计算能力、代表任务车辆v
l
到其上属基站的通信速率、代表任务车辆v
l
到其所选车云的领导者的通信速率、代表车云领导者v
l
′
到车云成员vk的通信速率,j
max
表示当前道路上基站的数量。
[0039]
优选的是,在所述步骤三中,所述传输和处理能量消耗的计算模型为:
[0040][0041]
其中,θ
l,-1
表示任务φ
l
分配给车云的任务占比,θ
l,0
表示任务φ
l
分配给本地的任务占比,θ
l,j
表示任务φ
l
分配给基站mj的任务占比;表示单位任务在基站之间传输所产生的能量消耗,ξ
l
和χ
l
表示任务车辆即自身与cpu相关的两个系数,ξk和χk表示车云成员车辆与其自身cpu相关的两个系数,和表示基站mj其自身cpu相关的系数;s
l,k
和c
l,k
分别表示任务φ
l
分配给车云γ
l
中的成员车辆vk的任务量和所需的cpu计算能力;p
l
表示车辆v
l
的传输功率,p
l
′
表示车云领导者v
l
′
的传输功率。
[0042]
优选的是,在所述步骤三中,采用差分进化算法通过交叉遗传多次迭代得到分配给该任务对应的最佳车云的任务占比、分配给任务车辆本身的任务占比和分配给各处理基站的任务占比。
[0043]
本发明的有益效果是:
[0044]
本发明提供的车辆边缘网络中任务协同卸载方法,将本地的计算资源加入到任务的协同卸载中,能够增加车辆群体的可用性,实现高效的任务卸载;并且能够减少各种任务传输所带来的时延和能耗,增加整个车辆系统的信息资源共享。
附图说明
[0045]
图1为本发明所述的车辆任务协同卸载过程的示意图。
[0046]
图2为本发明所述的车辆边缘网络中任务协同卸载方法的流程图。
[0047]
图3为本发明所述的最佳车云及最佳车云领导者选择的流程图。
[0048]
图4为本发明所述的确定最佳传输路径的流程图。
[0049]
图5为本发明所述的通过差分进化算法得到任务占比的流程图。
具体实施方式
[0050]
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
[0051]
在实际生活中,车辆在道路上行驶,可能会产生各种各样的任务,当车辆自身的计算中心(cpu)繁忙的时候,就可以将任务交由其他车辆或者基站去处理。由于一个车辆去处理这个任务可能并不是特别快,因此本发明中考虑让一群车辆、基站和产生任务的车辆进行协同处理。但是如果这群车辆随意的选择,可能会导致时延变大或者能耗变高,得不偿失,因此,在本发明中将具有一些相同特性的车辆分为一类,让他们构成车云去处理任务。
[0052]
本发明提供了一种车辆边缘网络中任务协同卸载方法。当一个车辆产生任务,车辆通知其上属基站,其上属基站会为其通过k-means算法选择出一些车辆作为车云,并确定其车云领导者,任务车辆得知基站发送的消息之后,将任务通过最佳传输路径传送个对应的最佳车云领导者,最佳车云领导者根据车云成员的空闲资源去分配任务,按照分配的结果将任务传输给车云成员。此外,还可以将任务通过最佳传输路径传输至任务车辆的上属基站进行处理,该上属基站也可以将任务传输给其他基站进行任务的协同处理。至于任务处理完成之后结果的返回,因为任务的处理结果一般来说是比较小的,所以时间和能耗也较小,可忽略不计。
[0053]
如图1-2所示,本发明提供的车辆边缘网络中任务协同卸载方法,具体实施过程如下。
[0054]
获取当前道路上所有车辆的基本信息{li,vi,φi,fi},分别表示车辆vi的位置坐标、速度、任务信息和车辆cpu所能提供的计算能力;获取所有基站的基本信息分别表示基站mj的cpu所能提供的计算能力、位置坐标和通信范围;以及获取所有任务的基本信息{s
l
,t
l
,c
l
},来分别表示任务φ
l
的规模、所能容忍的最大时延和任务所需的cpu计算能力。之后,确定每个基站下的最佳车云(成员)和最佳车云领导者。
[0055]
在本实施例中,通过以车辆位置相似度速度(大小)相似度和速度方向相似度的综合相似度sim
i,k
为标准的k-means聚类算法得到每个基站下最佳的车云成员和车云领导者。如图3所示,具体过程包括:
[0056]
(1)随机确定k个车辆,作为k个聚类中心;
[0057]
(2)计算每个车辆与各聚类中心的综合相似度,并将车辆加入对应最大的综合相似度的聚类中心集群中;
[0058]
(3)计算集群所有车辆和作为聚类中心的车辆的平均相似度,以及分别计算所述
平均相似度和每个车辆对应的综合相似度的差值,将最小差值对应的车辆作为新的聚类中心,并判断新旧聚类中心是否变化;
[0059]
其中,如果聚类中心不变,则将所述聚类中心作为候选车云领导者,将其对应的集群作为候选车云;如果聚类中心变化,则重新进行步骤(2)-(3);
[0060]
(4)计算每个候选车云中的所有车辆与任务车辆的平均相似度,将平均相似度最高的车云作为最佳车云,将所述最佳车云的聚类中心作为最佳车云领导者。
[0061]
综合相似度sim
i,k
的计算方法如下:
[0062][0063]
其中,为位置相似度,为速度相似度,为速度方向相似度;
[0064][0065][0066][0067][0068][0069]
其中,β1、β2、β3代表每个相似度所占据的指数比重,各个比重可以根据当时道路上的车辆的密集程度来确定,当道路上的车辆较为密集的时候相对应速度的相似度会较高,则我们需要将位置相似度的指数β1设置较高些,反之则将β1、β2、β3设置均衡,dis
i,k
表示vi和vk的欧氏距离,表示mj下的所有车辆集合。(xi,yi)和(xk,yk)表示车辆vi和vk的位置坐标,vi和vk表示车辆vi和vk的速度矢量,|vi|的值为速度矢量vi的大小。其中,β1、β2、β3的取值范围均为(0,1)即β1、β2、β3∈(0,1)。
[0070]
确定任务车辆到处理基站和该基站下的最佳车云领导者的最佳传输路径。如果任务车辆能直接向处理基站(任务车辆的上属基站)传输信息,则直接将任务传递给处理基站。如果任务车辆与处理基站(任务车辆的上属基站)距离较远,不能直接向处理基站传输信息,则将与处理基站最近的车辆作为目的车辆,确定任务车辆与所述目的车辆之间的最佳路径后,任务车辆通过最佳路径将信号传递到所述目的车辆,所述目的车辆将信号传递至所述处理基站。
[0071]
在本实施例中,通过以传输时间为权重w
a,b
的最短路径算法得到所述目的车辆或最佳车云领导者的最佳传输路径。
[0072]
如图4所示,确定最佳传输路径的过程为:
[0073]
步骤a、将同一基站下的所有的车辆作为顶点构成集合v,能够直接通信的车辆之间的信道作为边构建有权无向图,两点所连边的权重用两辆车辆的通信时间表示;
[0074]
步骤b、将任务车辆作为源点s,并将s点标记,将所述最佳车云领导者作为目的点
t;
[0075]
用点k来表示当前的点s;
[0076]
步骤c、确定所有与点k能够直接通信的点的连线权重,并且在所有能与点k直接通信的点集合j中选择出点j,并将j点标记;
[0077]
其中,已经被标记的点不会再被选择进入集合j;点j满足:d(s,j)=min{d(s,p)}(p∈j);
[0078]
d(s,p)满足:d(s,p)=min{d(s,p),d(s,k)+w(k,p)};
[0079]
式中,w(k,p)表示可直接通信的点k和点p所连边的权重,d(s,k)表示无可直接通信限制的点s和点k之间的当前最短路径所对应的权重之和;d(s,p)表示点s和点p之间的当前最短路径所对应的权重之和。
[0080]
初始规定:d(a,b)=+∞(a∈v,b∈v,a≠b),d(a,a)=0(a∈v),w(a,b)为a、b两点所连边的权重,且a,b为图中任意两点。
[0081]
步骤d、点j作为新的点k,重复进行步骤c,直到所有的点被标记;
[0082]
步骤e、取d(s,t)所对应的s到t的路径中的第一个点,记作中继节点m,判断m点是否是目的点t;
[0083]
如果不是,将中继点m加入目标路径,更新任务传至点m之后该有权无向图的状态信息,继而以中继点m作为新的任务车辆重复进行步骤b到步骤e;
[0084]
如果m点是目的点t,则可以得到目标路径。
[0085]
两个基础设施可通信不失真的最大距离为γ0表示信号传输不失真的信干噪比阈值。
[0086][0087][0088]
在任务传输的最佳路径之后,通过差分进化算法求解以任务φ
l
传输和处理的时延∑
l∈φ
t
l
能量消耗∑
l∈φel
最小化为目的的最优任务分配比重θ
l
。
[0089][0090]
[0091][0092][0093][0094]
其中,θ
l,-1
表示任务φ
l
分配给车云的任务占比,θ
l,0
表示任务φ
l
分配给本地的任务占比,θ
l,j
表示任务φ
l
分配给基站mj的任务占比。在计算发送端和接收端的任务传输速率r
i,j
的时候根据香农定理我们需要先求的传输的过程中的信干噪比(sinr)γ
i,j
。其中b
i,j
表示发送方和接受方的信道带宽,pi表示发送方的发射功率,h
i,j
表示发送方和接收方之间的信道增益,c表示光速,g
i,j
表示发送方的载波频率,d
i,j
表示发送方和接受方的欧式距离,τ表示与路径相关的损失系数,αk
i,jzi,jbi,j
表示环境噪音功率,α表示玻尔兹曼常数,k
i,j
表示接收方的相关开氏温度,z
i,j
表示接收方的噪音指数,表示由其他车辆所产生的信号干扰功率。
[0095]
继而计算所对应的单个任务φ
l
所产生的时延t
l
和能量消耗e
l
,其中表示单位任务在基站之间传输所需要的时延,表示单位任务在基站之间传输所产生的能量消耗,ξ
l
和χ
l
表示和处理中心的cpu相关的两个系数。其中s
l,k
和c
l,k
分别表示任务φ
l
分配给车云γ
l
中的成员车辆vk的任务量和所需的cpu计算能力。在求得解空间下某一解对应的时延的时候,由于分配后的任务可以并行发送,因此求得分配给各个处理中心的时延的最大值表示任务φ
l
的时延,而在求解能量消耗的时候需要求得各个传输和处理所产生的能量之和。根据时延∑
l∈φ
t
l
和能量消耗∑
l∈φel
两个目标函数的最小化为收敛条件,采用差分进化算法通过交叉遗传多次迭代到最优解。
[0096]
如图5所示,差分进化算法的流程为:
[0097]
(1)随机初始化n组任务分配策略构成一个初始化种群x,每组策略为一个单独的个体规定变异因子s和交叉概率因子k;
[0098]
(2)初始化v种群,v=x,更新v中的每个个体vi=v
l
+s
×
(v
m-vn)(v
l
,vm,vn随机选取,且l,m,n≠i);
[0099]
(3)对于v种群中的所有个体的每一组基因,给与随机值,与交叉概率因子相比,如
果给与的随机值比k大,则将v种群的该基因组用x种群的基因组替换,反之则不变;
[0100]
(4)计算v种群和x种群的适应度函数,即计算v种群和x种群中对应的每个个体即策略所对应的处理时延和能量消耗。处理时延和能量消耗通过线性加权求得每个种群中每个个体的综合消耗。比较x种群和v种群的所有个体的综合消耗之和,选择综合消耗最低的种群作为新的x种群;
[0101]
(5)判断新旧x种群的综合消耗差值是否小于阈值,如果小于阈值则转至(6),反之则转至(2);
[0102]
(6)计算x种群中每个个体的综合消耗,将对应综合消耗最小的个体作为最佳任务分配策略。
[0103]
根据任务占比分配结果将任务通过最佳传输路径传输到处理基站和最佳车云领导者;最佳车云领导者将任务传输给其他车云成员,所述处理基站将任务传输给其他基站;
[0104]
所述车云成员和分配到任务基站分别进行任务处理,并将结果返回至任务车辆。
[0105]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1