一种车载鱼眼相机FOV测试方法与流程
一种车载鱼眼相机fov测试方法
技术领域
1.本发明涉及车载相机测试技术领域,尤其涉及一种车载鱼眼相机fov测试方法。
背景技术:
2.随着人工智能的进步,智能驾驶技术得以急速发展,车载鱼眼相机的应用也是随之增加,基础倒车影像、360环视等都是基于车载鱼眼相机开发实现功能,部分智能驾驶车装有甚至多达10几个鱼眼相机,因此,一种简单实用的车载鱼眼相机fov测试是急需发明的。常见的车载鱼眼相机fov测试方法有基于matlab的软件方法测试以及一些专业相机制造企业的使用指定价格高昂的测试设备进行测试,对于使用matlab软件方法进行测试,其专业性太强,需要较高的理论知识储备和相应的编程调试能力,以及专业的采图技巧。
3.现有技术基于matlab的软件测试方法,也是一种较为常见的理论测试方法,其特点在于,使用相机标定中的内外参数进行反推计算得到fov大小,但是,其需要有相关算法库以及算法理解和掌握能力,此外,采集原始照片需要相当高的技巧,采集的次数较多,计算很复杂。现有的相机制造企业的专业检测设备,测量相对简单,但其设备成本高昂、需要指定的实验室环境,不方便携带等。
技术实现要素:
4.本发明所要解决的技术问题是,提供一种车载鱼眼相机fov测试方法,以相对较低的成本,能够准确且快速地进行车载鱼眼相机的fov测试,为车载鱼眼相机的fov测试提供一种更直观、高效的测试方法是现有技术需要解决的问题。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种车载鱼眼相机fov测试方法,测试方法为通过视频采集卡确认待测鱼眼相机fov的边缘位置,然后计算得到fov数值,方法包括:
7.布置合适的场地,准备和待测试车载相机匹配的视频采集卡;
8.将车载鱼眼相机固定在场地的中央位置,点亮相机、启动视频采集,确保上位机可以采集到成像视频;
9.移动标记物,使其恰好出现在成像视频的垂直方向中间、水平方向左侧的最边缘位置,即左侧居中的最左侧位置,找到左侧边界点p1;同理,找到p2;
10.由p1、p2可以测量得到d1、d2,统计d1、d2,根据fov计算公式计算可得b1、b2;
11.进而,可以得到待测相机的fov:∠a=180
°‑
∠b1-∠b2;
12.若确定待测相机模组完全对称,或者测试场地空间不够大,可以将待测相机放在一侧,启用单侧测试模式,测试一侧的夹角b,可以计算得到待测相机的fov:∠a=180
°‑
2*∠b。
13.作为上述技术方案的进一步描述:
14.所述的待测鱼眼相机单体需要有适配的电源供电,保证其可以正常工作。
15.作为上述技术方案的进一步描述:
16.所述的测试方法需要在5-20米空旷的测试场地进行。
17.作为上述技术方案的进一步描述:
18.所述的视频采集卡为与待测试鱼眼相机视频格式匹配的采集卡。
19.作为上述技术方案的进一步描述:
20.所述的视频采集卡可以在上位机显示鱼眼相机所成像的视频信息。
21.作为上述技术方案的进一步描述:
22.所述的待测试鱼眼相机放在测试台中心。
23.作为上述技术方案的进一步描述:
24.所述的测试台要水平放置于测试场地,且位于测试场地的正中心位置。
25.作为上述技术方案的进一步描述:
26.所述的鱼眼相机fov的边缘位置确认,是通过视频采集卡观察成像坐标系中的边缘位置确认鱼眼相机fov的物理坐标系边界所在。
27.作为上述技术方案的进一步描述:
28.所述的观察由人工移动相对障碍物颜色明显的标记物,直至其恰好出现在上位机显示视频的图像边界位置为止,并且标记该物理位置边界点为p1、p2。
29.作为上述技术方案的进一步描述:
30.所述的fov计算方法如下:
31.假设相机到两侧障碍物的距离分别为d1、d2,物理坐标系中两侧边界点到鱼眼相机镜头水平面的距离分别为d1、d2,两侧成像光束与镜头水平面的夹角分别为b1和b2,则鱼眼相机的fov夹角为:∠a=180
°‑
∠b1-∠b2;
32.其中,当侧边的边界点位于镜头水平面的后/上方时,定义:d1《0、d2《0,反之,则其均为正数;-90
°
≤b1≤90
°
、-90
°
≤b2≤90
°
;
33.d1、d1与b1的关系如下:tanb1=d1/d1。
34.综上所述的,由于采用了上述技术方案,本发明的有益效果是:
35.1、本发明中,可以快捷、简单地进行车载鱼眼相机的fov测试。
36.2、本发明中,无需价格较高的采集数据设备和严格的实验室环境,极大程度上降低了测试的成本、节约项目成本。
37.3、本发明中,本测试方法可读性强,易上手。
附图说明
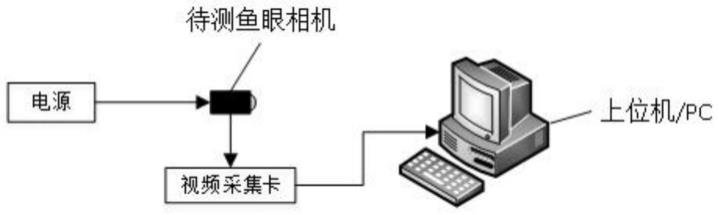
38.图1为本发明一种车载鱼眼相机fov测试方法的方案框图;
39.图2为本发明一种车载鱼眼相机fov测试方法的测试场地示意图;
40.图3为本发明一种车载鱼眼相机fov测试方法的fov计算原理图;
41.图4为本发明一种车载鱼眼相机fov测试方法的性能指标查询表。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它
实施例,都属于本发明保护的范围。
43.请参阅图1-4,本发明提供一种技术方案:一种车载鱼眼相机fov测试方法,测试方法为通过视频采集卡确认待测鱼眼相机fov的边缘位置,然后计算得到fov数值,方法包括:
44.step1:参考图1、图2和图3布置合适的场地,准备和待测试车载相机匹配的视频采集卡;
45.step2:需要在5-20米空旷的测试场地进行(10米的场地作为单侧测试、20米的场地作为双侧测试),推荐10米的空旷测试场地,将测试台要水平放置于测试场地,且位于测试场地的正中心位置,将待测试鱼眼相机放在测试台中心,并且将车载鱼眼相机固定在场地的中央位置,点亮相机、启动视频采集,确保上位机可以采集到成像视频;
46.step3:移动标记物,使其恰好出现在成像视频的垂直方向中间、水平方向左侧的最边缘位置,即左侧居中的最左侧位置,找到左侧边界点p1;同理,找到p2;
47.step4:由p1、p2可以测量得到d1、d2,统计d1、d2,根据fov计算公式计算可得b1、b2;
48.step5:进而,可以得到待测相机的fov:∠a=180
°‑
∠b1-∠b2;
49.若确定待测相机模组完全对称,或者测试场地空间不够大,可以将待测相机放在一侧,启用单侧测试模式,测试一侧的夹角b,可以计算得到待测相机的fov:∠a=180
°‑
2*∠b;
50.fov计算方法如下:
51.假设相机到两侧障碍物的距离分别为d1、d2,物理坐标系中两侧边界点到鱼眼相机镜头水平面的距离分别为d1、d2,两侧成像光束与镜头水平面的夹角分别为b1和b2,则鱼眼相机的fov夹角为:∠a=180
°‑
∠b1-∠b2;
52.其中,当侧边的边界点位于镜头水平面的后/上方时,定义:d1《0、d2《0,反之,则其均为正数;-90
°
≤b1≤90
°
、-90
°
≤b2≤90
°
;
53.d1、d1与b1的关系如下:tanb1=d1/d1。
54.具体的,待测鱼眼相机单体需要有适配的电源供电,保证其可以正常工作。
55.视频采集卡为与待测试鱼眼相机视频格式匹配的采集卡。
56.视频采集卡可以在上位机显示鱼眼相机所成像的视频信息。
57.鱼眼相机fov的边缘位置确认,是通过视频采集卡观察成像坐标系中的边缘位置确认鱼眼相机fov的物理坐标系边界所在。
58.观察由人工移动相对障碍物颜色明显的标记物,直至其恰好出现在上位机显示视频的图像边界位置为止,并且标记该物理位置边界点为p1、p2。
59.具体的,图4为使用上述一种车载鱼眼相机fov测试方法所得到的性能指标查询表,其中共设置了14组d1/d2初始数值(分别为1、2、3、4、5、6、7、8、9、10、20、30、40和50),并设置了三组试验对象,其中三组试验对象的d1/d2的初始数值分别为0.001、0.01和0.1,通过42组试验数据可得:
60.采用本技术的一种车载鱼眼相机fov测试方法,其相较于matlab的软件方法测试更加快捷、简单,不需要较高测试硬件条件,同时测试数据精度方面足以满足实际车载鱼眼相机fov测试需求。
61.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于
此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1