摄像模组及电子设备的制作方法
1.本技术属于电子技术领域,具体涉及一种摄像模组及电子设备。
背景技术:
2.现有光学防抖(optical image stabilizer,ois)马达主要采用滚珠式、弹片式、悬丝式以及sensor-shift(芯片平移)ois。这些ois马达如果要同时实现三轴防抖以及对焦功能,磁石线圈等部件占用的尺寸庞大、磁干扰问题严重,导致实际应用困难。
3.形状记忆合金(shape memory alloys,sma)ois马达是目前较新型的可行性高的已量产方案,能够完全解决磁干扰、大幅减小尺寸、解决撞击异响等一些电磁驱动马达难以根治的问题,但它也存在sma技术固有的一些缺陷:可靠性实验后sma疲劳断裂、高温下精度差等问题。如果用sma来同时实现三轴防抖以及对焦功能,设计难度和成本都相当高。
4.现有摄像模组的防抖方案一般存在如下问题:长宽尺寸大,现有的能同时实现对焦与防抖的模组,要用到复杂的驱动结构,庞大的长宽尺寸限制了整机应用。现有的电磁式sensor-shift马达需要在芯片四周设置磁石、线圈,这是导致长宽尺寸难压缩的主要原因。对焦组件的空间利用率低,对焦部件如果设在长/宽方向,就会进一步加大长/宽,如果设在ois组件的高度方向(顶部),可以减小长宽但增加了高度,ois马达顶部的空间难以利用,马达内部空间利用远远没有极致化。磁干扰严重,对于要求三轴ois+af(auto focusing,自动对焦)的纯电磁式马达,磁石数量多、并且磁石大多布置在马达侧壁,多个组件之间的磁干扰、马达与其它模组之间的磁干扰严重,这严重限制了此类电磁式马达的实际设计,因此尺寸限制极为苛刻。撞击/摩擦疲劳产尘导致成像脏污黑团,现有ois马达内部塑料之间的撞击疲劳产生碎屑问题难以根治。撞击异响问题,现有ois马达多数采用滚珠式,存在撞击异响问题。出线btb(board to board connector,板对板连接器)合并困难,由于感光芯片的线路板、ois组件线路板、af组件线路板各自分离,而且两轴运动会使fpc(flexible printed circuit,柔性印刷电路板)产生极大扭矩、限制了fpc宽度和走向,实际设计时往往需要用多个btb出线,难以合并。
技术实现要素:
5.本技术旨在提供一种摄像模组及电子设备,能够解决现有技术中摄像模组的防抖结构尺寸较大以及防抖效果不佳的问题。
6.为了解决上述技术问题,本技术是这样实现的:
7.第一方面,本技术实施例提出了一种摄像模组,包括:壳体、载体、镜头组件、弹性电路板、感光芯片组件、第一驱动组件以及第一柔性电路板;
8.所述壳体设有容置空间,所述壳体具有相对的第一侧和第二侧,所述第一侧设有第一通孔,所述第二侧设有第二通孔,所述载体设于所述容置空间内,所述镜头组件设于所述载体,且外露于所述第一通孔;
9.所述第一柔性电路板设有第三通孔,所述感光芯片组件通过所述弹性电路板设于
所述第三通孔内,且所述感光芯片组件通过所述弹性电路板与所述第一柔性电路板电连接;所述第一柔性电路板盖设于所述第二通孔,所述载体朝向所述感光芯片组件的一侧通过所述第一驱动组件与所述感光芯片组件连接,所述第一驱动组件对所述感光芯片组件产生作用力,以使所述感光芯片组件相对于所述第一柔性电路板移动;
10.其中,所述第一驱动组件对所述感光芯片组件产生的所述作用力的作用方向相对于所述第一柔性电路板所在平面倾斜设置。
11.第二方面,本技术实施例提出了一种电子设备,包括:上述的摄像模组。
12.在本技术的实施例中,第一驱动组件对感光芯片组件产生的作用力的作用方向相对于第一柔性电路板所在平面倾斜设置,并且,作用力的方向可以朝向或背离感光芯片组件,感光芯片组件在作用力的驱动下能够相对第一柔性电路板发生移动,从而实现翻滚轴防抖、领航轴防抖和对焦。也就是说,摄像模组能够同时实现防抖以及对焦功能,能够提升空间利用率。
13.本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
14.本技术的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
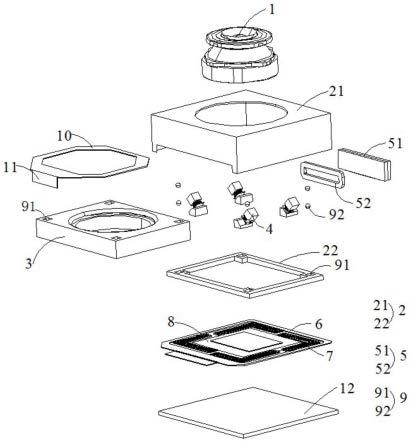
15.图1是根据本技术实施例的摄像模组的爆炸结构示意图;
16.图2是根据本技术实施例的电子设备的结构示意图;
17.图3是根据本技术实施例的电子设备的局部结构示意图之一;
18.图4是根据本技术实施例的电子设备的局部结构示意图之二;
19.图5是根据本技术实施例的第一驱动组件的结构示意图;
20.图6是根据本技术实施例的电子设备的局部结构示意图之三;
21.图7是根据本技术实施例的第一驱动组件的工作示意图之一;
22.图8是根据本技术实施例的第一驱动组件的工作示意图之二;
23.图9是根据本技术实施例的第一驱动组件的工作示意图之三。
24.附图标记:
25.1、镜头组件;2、壳体;21、外壳;22、承台;3、载体;4、第一驱动组件;41、电磁铁;42、第一磁性件;5、第二驱动组件;51、第二磁性件;52、线圈;6、第一柔性电路板;7、弹性电路板;8、感光芯片组件;9、滑动组件;91、导向槽;92、滚珠;10、导电件;11、第二柔性电路板;12、底座。
具体实施方式
26.下面将详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
27.在本技术的描述中,需要理解的是,术语“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
28.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
29.如图1和图2所示,本技术实施例的摄像模组,包括:壳体2、载体3、镜头组件1、弹性电路板7、感光芯片组件8、第一驱动组件4以及第一柔性电路板6。
30.其中,绕镜头光轴旋转称为翻滚(roll)轴防抖,以及,镜头/芯片旋转方向与fpc出线方向垂直的旋转运动称为领航(yaw)轴防抖。
31.壳体2设有容置空间,壳体2具有相对的第一侧和第二侧,第一侧设有第一通孔,第一通孔可以为圆孔,第二侧设有第二通孔,第二通孔可以为矩形孔,载体3滑动设于容置空间内,载体3可以为矩形结构件,载体3设有放置位,镜头组件1设于放置位上,例如,载体3设有环形凹槽,镜头组件1装配于环形凹槽上,从而确保镜头组件1的稳定性。在镜头组件1设于放置位上的情况下,镜头组件1外露于第一通孔。
32.第一柔性电路板6设有第三通孔,感光芯片组件8通过弹性电路板7设于第三通孔内,且感光芯片组件8通过弹性电路板7与第一柔性电路板6电连接。
33.例如,第一柔性电路板6的中心位置处设置有矩形通孔,感光芯片组件8位于矩形通孔处,且第一柔性电路板6与感光芯片组件8之间留有间隙,弹性电路板7位于间隙处,用于连接第一柔性电路板6与感光芯片组件8。
34.第一柔性电路板6盖设于第二通孔,载体3朝向感光芯片组件8的一侧通过第二驱动组件5与感光芯片组件8连接,第二驱动组件5对感光芯片组件8产生作用力,以使感光芯片组件8相对于第一柔性电路板6移动。
35.其中,第一驱动组件4对感光芯片组件8产生的作用力的作用方向相对于第一柔性电路板6所在平面倾斜设置。
36.在本技术实施例中,第一驱动组件4对感光芯片组件8产生的作用力的作用方向相对于第一柔性电路板6所在平面倾斜设置,并且,作用力的方向可以朝向或背离感光芯片组件8,感光芯片组件8在作用力的驱动下能够相对第一柔性电路板6发生移动,从而实现翻滚轴防抖、领航轴防抖和对焦。也就是说,摄像模组能够同时实现防抖以及对焦功能,能够提升空间利用率。
37.在可选的实施例中,如图1、图4和图5所示,第一驱动组件4包括电磁铁41和第一磁性件42,电磁铁41和第一磁性件42中的一者设于载体3朝向感光芯片组件8的一侧,另一者设于感光芯片组件8。
38.例如,电磁铁41设于载体3朝向感光芯片组件8的一侧,第一磁性件42设于感光芯片组件8面向载体3的一侧。
39.电磁铁41的磁分界面相对第一柔性电路板6所在平面倾斜设置,第一磁性件42的磁分界面相对于感光芯片组件8所在平面倾斜设置。
40.其中,当在空间的某些位置上,顺时针、逆时针的磁场强度在某一分量上相互抵
消,则二者磁力线会汇聚成一条线,即磁分界面。
41.在本技术实施例中,电磁铁41与第一磁性件42产生的磁斥力或磁吸力作用方向能够相对于第一柔性电路板6所在平面呈夹角设置,从而能够实现翻滚轴防抖、领航轴防抖以及对焦功能。
42.需要说明的是,电磁铁41包括铁芯和线圈,铁芯可以与载体3一体注塑成型。
43.在可选的实施例中,第一驱动组件4还包括霍尔传感器,在第一磁性件42设于感光芯片组件8的情况下,霍尔传感器用于获取第一磁性件42相对第一柔性电路板6的位置。
44.本技术实施例中,由于第一磁性件42设置在感光芯片组件8上,因此,在感光芯片组件8的移动过程中,第一磁性件42会随着感光芯片组件8一起移动,随着感光芯片组件8的位置变化,霍尔传感器检测到的磁场强度也会随之变化,因此本技术实施例中,通过霍尔传感器检测到的磁场强度可以反映感光芯片组件8的位置。
45.其中,霍尔传感器是根据霍尔效应制作的一种磁场传感器,具有体积小精度高、线性度好等特点。霍尔传感器可以分为线型霍尔传感器和开关型霍尔传感器,其中,线型霍尔传感器主要包括霍尔元件、线性放大器和射极跟随器,开关型霍尔传感器主要包括霍尔元件、差分放大器、稳压器、触发器以及输出级。
46.在可选的实施例中,如图6所示,在第一磁性件42设于感光芯片组件8的情况下,第一磁性件42面向电磁铁41的一侧设置有斜面,斜面相对于感光芯片组件8所在平面倾斜设置。
47.需要说明的是,斜面与感光芯片组件8所在的平面呈45
°
,此时便于对第一磁性件42充磁。
48.其中,电磁铁41的铁芯具有抵接部,抵接部能够与斜面相贴合。
49.在可选的实施例中,第一驱动组件4的数量为多个,多个第一驱动组件4沿第二通孔的中心轴线依次布置。
50.例如,四个第一驱动组件4沿第二通孔的中心轴线依次均匀布置。
51.感光芯片组件8的姿态共有六个自由度:(x,y,z,pitch,yaw,roll),考虑到不可能通过仅仅四个第一驱动组件4实现六轴控制,因此必须放弃两个自由度,否则将导致控制方程组无解。
52.根据本技术实施例的物理结构,可将x平移与yaw旋转这两个运动合并,因为它们对于ois的作用是相同的,相当于shift-ois与tilt-ois的叠加;另外将pitch旋转轴从防抖系统中剔除,将其改用lens shift实现并单独控制,第二驱动组件5的摆放方向和感光芯片组件8的设计决定了芯片的pitch=0、y=0。
53.剩余4个轴的数值(x_yaw,y,z,roll)与4个第二驱动组件5的推/拉力(a,b,c,d)可以建立方程组:(为简化形式,以下方程均不考虑具体单位)
[0054][0055]
假如把x与yaw分开独立控制,将导致以上方程系数矩阵扩充到4*4,经计算确认无解。
[0056]
必须把x与yaw通过光学系统结构进行换算,使两者合并为一个变量才能实现3个自由度独立控制。
[0057]
以上方程系数矩阵的秩=3,小于变量数4,方程对(roll,x_yaw,z)的任意值都有解,解的数量有无穷多个;因此本技术实施例可以实现三个自由度同时独立控制,并且根据具体调试情况还可能有简化的空间。
[0058]
如图4、图7、图8和图9所示,roll轴旋转:四个第一驱动组件4以两条对角线分为两组,也就是说,一条对角线上的两个第一驱动组件4为一组,其中一组第一驱动组件4通同向电流、另一组第一驱动组件4通反向电流,可以抵消pitch、yaw扭矩并实现roll-ois。
[0059]
yaw轴旋转:四个第一驱动组件4中,同向的两个第一驱动组件4划为一组,也就是说,作用力的作用方向相对于感光芯片组件8所在平面呈相同夹角的两个第一驱动组件4划为一组,两组各通不同方向的电流,可以抵消roll扭矩并实现yaw-ois。
[0060]
芯片对焦:四个第一驱动组件4全部通同向电流,可以实现芯片对焦。
[0061]
在可选的实施例中,如图1所示,摄像模组还包括第二驱动组件5,载体3滑动设于容置空间内,载体3通过第二驱动组件5与壳体2连接,在第二驱动组件5的作用下,载体3能够相对壳体2移动。
[0062]
需要说明的是,镜头/芯片旋转方向与fpc出线方向平行的旋转运动称为俯仰轴(pitch)防抖。
[0063]
载体3通过第一驱动组件4与壳体2连接,在第一驱动组件4的作用下,载体3能够相对壳体2移动,也就是说,载体3能够相对壳体2沿第一方向移动,从而实现俯仰轴防抖。
[0064]
在本技术实施例中,根据摄像模组的工况,在第二驱动组件5的作用下,能够调整作用力的方向,从而实现翻滚轴防抖、领航轴防抖和对焦,在第一驱动组件4的作用下实现俯仰轴防抖,也就是说,摄像模组能够同时实现三轴防抖以及对焦功能。
[0065]
在可选的实施例中,如图1、图3和图4所示,第二驱动组件5包括线圈52和第二磁性件51,线圈52设置于载体3的一侧,第二磁性件51设置于壳体2的内壁,线圈52和第二磁性件51相对布置。
[0066]
需要说明的是,在对线圈52供电的情况下,线圈52和第二磁性件51之间能够产生磁吸力和磁斥力,从而驱动载体3相对壳体2移动,也就是说,载体3能够相对壳体2沿第一方向移动,从而实现俯仰轴防抖。
[0067]
其中,为了便于布置线圈52,载体3的一侧设置有凸起部,线圈52沿凸起部的周向方向布置。
[0068]
在可选的实施例中,如图1和图3所示,摄像模组还包括导电件10和第二柔性电路板11,导电件10嵌设于载体3,第一驱动组件4和第二驱动组件5均与导电件10电连接。
[0069]
其中,导电件10通过第二柔性电路板11与第一柔性电路板6电连接。
[0070]
需要说明的是,电磁铁41、线圈52以及霍尔传感器中的至少一者均可以与导电件10连接。例如,电磁铁41、线圈52以及霍尔传感器均与导电件10连接。
[0071]
在可选的实施例中,如图1、图3和图4所示,摄像模组还包括滑动组件9,滑动组件9包括导向槽91和滚珠92,壳体2和载体3朝向感光芯片组件8的一侧之间设有导向槽91,滚珠92活动设于导向槽91内。
[0072]
其中,导向槽91包括第一部分和第二部分。
[0073]
如图1和图2所示,壳体2包括外壳21和承台22,外壳21上设有第一通孔,承台22设有第二通孔,也就是说,承台22上设有第一部分,载体3朝向感光芯片组件8的一侧设有第二
部分。
[0074]
特别需要指出的是,为了载体3的移动的稳定性,承台22的四个顶角处均设置有第一部分,而载体3朝向感光芯片组件8的一侧设有四个第二部分。
[0075]
此外,外壳21和载体3朝向外壳21的一侧之间也设有导向槽91,滚珠92活动设于导向槽91内。
[0076]
如图1和图2所示,摄像模组还包括底座12,弹性电路板7、感光芯片组件8以及第一柔性电路板6放置在底座12上,外壳21与底座12连接,也就是说,承台22在底座12上的投影面积小于底座12的面积。
[0077]
在可选的实施例中,感光芯片组件8包括感光电路板和设于感光电路板上的感光芯片,感光电路板通过弹性电路板7设于第三通孔内。
[0078]
需要说明的是,四个第一磁性件42均设置在感光电路板上,例如,第一磁性件42粘接在感光电路板上。
[0079]
此外,本技术实施例还提供一种电子设备,包括:上述的摄像模组。
[0080]
具体地,由于电子设备包括如上所述的摄像模组,摄像模组的具体结构参照上述实施例,则本实施例所示的电子设备包括了上述实施例的全部技术方案,因此至少具有上述全部技术方案所取得的所有有益效果,在此不再一一赘述。
[0081]
当然,在本技术实施例中,电子设备包括但不限于手机、平板电脑、笔记本电脑、掌上电脑、车载终端、可穿戴设备、以及计步器等。本技术实施例对电子设备的具体类型不做具体限定。
[0082]
在本说明书的描述中,参考术语“可选的实施”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0083]
尽管已经示出和描述了本技术的实施例,本领域的普通技术人员可以理解:在不脱离本技术的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本技术的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1