一种毫米波MIMO系统中用户位置追踪方法
一种毫米波mimo系统中用户位置追踪方法
技术领域
1.本发明涉及无线通讯技术领域,尤其涉及一种毫米波mimo系统中用户位置追踪方法。
背景技术:
2.在第五代和第六代蜂窝通信网络中,毫米波mimo系统被认为是一项至关重要的技术。得益于毫米波mimo系统高频谱效率,蜂窝无线通信能够实现更大的系统容量与更高的通信可靠性。除此之外,由于毫米波阵列具有较高的角度分辨率,可以借助毫米波mimo系统实现次米级定位,因此,物联网、自动驾驶、社交网络等应用能够高效开展。
3.毫米波mimo系统定位的基本特征是:利用基站接收到的用户信号,对其中时延、到达角、信号接收强度等位置相关信息进行提取,然后根据上述信息对用户位置进行精确的恢复。因此,开发出高效的毫米波mimo系统定位方法是十分必要的。
4.现阶段的多基站mimo定位算法一般分为两类,分别为两步定位方法和直接定位方法。在两步定位方法中,基站首先根据接收到的信号,对用户的信号时延、到达角、接收强度等信息进行估计,然后通过三边定位或三角定位技术确定用户位置。在直接定位方法中,基站根据接收信号直接恢复用户位置,不需要进行中间参数估计,能够实现多基站系统高精度定位。
5.但是在大部分现有研究中,两种定位方法均考虑的对静止状态下用户定位。然而,在实际蜂窝网络通信场景下,一些用户往往处于高速运动的状态,例如自动驾驶、车联网、无人机等应用。在这种情况下,传统全球定位系统(gps)尚无法满足实际次米级定位精度需求。因此,开发出一种在高速运动场景下用户位置跟踪算法是亟需的。
技术实现要素:
6.技术问题:针对现有毫米波mimo系统的仅考虑对静止状态用户定位,无法满足未来高速移动场景定位需求,本发明提出一种毫米波mimo系统中用户位置追踪方法,本发明能够在任意阵列形态的多基站毫米波mimo系统中,实现对快速运动用户高精度位置追踪。本发明中用户信道估计采用近似广义消息传递算法,极大降低了用户位置追踪的复杂度,实现了毫米波快速定位需求。
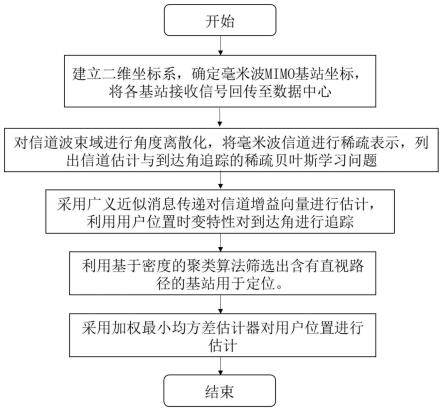
7.技术方案:为实现本发明的目的,本发明的一种毫米波mimo系统中用户位置追踪方法具体包括如下步骤:
8.s1:建立二维空间坐标系,确定毫米波mimo基站的物理坐标,各基站将接收到的用户信号回传至数据中心进行联合处理;
9.s2:对信道波束域进行角度离散化,将毫米波信道进行稀疏表示,列出信道估计与到达角追踪的稀疏贝叶斯学习问题;
10.s3:采用广义近似消息传递对信道增益向量进行估计,利用用户位置时变特性对到达角进行追踪;
11.s4:利用基于密度的聚类算法dbscan筛选出含有直视路径的基站用于定位;
12.s5:采用加权最小均方差wls估计器对用户位置进行估计。
13.其中,
14.所述步骤s1具体如下:
15.s1.1:定义二维目标定位区域以区域中心为原点建立二维坐标系,设第m个毫米波mimo基站位置为在第t时刻,待测用户位置为
16.s1.2:在第t时刻,定义用户发射的窄带信号向量为各基站接收信号为
[0017][0018]
其中:p为传输信号的能量,h
t,m
为在t时刻用户与第m个基站之间的信道矢量,n
t,m
为t时刻接收噪声矩阵,n
t,m
中各元素时间空间均不相关,服从零均值高斯分布,噪声方差为σ2;
[0019]
s1.3:根据毫米波信道稀疏特性,确定出信道矢量表达形式,具体为:
[0020][0021]
其中:p
t,m
表示t时刻可分辨路径数量,am(θ)为阵列响应矢量,α
t,m,1
和θ
t,m,1
分别表示直视路径的增益与到达角,和分别表示非直视路径的增益和到达角;
[0022]
s1.4:在t时刻,用户位置与直视路径到达角之间空间几何关系可以表达为:
[0023][0024]
令表示为第m个基站的第n根天线相对于阵列重心的位置,假设天线是各向同性且无耦合,对于入射角θ,阵列导引矢量可以表示为:
[0025][0026]
其中j表示单位虚数,λ表示载波频率。
[0027]
所述步骤s2具体为:
[0028]
s2.1:由于毫米波信道能量仅集中在某些角度区域,因此通过对波束域信道进行角度离散后将毫米波信道hm进行稀疏表示;对于第m个基站,定义s个均匀角度离散点,即:
[0029][0030]
其中:为角度离散点;考虑均匀离散角度离散角度数量远远大于毫米波信道可分辨路径数量,即s>>p
t,m
;
[0031]
s2.2:在实际中,到达角θ
t,m,p
通常不会准确的匹配离散角度集合中的角度离散点,特别是当离散点数量s选取不够大;为了避免这种模型失配,将离网角度信息引入角度离散,这种情况下到达角可以表示为:
[0032][0033]
其中,表示距离到达角θ
t,m,p
最近的离散点,表示离网角度;
[0034]
根据以上参数定义,毫米波信道h
t,m
表示为:
[0035]ht,m
=a
t,m
(δ
t,m
)u
t,m
,
[0036]
其中,δ
t,m
=[δ
t,m,1
,δ
t,m,2
,...,δ
t,m,s
]
t
表示离网角度向量,如果i=r
t,m,p
,那么否则δ
t,m,i
=0;另外,信道响应矩阵稀疏信道增益向量u
t,m
=[u
t,m,1
,u
t,m,2
,...,u
t,m,s
]
t
;在u
t,m
中,其第r
t,m,p
个元素对应于信道路径增益,即可以看出离网角度向量δ
t,m
与路径增益向量u
t,m
有相同的支撑集;进一步的,在信道相应矩阵a
t,m
(δ
t,m
)中,在每个角度离散点处进行一阶泰勒展开近似,信道相应矩阵可以表示为:
[0037][0038]
其中,δ
t,m
=diag(δ
t,m,1
,δ
t,m,2
...,δ
t,m,s
),表示在点处的导数;
[0039]
s2.3:根据s2.2中给出的角度离散化信息,接收信号表示为:
[0040][0041]
其中,a
t
(δ
t
)=blkdiag(a
t,1
(δ
t,1
),a
t,2
(δ
t,2
),...,a
t,m
(δ
t,m
)),)),
[0042]
s2.4:由于用户运动位置发生改变,到达角为时变参数,采用一阶马尔科夫过程,相邻时刻之间的用户到达角可以表示为:
[0043]
θ
t,m
=θ
t-1,m
+vm(t-1),t=2,3,...,t,
[0044]
其中,vm(t-1)表示驱动噪声,其服从高斯分布,均值e[vm(t)]=0,协方差矩阵e[vm(t)(vm(t))
t
]=qm,在上式中,协方差矩阵qm是对角矩阵,其对角元素未知需要后续步骤进行估计;
[0045]
s2.5:为方便计算,将接收信号进行向量化表示,具体为:
[0046][0047]
其中,
[0048]
在稀疏贝叶斯学习框架下,路径增益向量u
t
的稀疏性可以通过高斯混合模型进行表示,具体为:
[0049][0050]
其中,γ
t
=diag(γ
t
),为控制增益向量u
t
稀疏性的超参数向量,s1=ms,pr(γ
t
)表示γ
t
的先验概率;
[0051]
根据上述高斯混合模型,信道估计与角度追踪的联合概率密度函数可以表示为:
[0052][0053]
其中,y=[y1,y2,...,y
t
],进一步的有:
[0054][0055]
以及
[0056][0057]
s2.6:在稀疏贝叶斯学习框架中,通常采用无信息先验,也就是说步骤s2.5中的联合概率密度函数中的先验概率pr(γ
t
)可以设置为单位量并且不会影响最终信道稀疏性;基于步骤s2.5以及上述分析,信道估计与角度追踪可以表达为如下最优化问题,即:
[0058][0059]
通过求解上式,得到用户的信道增益和到达角度信息。
[0060]
所述步骤s3具体为:
[0061]
s3.1:由于步骤s2.6中最优化问题目标函数非凸,其不存在闭式解,求解该问题分为两步,首先采用广义近似消息传递算法对路径增益向量进行估计,得到估计值然后对时变到达角进行跟踪,得到估计值
[0062]
s3.2:根据s3.1中对于路径增益向量的估计值可以粗略得到各时刻的到达角信息,为进一步得到每时刻精确到达角信息,进一步推导时变到达角追踪的更新公式;根据s2.4所述,离网角度δ
t
与其前一个时刻状态δ
t-1
是时间相关的,并且关于离网角度的联合概率密度函数在s2.5中给出,因此通过最大似然方法估计出各时刻的离网角度,具体如下:
[0063][0064]
其中,上式所出现符号在权利要求2,3所述步骤可见,
[0065]
s3.3:在上述步骤s3.1和s3.2信道估计和角度追踪过程中,需要得到超参数γ和协方差矩阵q的估计值,基于最大似然策略,可以通过最大化超参数γ的联合概率密度函数得到其估计值,具体为:
[0066][0067]
其中,上式所出现符号在权利要求2,3所述步骤可见;
[0068]
同样的,协方差矩阵q=blkdiag(q1,q2,...,qm)的估计值可以通过最大化其联合概率密度函数得到,具体为:
[0069][0070]
其中,上式所出现符号在权利要求2,3所述步骤可见;
[0071]
特别的,对于步骤s3.1至s3.3中,待估计量信道增益、到达角、超参数、协方差矩阵之间是相互耦合的,为了得到上述参量的一致估计,需要循环执行s3.1至s3.3直至收敛。
[0072]
所述步骤s4中,利用基于密度的聚类算法筛选出含有直视路径的基站用于定位,具体的讲,毫米波稀疏信道中直视径的信道增益远大于其他非直视径的信道增益,根据这一特性,从步骤s3中得到的信道信息中初步筛选出每个基站可能的直视径用于定位;由于物体遮挡,基站与用户之间直视径可能不存在,因此采用基于密度的聚类算法将含有直视径的基站筛选出来用于最终定位。
[0073]
所述步骤s5中,采用加权最小均方差wls估计器对用户位置进行估计,具体的讲,根据上述步骤s4中得到的直视路径的到达角信息,利用步骤s1.4中描述的位置角度间的几何关系,构造三角定位方程,利用加权最小均方误差估计器进行求解,得到各时刻用户位置信息。
[0074]
有益效果:与现有技术相比,本发明的技术方案具有以下有益技术效果:
[0075]
1)本发明能够在任意阵列形态的多基站毫米波mimo系统中,实现对快速运动用户高精度位置追踪。
[0076]
2)本发明中用户信道估计采用近似广义消息传递算法,极大降低了用户位置追踪的复杂度,实现了毫米波快速定位需求。
附图说明
[0077]
图1是本发明实施例中毫米波mimo系统用户位置追踪的应用场景图;
[0078]
图2是本发明算法的流程图;
[0079]
图3是本发明与现有基站定位算法的均方差性能对比图;
[0080]
图4是本发明的现有基站定位算法的定位误差累计概率密度对比图。
具体实施方式
[0081]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。其中,所描述的实施例是本发明一部分实施例,而不是全部的实施例。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。
[0082]
实施例1
[0083]
本技术提供的快速定位方法,可以应用于如图1所示的应用环境中。其中,用户终端与基站进行通信。例如,基站接收预设位置处终端发送的目标信号,得到真实接收信号。其中,终端可以但不限于是各种个人计算机、笔记本电脑、智能手机、平板电脑和便携式可穿戴设备,基站为多个基站组成的基站集群来实现。
[0084]
参考图2,本实施例提供了一种毫米波mimo系统中用户位置追踪定位方法,具体包括如下步骤:
[0085]
步骤s1:建立二维空间坐标系,确定毫米波mimo基站的物理坐标,各基站将接收到
的用户信号回传至数据中心进行联合处理,具体如下:
[0086]
步骤s1.1:定义二维目标定位区域以区域中心为原点建立二维坐标系,设第m个毫米波mimo基站位置为在第t时刻,待测用户位置为
[0087]
步骤s1.2:在第t时刻,定义用户发射的窄带信号向量为各基站接收信号为
[0088][0089]
其中:p为传输信号的能量,h
t,m
为在t时刻用户与第m个基站之间的信道矢量,nm为接收噪声矢量,nm中各元素时间空间均不相关,服从零均值高斯分布,噪声方差为σ2;
[0090]
步骤s1.3:根据毫米波信道稀疏特性,确定出信道矢量表达形式,具体为:
[0091][0092]
其中:p
t,m
表示t时刻可分辨路径数量,am(θ)为阵列响应矢量,α
t,m,1
和θ
t,m,1
分别表示直视路径的增益与到达角,和分别表示非直视路径的增益和到达角;
[0093]
步骤s1.4:在t时刻,用户位置与直视路径到达角之间空间几何关系可以表达为:
[0094][0095]
令表示为第m个基站的第n根天线相对于阵列重心的位置,假设天线是各向同性且无耦合,阵列导引矢量可以表示为:
[0096][0097]
其中j表示单位虚数,λ表示载波频率。
[0098]
步骤s2:对信道波束域进行角度离散化,将毫米波信道进行稀疏表示,列出信道估计与到达角追踪的稀疏贝叶斯学习问题,具体如下:
[0099]
步骤s2.1:由于毫米波信道能量仅集中在某些角度区域,因此可以通过对波束域信道进行角度离散后将毫米波信道hm进行稀疏表示。对于第m个基站,定义s个均匀角度离散点,即:
[0100][0101]
其中:考虑均匀离散角度离散角度数量远远大于毫米波信道可分辨路径数量,即s>>p
t,m
。
[0102]
步骤s2.2:在实际中,到达角θ
t,m,p
通常不会准确的匹配离散角度集合中的角度离散点,特别是当离散点数量s选取不够大。为了避免这种模型失配,将离网角度信息引入角度离散,这种情况下到达角可以表示为
[0103][0104]
其中,表示距离到达角θ
t,m,p
最近的离散点,表示离
网角度。
[0105]
根据以上参数定义,毫米波信道h
t,m
可以表示为:
[0106]ht,m
=a
t,m
(δ
t,m
)u
t,m
,
[0107]
其中,δ
t,m
=[δ
t,m,1
,δ
t,m,2
,...,δ
t,m,s
]
t
表示离网角度向量,如果i=r
t,m,p
,那么否则δ
t,m,i
=0。另外,信道响应矩阵稀疏信道增益向量u
t,m
=[u
t,m,1
,u
t,m,2
,...,u
t,m,s
]
t
。在u
t,m
中,其第r
t,m,p
个元素对应于信道路径增益,即可以看出离网角度向量δ
t,m
与路径增益向量u
t,m
有相同的支撑集。进一步的,在信道相应矩阵a
t,m
(δ
t,m
)中,在每个角度离散点处进行一阶泰勒展开近似,信道相应矩阵可以表示为:
[0108][0109]
其中,δ
t,m
=diag(δ
t,m,1
,δ
t,m,2
...,δ
t,m,s
),表示在点处的导数。
[0110]
步骤s2.3:根据s2.2中给出的角度离散化信息,接收信号可以表示为:
[0111][0112]
其中,a
t
(δ
t
)=blkdiag(a
t,1
(δ
t,1
),a
t,2
(δ
t,2
),...,a
t,m
(δ
t,m
)),
[0113]
步骤s2.4:由于用户运动位置发生改变,到达角为时变参数。采用一阶马尔科夫过程,相邻时刻之间的用户到达角可以表示为:
[0114]
θ
t,m
=θ
t-1,m
+vm(t-1),t=2,3,...,t,
[0115]
其中,vm(t-1)表示驱动噪声,其服从高斯分布,均值e[vm(t)]=0,协方差矩阵e[vm(t)(vm(t))
t
]=qm。在上式中,协方差矩阵qm是对角矩阵,其对角元素未知需要后续步骤进行估计。
[0116]
步骤s2.5:为方便计算,将接收信号进行向量化表示,具体为:
[0117][0118]
其中,
[0119]
在稀疏贝叶斯学习框架下,路径增益向量u
t
的稀疏性可以通过高斯混合模型进行表示,具体为:
[0120][0121]
其中,γ
t
=diag(γ
t
),为控制增益向量u
t
稀疏性的超参数向量,s1=ms,pr(γ
t
)表示γ
t
的先验概率。
[0122]
根据上述高斯混合模型,信道估计与角度追踪的联合概率密度函数可以表示为:
[0123]
[0124]
其中,y=[y1,y2,...,y
t
],进一步的,我们有
[0125][0126]
以及
[0127][0128]
步骤s2.6:在稀疏贝叶斯学习框架中,通常采用无信息先验,也就是说联合概率密度函数中的先验概率pr(γ
t
)可以设置为单位量并且不会影响最终信道稀疏性。基于步骤s2.5以及上述分析,信道估计与角度追踪可以表达为如下最优化问题,即:
[0129][0130]
通过求解上式,可以得到用户的信道增益和到达角度信息。
[0131]
步骤s3:采用广义近似消息传递对信道增益向量进行估计,利用用户位置时变特性对到达角进行追踪,具体为:
[0132]
步骤s3.1:由于步骤s2.6中最优化问题目标函数非凸,其不存在闭式解。求解该问题分为两步,首先采用广义近似消息传递(gamp)算法对路径增益向量u进行估计,然后对时变到达角进行跟踪。在广义近似消息传递算法中,定义输入函数gs(p,υ
p
)和输出函数gu(r,υr)分别为:
[0133][0134][0135]
其中,p,υ
p
,r,υr为中间参量。
[0136]
进一步的,根据s2.3中接收信号的线性模型,上式输入函数可以具体表达为:
[0137][0138]
其关于向量p的偏导数为g's(p,υ
p
)=σ-2
./(σ-2
+υ
p
)。在这里,a.b和a./b分别表示按元素相乘和按元素相除。
[0139]
根据s2.5中稀疏向量u的高斯混合模型,输出函数具体可以表达为:
[0140]gu
(r,υr)=1./(1+γ
t
.υr).r,
[0141]
其关于向量r的偏导数为g
′u(r,υr)=1./(1+γ
t
.υr)。基于gamp的信道估计算法具体步骤如下给出:
[0142][0143][0144]
步骤s3.2:根据s3.1中对于路径增益向量的估计值可以粗略得到各时刻的到达角信息。为进一步得到每时刻精确到达角信息,可以进一步推导时变到达角追踪的更新公式。根据s2.4所述,离网角度δ
t
与其前一个时刻状态δ
t-1
是时间相关的,并且关于离网角度的联合概率密度函数在s2.5中给出,因此可以通过最大似然方法估计出各时刻的离网角度,具体如下:
[0145][0146]
其中,δ
t
=diag(δ
t
),特别的,如果i=r
t,m,p
,否则
在上式中,接收信号向量和其协方差矩阵分别为:
[0147][0148][0149]
其中,输入函数[gs(p,υ
p
)]i、p、υ
p
由s3.1中广义近似消息传递算法给出。
[0150]
为了得到离网角度δ
t
的估计值,下一步将g(δ
t
)和h(δ
t
)分别表达为关于δ
t
的函数,具体如下:
[0151][0152][0153]
其中,b1和b2为两个与δ
t
无关的常量。对上式进行整理,可以得到δ
t
的估计值为:
[0154][0155]
其中,其中,
[0156]
进一步的,对上式中目标函数关于δ
t
进行求导并且设置导数为零,可以得到δ
t
的估计值为:
[0157][0158]
其中,
[0159]
步骤s3.3:在上述步骤s3.1和s3.2信道估计和角度追踪过程中,需要得到超参数γ和协方差矩阵q的估计值。基于最大似然策略,可以通过最大化超参数γ的联合概率密度函数得到其估计值,具体为:
[0160][0161]
其中,和通过步骤s3.1中广义近似消息传递算法得到。
[0162]
同样的,协方差矩阵q=blkdiag(q1,q2,...,qm)可以通过最大化其联合概率密度函数得到,具体为:
[0163][0164]
其中,
[0165]
特别的,对于步骤s3.1至s3.3中,待估计量信道增益、到达角、超参数、协方差矩阵之间是相互耦合的。为了得到上述参量的一致估计,需要循环执行s3.1至s3.3直至收敛,具体算法伪代码如下:
[0166][0167][0168]
步骤s4:利用基于密度的聚类算法(dbscan)筛选出含有直视路径的基站用于定位,具体而言,毫米波稀疏信道中直视径的信道增益远大于其他非直视径的信道增益。根据这一特性,可以从步骤s3中得到的信道信息中初步筛选出每个基站可能的直视径,然后计算各直视径的交点确定用户位置。但是由于物体遮挡,基站与用户之间直视径可能不存在,如图1所示。因此采用基于密度的聚类(dbscan)算法将含有直视径的基站筛选出来用于最终定位。具体的,基于dbscan的直视径筛选算法的伪代码如下:
[0169][0170][0171]
步骤s5:采用加权最小均方差(wls)估计器对用户位置进行估计。具体的讲,利用步骤s1.4中描述的位置角度间的几何关系,可以得到:
[0172][0173]
其中,表示到达角的估计误差。通过在旋转坐标轴,可以进一步得到:
[0174][0175]
根据步骤s4中得到的存在直视径的基站信息,可以构造如下三角定位方程恢复用户位置具体为:
[0176]qt
=t
t
p
t
+ω
t
,t=1,2,...,t,
[0177]
其中,表示误差向量,定义ω
t
的协方差矩阵为ω
t
。另外上式中,
[0178][0179]
采用加权最小均方差估计器,计算得到用户位置为:
[0180][0181]
其中,在实际定位过程中,首先设置ω
t
为单位阵粗略估计出用户位置,然后计算ω
t
对角元素的精确值带入加权最小均方误差估计器得到用户位置的精确估计值。
[0182]
参考图3,图3为本实施例的位置追踪方法与现有定位方法的均方差性能对比图。在仿真参数设置中,基站数量m=4,分别位于坐标点[-50m,-50m],[-50m,50m],[50m,50m],[50m,-50m],每个基站均采用均匀圆形阵列,天线数量为nm=50,m=1,2,3,4,载波频率为30ghz毫米波段。信道生成模型采用3gpp标准定义的urban marco场景。其中随机生成用户分布在目标定位区域对t=7个时刻的用户位置进行追踪,用户运动速度20米/秒,运动方向随机。从中可以发现:
[0183]
相比于其他基站定位算法,本实施例的用户位置追踪算法能够实现更低的定位均方误差。
[0184]
参考图4,其中仿真参数的设置与图3中的仿真参数的设置相同。从中可以发现:
[0185]
在相同的定位误差要求下,相比于其他基站定位算法,本实施例的用户位置追踪算法具有更高的累计概率密度。同时在本实施例中,用户位置追踪算法可以达到分米级定位精度。
[0186]
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构和方法并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1