一种低复杂度数字预失真系统
1.本发明属于无线通信领域,涉及功率放大器线性化技术,具体涉及一种低复杂度数字预失真系统。
背景技术:
2.功率放大器作为无线信号发射机的关键元件之一,其增益、效率、线性度等指标直接决定发射机的工作性能。功放固有的非线性特性,会使通信系统产生非线性失真;特别是当前通信系统多采用高阶调制方式,信号高峰均值比(parr)的特点对功放的线性度提出了更高要求。目前关于功放的线性化技术循环主要有:前馈、负反馈、模拟预失真、数字预失真等,其中数字预失真凭借配置灵活、精度高、成本低等特点,适用于当前宽带高阶调制信号的线性化补偿,成为通信系统中极具潜力的线性化技术。
3.数字预失真作为当前最为常用的线性化技术,其主要思想是对功放的非线性行为建模,得到功放输入信号与输出信号之间的函数关系,求解其非线性逆模型。通过在功放前串联逆模型进行预失真处理,补偿功放的非线性失真,从而将信号进行线性放大。
4.数字预失真技术的关键在于模型建立和自适应算法的选择。功放模型主要有volterra级数模型、广义记忆多项式(gmp)模型、记忆多项式(mp)模型,volterra级数精度高但复杂度随记忆深度呈指数增加,记忆多项式模型精度略低但复杂度远小于volterra级数。同样地,自适应算法包括最小二乘法(lm)、递归最小二乘法(rls)、最小均方算法(lms),递归最小二乘法复杂度高于最小二乘法,但其收敛速度快,精度高。如何保证现有算法的高精度,同时降低其计算复杂度,是数字预失真亟待解决的问题。
5.故,针对目前现有技术中存在的上述缺陷,实有必要进行研究,以提供一种方案,解决现有技术中存在的缺陷。
技术实现要素:
6.为解决传统数字预失真系统复杂度高的局限,本发明提出了一种低复杂度数字预失真系统,其核心在于采用记忆多项式对功率放大器进行建模,功率放大器求逆过程采用一种低复杂度算法neumann算法求解,通过neumann近似求逆得到初始预失真参数,配合rls算法进行迭代更新,在降低迭代次数的同时能够满足数字预示真系统的精度需求。
7.为了解决现有技术存在的技术问题,本发明的技术方案如下:
8.一种低复杂度数字预失真系统,主要包括信号发射通路、信号反馈通路及数据处理模块:
9.信号发射通路包括数模转换器、上变频、功率放大器。数字调制信号经数模转换器(dac)转换为模拟信号,通过上变频到指定频率,再由功率放大器进行信号放大。
10.信号反馈通路包括耦合器、功率衰减器、下变频及模数转换器(adc)。功率放大器输出信号y(t)通过耦合器产生反馈通路,通过功率衰减器进行信号衰减,经下变频器变频后,由模数转换器(adc)进行模拟信号转换,反馈到自适应模块。
11.数据处理模块包括数字预失真器和自适应模块,通过fpga实现。数字预失真器通过预失真参数对初始输入信号进行预失真处理,产生预失真信号z(n)。自适应模块采用间接学习结构,其一输入端连接数字预失真器的输出,另一输入端连接反馈通路的模数转换器输出,利用记忆多项式模型对功率放大器的非线性行为进行建模,通过neumann级数近似求逆算法求解功放的逆模型,取样部分主要样本通过rls算法迭代更新,生成迭代预失真参数传送至数字预失真器。
12.为了解决现有技术计算复杂度大,运算时间长的问题,本发明的技术方案如下:
13.(1)本系统采用mp模型对功放的非线性行为进行建模,其模型表达式为:该模型是volterra技术模型的简化,只保留对角元素,大幅减少了功放模型参量且保证了建模精度。
14.(2)矩阵求逆运算量巨大且对硬件要求高,功放的非线性模型求逆过程决定了整个系统的复杂度。本系统采用neumann级数近似求逆的方法,避免对大型矩阵直接求逆,降低系统整体复杂度和硬件成本。具体实现过程如下:
15.若待求逆矩阵z近似于可逆矩阵x,有:则z-1
可通过neumann级数近似为:将矩阵z分解为由对角元素组成的矩阵d和其他元素组成的矩阵e,若矩阵d可逆且收敛,那么n取值越小则系统的计算复杂度越低,其计算复杂度主要来源于对角矩阵d-1
的求解,对于m
×
k矩阵其复杂度为o(k2),而直接求逆的复杂度为o(k3)。
16.(3)自适应模块采用rls算法对功放非线性建模和求逆过程产生的误差进行优化,以确保数字预失真系统整体精度。
17.通过数字预失真器输出信号z(n)和自适应模块输出信号构建目标函数:
[0018][0019]
rls算法迭代过程如下:
[0020]
步骤s11、初始化,设定n=0,w(0)=[1,0
…
,0]
t
,λ取略小于1的值(0.97、0.98
…
),逆矩阵p(0)=δ-1
i(i为单位矩阵)。
[0021]
步骤s12、当n=1,2,..更新增益矢量:
[0022][0023]
步骤s13、更新可逆矩阵p(n):
[0024]
p(n)=λ-1
[p(n-1)-g(n)uhp(n-1)]
[0025]
步骤s14、迭代输出预失真参数:
[0026]
w(n+1)=w(n)+k(n)e*(n)
[0027]
与现有技术相比,本发明的技术方案具有如下技术效果:
[0028]
本系统采用neumann级数近似求逆,避免了矩阵直接求逆的大规模运算,相较于传
统矩阵分解算法如qr分解、高斯变换等,大大降低了系统复杂度和数据处理时间;特别是在多维矩阵求解中,neumann技术近似算法复杂度只有维数的平方,而其他算法至少达到维数的立方。结合rls自适应算法,对功放非线性建模和近似求逆过程产生的误差进行迭代更新,能够有效减小迭代次数并保证系统预失真处理精度。本系统相较于传统预失真算法实现了低复杂度预失真参数求逆运算,结合rls算法完成自适应迭代更新,保证了系统精度。
附图说明
[0029]
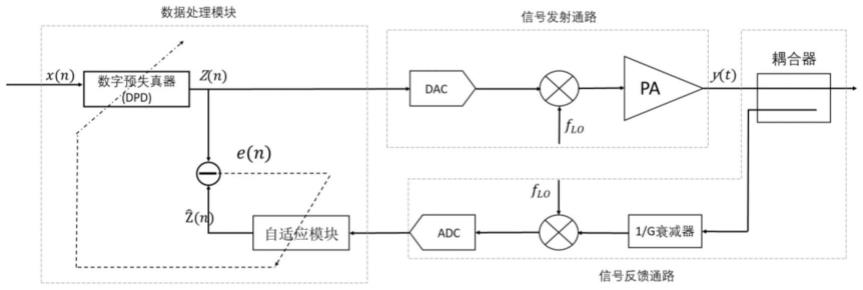
图1是本发明数字预失真的整体架构图;
[0030]
图2是本发明数字预失真系统的信号流程图;
[0031]
图3是记忆多项式的框架图;
[0032]
图4是不同求逆算法的复杂度对比图;
具体实施方式
[0033]
图1所示为本发明数字预失真系统的整体架构图,该系统包括信号发射通路、信号反馈通路及数据处理模块。信号发射通路包括数模转换器、上变频、功率放大器,主要负责通信信号传输。信号反馈通路包括耦合器、功率衰减器、下变频及模数转换器(adc),用于将输入信号反馈回数据处理模块中。数据处理模块包括数字预失真器和自适应模块,采集输入输出信号进行功放的非线性行为建模,并生成逆模型传递给数字预失真器,对输入信号进行预失真以抵消功放的非线性失真。
[0034]
数字预失真系统具体工作流程如图2所示,首先设定数字预失真器的非线性模型及自适应算法,本文选定mp模型及rls算法;关闭数字预失真器,使输入信号直接通过功放并反馈回自适应模块。自适应模块采集输入信号和输出非线性失真信号,对功放非线性行为建模。采用自适应算法对建模误差进行迭代学习,若参数收敛,则开启数字预失真器对输入信号预失真处理,若参数未收敛则继续迭代或更换自适应算法。根据线性化指标判断是否满足需求,若满足则完成预失真处理,若不满足则需判断功放工作状态是否发生变化,若变化则重新采集功放非线性失真信号,否则需要更换非线性模型。
[0035]
具体地,数据处理模块中,输入数字调制信号为x(n),数字预失真器采用mp模型进行预失真处理,其mp模型表达式为:行预失真处理,其mp模型表达式为:m为记忆深度,k维非线性阶数(本发明中取m=5,k=5)。则信号经数字预示器处理后输出为:采用矩阵形式表达:
[0036][0037][0038][0039]
b=[a
1,0a1,1
···a1,ma2,0
···ak,m
]
t
[0040]
则数字预失真器输出信号表示为:z=u
x
b。
[0041]
当信号流经功放后产生的信号y(t),经1/g衰减器、下变频、adc得到,输入自适应
模块的信号为则自适应模块输入输出信号关系有:
[0042][0043]
其中:
[0044][0045]yk,m
=[y
k,m
(n1)y
k,m
(n2)
···yk,m
(nn)]
[0046]
y=[y
1,0y1,1
…y2,0
…yk,m
]
[0047]
w=[w
1,0w1,1
···w1,mw2,0
···wk,m
]
t
[0048][0049]
初始预失真参数矩阵w采用neumann近似求逆得到。当x-1
满足则矩阵x-1
为u
x
矩阵逆矩阵的初始值,将矩阵y拆分为对角元素d及其他元素矩阵e,则y的逆可近似为(本发明取n=2),得到y-1
≈d-1-d-1
ed-1
,得到预失真参数矩阵w=(d-1-d-1
ed-1
)避免了直接对矩阵y求逆。图4给出了不同常用算法求逆复杂度,与其他算法相比,基于neumann级数求逆大大降低了矩阵运算复杂度。
[0050]
信号流经功放后,由反馈回路传输至自适应模块。自适应模块采集预失真器输出信号与功放输出信号,通过误差函数调整数字预失真参数,不断减小误差。其具体实现过如下:
[0051]
步骤s11、建立目标函数:
[0052][0053]
步骤s12、初始化设定:n=0,w(0)=[1,0,
…
,0]
t
,逆矩阵p(0)=δ-1
i(δ为小的正实数)。
[0054]
步骤s13、当n=1,2,..更新增益矢量:
[0055][0056]
步骤s14、更新可逆矩阵p(n):
[0057]
p(n)=λ-1
[p(n-1)-k(n)u
x
p(n-1)]
[0058]
步骤s15、更新预失真误差
[0059][0060]
步骤s16、迭代预失真参数
[0061]
w(n+1)=w(n)+k(n)e*(n)
[0062]
若预失真误差e(n)收敛,则输出预失真参数w(n)并传送至数字预失真器b(n);若
不收敛则继续迭代。
[0063]
更新后的预失真参数通过预失真器对信号预失真处理,再由功放输出,达到最佳线性化效果。
[0064]
本系统采用neumann级数近似求逆,避免了矩阵直接求逆的大规模运算,降低了系统复杂度和数据处理时间。结合rls自适应算法,对功放非线性建模和近似求逆过程产生的误差进行迭代更新,保证了系统预失真处理的精度需求,相较于传统算法实现了低复杂度完成自适应迭代更新,保证了系统精度。
[0065]
以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。对这些实施例的多种修改对本领域的专业技术人员来说是显而易见的,本技术中所定义的一般原理可以在不脱离本发明的精神或范围的情况下在其它实施例中实现。因此,本发明将不会被限制于本技术所示的这些实施例,而是要符合与本技术所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1