车辆生态系统通信的智能消息框架的制作方法
本公开总体上涉及装置通信领域,更具体地涉及用于在车辆生态系统中适用的下一代自主通信系统的框架,用于智能、上下文感知和语义通信。
背景技术:
1、当今适用的最先进的消息传递协议是高级消息队列协议(amqp)、消息队列遥测传输(mqtt)、简单(或流式)面向文本的消息协议(stomp)、mqtt-s,为开放式发布/订阅mqtt的扩展,其在基于iot的技术和边缘网络中大量使用。在大多数情况下,协议限制装置更像具有标准接口或合同机制的哑终端来起作用。
2、诸如mqtt、mqtt-s、amqp、stomp的现有解决方案限制装置表达能力。使用这些技术,装置通信是非语义和非上下文感知的。目前,没有汽车或车辆特定的解决方案来解决这个问题。
3、需要框架和协议以使装置以智能、上下文感知和语义模式进行通信。
技术实现思路
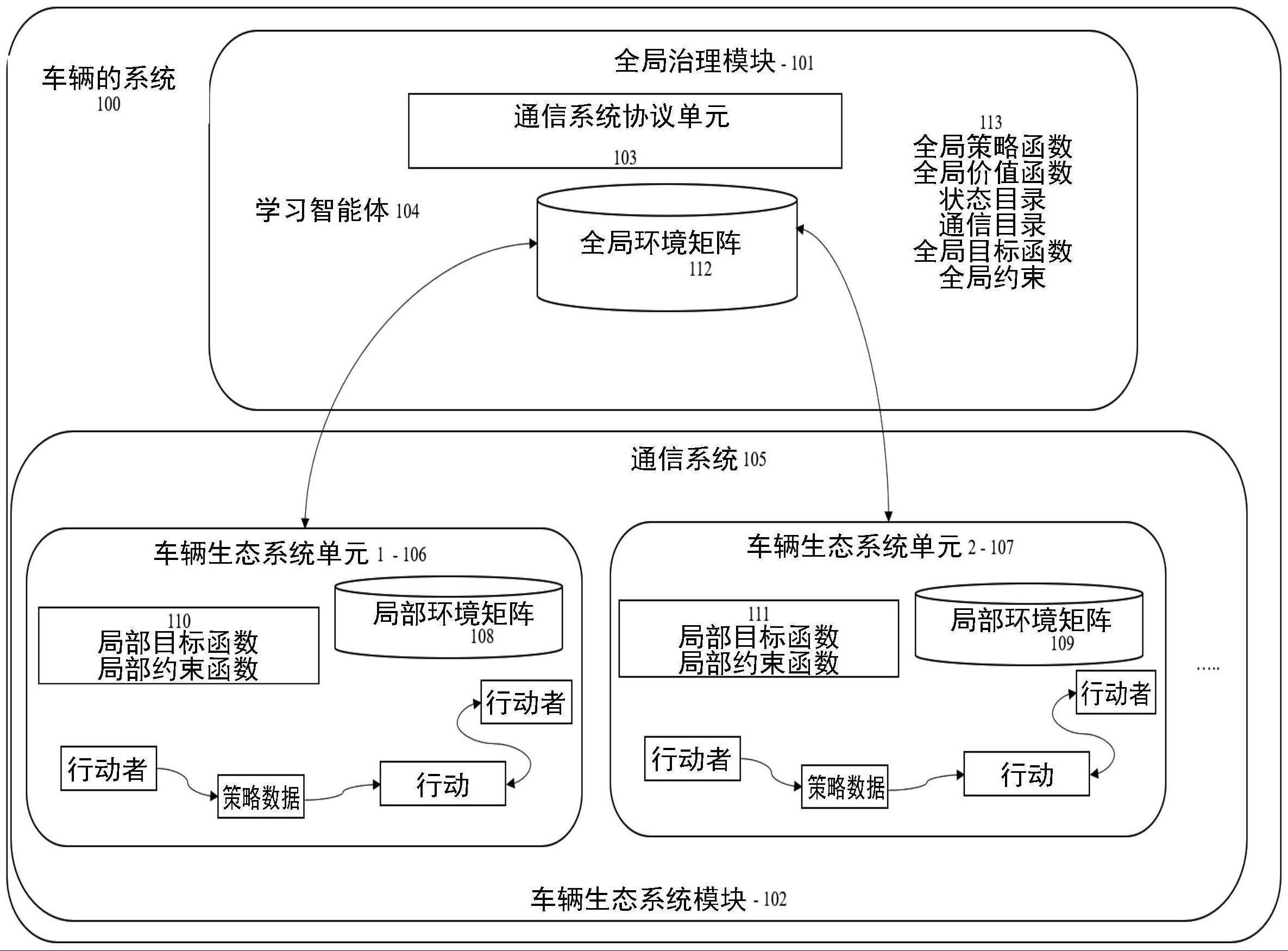
1、一实施方式涉及车辆的系统,其包括:第一车辆生态系统模块,所述第一车辆生态系统模块包括第一通信系统和第一车辆生态系统单元,所述第一车辆生态系统单元包括局部(local)环境矩阵,其中,第一车辆生态系统模块包括车辆的第一硬件部件;其中,系统配置为用于在第一车辆生态系统模块和系统内部的全局(global)治理模块之间进行自主通信,该全局治理模块包括学习智能体和包括协议单元的第二通信系统;其中,学习智能体配置为当车辆中的能源被打开时连续学习和更新规则以用于第一车辆生态系统模块的结果;其中,该系统配置为用于第一车辆生态系统单元和第二车辆生态系统单元之间的自主通信;其中,学习智能体包括用以评估场景的深度强化学习模块;其中,系统配置为在自主模式中能够启用功能;其中,第一车辆生态系统单元和第二车辆生态系统单元之间的通信独立于固定协议;并且其中,第一车辆生态系统单元的结果是基于学习智能体做出的决定而确定的。
2、根据一实施方式,第一车辆生态系统模块包括:结构边界。
3、根据一实施方式,第一车辆生态系统模块的结构边界包括:道路基础设施系统、云系统,车辆子系统,其还包括传动系统、转向系统、悬架系统、燃料喷射系统、制动系统、通信系统。
4、根据一实施方式,第一车辆生态系统模块包括:功能边界。
5、根据一实施方式,功能边界包括:安全系统、性能系统、能量效率、道路管理、交通导航、乘客舒适性。
6、根据一实施方式,第一车辆生态系统模块包括:多个车辆生态系统单元。
7、根据一实施方式,第一车辆生态系统模块配置为与全局治理模块通信以同步局部环境矩阵。
8、根据一实施方式,第一通信系统包括:发送器和接收器。
9、根据一实施方式,局部环境矩阵包括:状态、多个源、局部目标函数、局部约束函数、包括策略学习智能体的策略函数,以及基于上下文生成结果的价值函数,其中,所述多个源包括对其采取行动的任何车辆生态系统单元。
10、根据一实施方式,包括策略学习智能体的策略函数和价值函数是可定制的并且可由原始设备制造商配置。
11、根据一实施方式,第一硬件部件包括:车辆网关系统,该车辆网关系统包括微控制器、收发器、能源管理集成电路、能够通过电话、通信线和无线中的一个传输模拟和数字信号中的一个的物联网装置。
12、根据一实施方式,自主通信包括:在不同场景下具有最小监督的一时间段内的通信。
13、根据一实施方式,全局治理模块包括:包括多个靶系统的全局环境矩阵、全局策略函数以及全局价值函数、状态目录、通信目录、全局目标函数和全局约束函数。
14、根据一实施方式,学习智能体将状态和行动映射到结果,并学习如何达到目标。
15、根据一实施方式,全局治理模块的第二通信系统包括:接收器和发射器。
16、根据一实施方式,全局治理模块的第二通信系统连接到云。
17、根据一实施方式,云包括以下中的一个:远程信息处理和连接天线模块、道路基础设施系统、其他车辆连接模块、充能基础设施系统、应急控制室、城市交通系统、车辆子系统内的任何其他相关电子控制单元。
18、根据一实施方式,全局治理模块与第一车辆生态系统模块和云交互并且从场景确定上下文。
19、根据一实施方式,全局治理模块协调第一车辆生态系统单元和第二车辆生态系统单元之间的通信。
20、根据一实施方式,全局治理模块定义了第一车辆生态系统单元和第二车辆生态系统单元之间的通信的规则和顺序。
21、根据一实施方式,全局治理模块配置为注册新的车辆生态系统单元。
22、根据一实施方式,全局治理模块配置为注销新的车辆生态系统单元。
23、根据一实施方式,全局治理模块配置为感知和检测威胁。
24、根据一实施方式,协议单元促进局部环境矩阵以同步到全局治理模块的全局环境矩阵中的最新信息。
25、根据一实施方式,协议单元包括有效负载内容,其中,有效负载内容的预定义消息模板的变量由行动变量和状态变量的价值填充。
26、根据一实施方式,预定义消息模板包括:消息结构,该消息结构包括头部(header)、源、源类型、行动者、行动者类型、行动、行动类型、包括行动模板的有效负载、行动者状态价值,包括行动者密钥的签名,其中,行动者是执行结果的第一车辆生态系统单元,并且源是在其上结果被执行的第一车辆生态系统单元。
27、根据一实施方式,协议单元包括:预定义元结构,其中,消息内容取决于请求内容有效负载。
28、根据一实施方式,请求内容有效负载是基于基于nlp-bert、gpt2、gpt3技术的预训练模型生成的。
29、根据一实施方式,协议单元包括消息上层结构以容纳包括amqp、mqtt、stomp、zigbee、uds、odx、doip和obd的任何子协议结构。
30、根据一实施方式,基于全局治理模块的全局策略函数和全局价值函数,更新学习智能体的规则。
31、根据一实施方式,基于来自系统结果的反馈,更新学习智能体的规则。
32、根据一实施方式,结果是第一车辆生态系统模块的行动,其进一步包括抵靠操作环境中的源的可能的行动链,其中,源包括对其采取行动的第一车辆生态系统单元。
33、根据一实施方式,结果是行动并且基于状态-价值函数和局部目标函数。
34、根据一实施方式,行动将车辆的当前状态改变为车辆的新状态。
35、根据一实施方式,车辆中的能源被打开,车辆的模式包括以下中的一个:驾驶模式、倒车模式、充能模式和驻车模式。
36、根据一实施方式,深度强化学习模块包括以下中的至少一个:动态编程、蒙特卡罗、时间差、q学习、sarsa、r学习和函数逼近法。
37、根据一实施方式,评估包括分析来自将处于当前状态的系统转换到下一状态的各个行动的结果,其中,状态是连续函数,并且系统通过选择正确的行动类型从频谱状态的低价值端朝向频谱状态的高价端移动。
38、根据一实施方式,场景包括当系统与系统外的元件交互时发生的可能事件。
39、根据一实施方式,功能包括在任何两个系统之间发生并修改预定义状态的任何类型的系统事务。
40、根据一实施方式,自主模式包括独立且不受监督的模式。
41、根据一实施方式,基于规则的系统包括场景的事实集合和用于如何处理包括if和then语句的事实集合的规则集合,其中,场景是在系统中预定义的。
42、根据一实施方式,通信包括在第一通信系统和第二通信系统之间、在第一车辆生态系统单元和第二车辆生态系统单元之间、在第一车辆生态系统模块和全局治理模块之间传输数据、指令和信息中的一个。
43、根据一实施方式,协议单元包括规则、语法、语义和通信同步以及可能的错误恢复方法,形成上层结构以容纳包括amqp、mqtt、stomp、zigbee、uds、odx、doip和obd的任何子协议。
44、根据一实施方式,固定协议包括amqp、mqtt、stomp、zigbee、uds、odx、doip、obd以及任何预定义协议标准。
45、根据一实施方式,协议单元包括硬件、软件以及硬件和软件的组合中的一个。
46、根据一实施方式,学习智能体基于场景的结果随时间演变。
47、根据一实施方式,系统处于操作环境中,其中,操作环境是动态的。
48、根据一实施方式,在第一车辆生态系统单元和第二车辆生态系统单元之间的通信配置为调用结果以对齐满足局部目标函数和全局目标函数的策略函数。
49、根据一实施方式,系统配置为以上下文感知的、智能的和以语义的方式来确定结果。
50、根据一实施方式,系统还包括第一车辆生态系统模块和全局治理模块中间的区域治理模块。
51、根据一实施方式,协议单元配置为从场景的数据流中不断地学习。
52、根据一实施方式,针对协议更新学习智能体的规则是基于连续学习的。
53、根据一实施方式,决定是关于在学习智能体仔细评估场景之后从所有可能的结果中挑选结果的结论。
54、根据一实施方式,场景包括第一车辆生态系统单元与云单元通信以在指定的时间量内识别区域限制内的可用车辆集合,并且进一步第一车辆生态系统单元下载交通策略数据,获得批准后来自车辆生态系统单元的驾驶员辅助数据。
55、根据一实施方式,场景包括第一车辆生态系统单元与运输和道路基础设施系统通信以获取用于给定目的地和路线集合的前期信息,其中,前期信息包括通行费、道路质量基础设施,包括有轨电车、公共汽车、火车的可能的公共交通干预措施数量,以及正在进行的建设工作的信息。
56、根据一实施方式,场景的前期信息包括定性和定量数据。
57、根据一实施方式,场景包括第一车辆生态系统单元与局部天气系统通信以获取用于给定目的地和路线的早期接近准确的天气。
58、根据一实施方式,场景包括第一车辆生态系统单元与具有给定目的地和路线的道路照明系统通信以获取定量和定性数据,这提供对做出决定的更好洞察。
59、根据一实施方式,场景包括第一车辆生态系统单元与驻车系统通信以为给定目的地路线和包括购物、食物和娱乐的信息的途中行程的集合找到可用的驻车位。
60、根据一实施方式,场景包括第一车辆生态系统单元与充能基础设施通信以获取充能插槽的可用性、充能速度和范围。
61、根据一实施方式,在充能基础设施出现问题的情况下,第一车辆生态系统单元就充能站的故障警告充能中央系统,并且从充能基础设施发送诊断数据。
62、根据一实施方式,场景包括第一车辆生态系统单元,该第一车辆生态系统单元包括网关单元,该网关单元使用基于位置的系统来发送紧急警告以在前往移动车辆服务系统的途中。
63、根据一实施方式,移动车辆服务系统配置为抵靠第一车辆生态系统单元运行定期诊断故障排除,并在可能时执行服务和更换,并建立与紧急支持系统的连接以将车辆拖到最近的服务站。
64、根据一实施方式,场景包括第一车辆生态系统单元与城市信息中心通信帮助其导航以获取关于相关区域的最新相关更新,其中,最新相关更新包含定量和定性数据,该数据包括在特定地点的公共事件、交通拥堵、下雨造成的交通路线、新策略、新法律、任何攻击、在相关区域的其他部分中的任何事故。
65、根据一实施方式,第一车辆生态系统单元配置为与基于位置的系统协同操作以对定量和定性数据进行三角测量。
66、根据一实施方式,场景包括第一车辆生态系统单元与公共交通系统和交通控制系统通信以获取包括在主要高速公路、公路和历史交通概况和模型中的实时交通拥堵的数据,其中,数据帮助第一车辆生态系统单元在给定目的地的路线识别方面做出准确的决定。
67、根据一实施方式,场景包括第一车辆生态系统单元遇到乘客的紧急情况,其中,第一车辆生态系统单元就关于乘客的更多细节与救护车系统通信。
68、根据一实施方式,场景包括第一车辆生态系统单元遇到包括车辆紧急情况的紧急情况,其中,第一车辆生态系统单元向车辆紧急情况服务发送和接收车辆诊断信息以路由移动服务站。
69、根据一实施方式,场景包括第一车辆生态系统单元遇到紧急情况,其中,第一车辆生态系统单元与第二车辆生态系统单元通信以获得可能的帮助。
70、根据一实施方式,场景包括第一车辆生态系统单元遇到紧急情况,另外定量和定性数据与汽车保险系统共享以利用保险利益和调整保费。
71、根据一实施方式,场景包括第一车辆生态系统单元与车队管理系统通信,车队管理系统将使用基于位置的系统和车队管理系统对第一车辆生态系统单元的位置进行三角测量并在第二车辆生态系统单元的帮助下确认该位置,该第二车辆生态系统单元是车队的一部分,其中,第一车辆生态系统单元的车辆的所有者启用车队模式以获得额外收入,并且其中,保持车队模式直到所有者基于策略函数决定退回。
72、另一实施方式涉及车辆的系统,该车辆的系统包括第一车辆生态系统模块,所述第一车辆生态系统模块包括第一通信系统和第一车辆生态系统单元,所述第一车辆生态系统单元包括局部环境矩阵,其中,第一车辆生态系统模块包括车辆的第一硬件部件;其中,系统配置为用于在第一车辆生态系统模块和系统外部的全局治理模块之间的自主通信,该全局治理模块包括学习智能体和包括协议单元的第二通信系统;其中,学习智能体配置为当车辆中的能源被打开时连续学习和更新规则以用于第一车辆生态系统模块的结果;其中,系统配置为用于第一车辆生态系统单元和第二车辆生态系统单元之间的自主通信;其中,学习智能体包括用以评估场景的深度强化学习模块;其中,系统配置为在自主模式中能够启用功能;其中,第一车辆生态系统单元和第二车辆生态系统单元之间的通信独立于固定协议;并且其中,第一车辆生态系统单元的结果是基于由学习智能体做出的决定而确定的。
73、根据一实施方式,第一车辆生态系统模块包括结构边界,其中,第一车辆生态系统模块的结构边界包括道路基础设施系统、云系统、车辆子系统,其还包括传动系统、转向系统、悬架系统、燃料喷射系统、制动系统、通信系统。
74、根据一实施方式,第一车辆生态系统模块配置为与全局治理模块通信以同步局部环境矩阵。
75、根据一实施方式,深度强化学习模块包括以下中的至少一个:动态编程、蒙特卡罗、时间差、q学习、sarsa、r学习和函数逼近法。
76、根据一实施方式,全局治理模块与第一车辆生态系统模块和云交互并且从场景确定上下文。
77、根据一实施方式,全局治理模块协调第一车辆生态系统单元和第二车辆生态系统单元之间的通信。
78、根据一实施方式,全局治理模块配置为注册和注销新的车辆生态系统单元。
79、根据一实施方式,协议单元包括消息上层结构以容纳包括amqp、mqtt、stomp、zigbee、uds、odx、doip和obd的任何子协议结构。
80、根据一实施方式,基于全局治理模块的全局策略函数和全局价值函数,更新学习智能体的规则。
81、根据一实施方式,结果是行动并且基于状态-价值函数和局部目标函数,其中,行动将车辆的当前状态改变为车辆的新状态。
82、根据一实施方式,第一车辆生态系统单元和第二车辆生态系统单元之间的通信配置为调用结果以对齐满足局部目标函数和全局目标函数的策略函数。
83、另一实施方式涉及一方法,该方法包括从包括第一车辆生态系统单元和第一通信系统的第一车辆生态系统模块接收通信,第一通信系统包括局部环境矩阵;由包含全局治理模块的深度强化学习模块的学习智能体评估场景;通过与全局治理模块通信,动态同步第一车辆生态系统模块的局部环境矩阵;基于由学习智能体做出的决定,确定第一车辆生态系统单元的结果,其中,学习智能体配置为当车辆中的能源被打开时连续学习和更新规则以用于车辆的结果;并且执行结果;其中,该方法配置为用于第一车辆生态系统模块和全局治理模块之间的自主通信;其中,该方法配置为在自主模式中能够启用功能;其中,第一车辆生态系统单元和第二车辆生态系统单元之间的通信独立于固定协议;并且其中,第一车辆生态系统单元的结果是基于由学习智能体做出的决定而确定的。
84、根据一实施方式,基于全局治理模块的全局策略函数和全局价值函数,更新学习智能体的规则。
85、根据一实施方式,结果是行动,并且基于状态-价值函数和局部目标函数,其中,行动将车辆的当前状态改变为车辆的新状态。
86、根据一实施方式,第一车辆生态系统单元和第二车辆生态系统单元之间的通信配置为调用结果以对齐满足局部目标函数和全局目标函数的策略函数。
87、根据一实施方式,全局治理模块协调第一车辆生态系统单元和第二车辆生态系统单元之间的通信。
88、根据一实施方式,全局治理模块配置为注册和注销新的车辆生态系统单元。
89、另一实施方式涉及其上存储有指令的非暂时性计算机可读介质,该指令可由计算机系统实现以执行方法,该方法包括:从包括第一车辆生态系统单元和第一通信系统的第一车辆生态系统模块接收通信,第一通信系统包括局部环境矩阵;由包括全局治理模块的深度强化学习模块的学习智能体评估场景;通过与全局治理模块的通信,动态同步第一车辆生态系统模块的局部环境矩阵;基于由学习智能体做出的决定,确定第一车辆生态系统单元的结果,其中,学习智能体配置为当车辆中的能源被打开时连续学习和更新规则以用于车辆的结果;并且执行结果;其中,该方法配置为用于第一车辆生态系统模块和全局治理模块之间的自主通信;其中,该方法配置为在自主模式中能够启用功能;其中,第一车辆生态系统单元和第二车辆生态系统单元之间的通信独立于固定协议;并且其中,第一车辆生态系统单元的结果是基于由学习智能体做出的决定而确定的。
- 还没有人留言评论。精彩留言会获得点赞!