电路板、摄像模组及电子设备的制作方法
1.本技术涉及电子技术领域,尤其涉及一种电路板、摄像模组及电子设备。
背景技术:
2.随着智能手机、平板电脑等便携式电子设备的发展,电子设备已经成为人们日常生活中不可或缺的工具,人们可以利用电子设备实现社交和娱乐等功能。电子设备的拍摄功能成为人们日益需求的功能,对拍摄质量的要求也越来越高。
3.对应的,实现拍摄功能的摄像模组的电路也越复杂,电路越复杂对应的驱动芯片体积就越大、对应的外围电子元件就越多,这些驱动芯片和外围电子元件会增大摄像模组中电路板的尺寸,进而增加摄像模组的尺寸。
技术实现要素:
4.本技术实施例提供一种电路板、摄像模组及电子设备,能够不增加摄像模组的尺寸。
5.第一方面,本技术实施例提供一种电路板,其应用于摄像模组,所述电路板包括:
6.电路基板,用于电连接并承载平铺设置于所述电路基板的图像传感器;和
7.驱动转接板,竖直设置于所述电路基板,并与所述电路基板电连接。
8.第二方面,本技术实施例还提供一种摄像模组,其包括:
9.电路板,为上述所述的电路板;
10.图像传感器,平铺设置于所述电路基板,并与所述电路基板电连接。
11.第三方面,本技术实施例还提供一种电子设备,其包括:
12.壳体;和
13.摄像模组,安装于所述壳体,所述摄像模组为上述所述的摄像模组。
14.本技术实施例中,电路板的电路基板用于承载平铺设置的图像传感器,驱动转接板竖直设置于所述电路基板,驱动转接板只需要占用电路基板水平方向上很小的区域,驱动转接板上可以容纳更大的驱动芯片和更多的外围电子元件,驱动转接板即使增大也不会增加电路基板水平方向的占用区域,充分利用摄像模组垂直方向上的空间,相比于相关技术中,驱动转接板平铺设置于电路基板上的电路板,本技术的电路板在水平方向的尺寸更小,不会增加电路板和摄像模组水平方向的尺寸,甚至可以减少电路板和摄像模组水平方向的尺寸,因为摄像模组本身具有一定的高度,电路板充分利用该高度对应的空间设置驱动转接板,使摄像模组垂直方向的尺寸基本不影响,进而不增加摄像模组的尺寸,甚至减少摄像模组的尺寸,有利于摄像模组的小型化。
附图说明
15.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于
本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.为了更完整地理解本技术及其有益效果,下面将结合附图来进行以下说明,其中在下面的描述中相同的附图标号表示相同部分。
17.图1为本技术实施例提供的摄像模组的一种结构示意图。
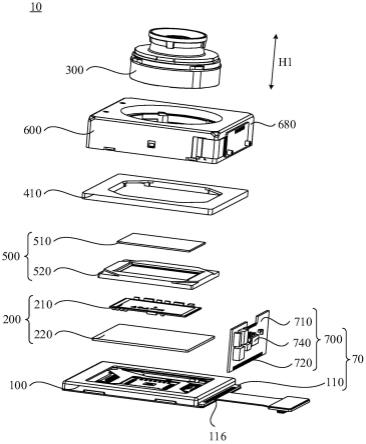
18.图2为图1所示的摄像模组的一种爆炸结构示意图。
19.图3为图2所示的第一防抖组件的一种爆炸结构示意图。
20.图4为图2所示的第一防抖组件中部分结构的结构示意图。
21.图5为图3所示的第一防抖组件中承载部和弹性件的结构示意图。
22.图6为图5所示承载部和弹性件中部分弹性件的放大示意图。
23.图7为图3所示第一防抖组件中垫高支架的结构示意图。
24.图8为图3所示的驱动机构中移动件的结构示意图。
25.图9为图3所示的驱动机构中部分结构的另一结构示意图。
26.图10为图1所示的摄像模组的另一角度结构示意图。
27.图11为图10所示的摄像模组沿aa方向的剖面图。
28.图12为本技术实施例提供的摄像模组的另一爆炸结构示意图。
29.图13为本技术实施例提供的一种电子设备的结构示意图。
具体实施方式
30.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本技术的保护范围。
31.本技术实施例提供一种电子设备,电子设备包括摄像模组,摄像模组包括电路板。
32.请参阅图1和图2,图1为本技术实施例提供的摄像模组的一种结构示意图,图2为图1所示的摄像模组的一种爆炸结构示意图。本技术实施例提供一种摄像模组10,摄像模组10可以用于实现电子设备的拍照、录像、人脸识别解锁或扫码支付等功能。此外,需要说明的是,摄像模组10可以是前置式摄像头,也可以是后置式摄像头,本实施例对此不作限定。以下结合附图具体说明摄像模组10的结构。摄像模组10可以包括图像传感器组件200和镜头300。
33.镜头300的材质可以是玻璃或塑胶等。镜头300内部可设有多层镜片,镜头300可以采集外部光线并可以改变光线的传播路径,并可对光线进行聚焦。如图2所示,摄像模组10还可以包括滤光片组件500,该滤光片组件500可以在镜头300的光轴方向设置于镜头300和图像传感器组件200之间,该滤光片组件500可以包括一层或多层滤光片510及承载滤光片510的滤光片支架520,多层滤光片510会相互矫正过滤光线,以在光线通过镜头300时,多层滤光片510层层过滤杂光(例如红外光),以便于增加摄像模组10的成像效果。示例性地,滤光片510可以为蓝玻璃或其他滤光结构,蓝玻璃可以通过点胶烘烤等方式固定在滤光片支架520上。
34.图像传感器组件200可以在镜头300的光轴方向上与镜头300相对设置,图像传感
器组件200可以包括图像传感器210和图像传感器电路板220,镜头300、图像传感器210和图像传感器电路板220可以沿第一方向h1层叠设置,该第一方向h1可以是摄像模组10的厚度方向,也可以是镜头300的光轴方向,镜头300与图像传感器210可以相互平行。图像传感器210可以但不限于是电荷耦合元件(charge coupled device,简称ccd)、互补金属氧化物半导体(complementary metal oxide semiconductor,简称cmos)等类型的影像传感器。图像传感器210主要用于接收来自镜头300采集的光线,并将光信号转化为电信号,以便于实现摄像模组10的成像需求。图像传感器电路板220可以承载图像传感器210并与图像传感器210电性连接,以为图像传感器210提供电能及控制信号。图像传感器210等元器件可以通过表面贴装技术(surface mounted technology,smt)、芯片贴装(die bonding,d/b)、金线封装(wire bonding,w/b)等工序安装在图像传感器电路板220上。
35.摄像模组10还可以包括电路板70,电路板包括70电路基板110,电路基板110可以为印制电路板(printed circuit board,pcb)或柔性电路板(flexible printed circuit,fpc)或两者的组合,其上设有多个焊盘和多条印刷走线,多个焊盘用于焊接各个电子元件,印刷走线用于将各个电子元件之间的电连接。图像传感器210可以平铺设置于电路基板110上,并且与电路基板110电连接。其中,图像传感器210可以直接或间接连接于电路基板110。
36.电路板70还包括驱动转接板700,驱动转接板700可以竖直设置于所述电路基板110,并且与所述电路基板110电连接。相比于图像传感器210平铺设置于电路基板110,驱动转接板700是竖直设置于所述电路基板110,如垂直或大致垂直于电路基板110,驱动转接板700只需要占用电路基板110水平方向上很小的区域,驱动转接板700上可以容纳更大的驱动芯片和更多的外围电子元件,驱动转接板700即使增大也不会增加电路基板110水平方向的占用区域,充分利用摄像模组10垂直方向上的空间,相比于相关技术中,驱动转接板平铺设置于电路基板上电路板70和摄像模组,本实施例的电路板70和摄像模组10在水平方向的尺寸更小,不会增加电路板70摄像模组10水平方向的尺寸,甚至可以减少电路板70摄像模组10水平方向的尺寸,因为摄像模组10本身具有一定的高度,摄像模组10充分利用该高度对应的空间设置驱动转接板700,使摄像模组10垂直方向的尺寸基本不影响,进而不增加摄像模组10的尺寸,甚至减少摄像模组10的尺寸,有利于摄像模组10的小型化。
37.其中,所述电路基板110设有第一焊盘116,所述驱动转接板700的边缘设有第二焊盘720,所述第二焊盘720与所述第一焊盘116焊接连接,以使驱动转接板700和电路基板110电连接。驱动转接板700可以通过其设置的第二焊盘720直接焊接于电路基板110上的第一焊盘116,从而使驱动转接板700和电路基板110既可以实现电路连接,又可以实现物理连接。
38.其中,所述驱动转接板包括相对的第一表面710和第二表面(图中未示出),所述驱动转接板700还包括控制芯片740,所述控制芯片740设置于所述第一表面710,所述驱动转接板700包括朝向所述电路基板110的侧边,侧边设置于第一表面710和第二表面之间,所述第二焊盘720可以设置于所述侧边。
39.第二焊盘720可以从侧边与第一表面710邻接的边缘延伸至侧边与第二表面邻接的边缘,即第二焊盘720可以横穿整个侧边,充分利用侧边的空间,增大与电路基板110的第一焊盘116的接触面积,提高第一焊盘116和第二焊盘720的电连接稳定性、以及物理连接的牢固度。第二焊盘720可以与设置于第一表面710的印刷走线电连接,从而与驱动转接板700
上的电子元件(如驱动芯片或周围电路)电连接。第二焊盘720也可以与设置于第二表面的印刷走线电连接,从而与驱动转接板700的电路电连接,进而将驱动转接板700的电路与电路基板110连接。可选的,第二焊盘720也可以不横穿整个侧边,如从侧边与第一表面710的边缘延伸至侧边的中间区域,或者从侧边与第二表面的边缘延伸至侧边的中间区域。
40.可选的,第二焊盘720也可以设置在第一表面710或第二表面,驱动转接板700设置于电路基板110上时,第二焊盘720可以通过焊锡与电路基板110上的第一焊盘116电连接。
41.其中,所述电路基板110包括相互连接的连接部114和主体部115,所述图像传感器210设置于所述主体部115并与主体部115电连接,所述连接部114用于与外部部件电连接,从而将电路基板110上的图像传感器210和驱动转接板700与外部部件电连接。外部部件可以为主板、电池或其他功能电路板。
42.所述驱动转接板700设置在所述图像传感器210朝向所述连接部114的一侧,如设置在主体部115朝向连接部114的一侧。考虑到连接部114设置于主体部115的一侧,主体部115和连接部114之间需要留有余量,驱动转接板700正好可以设置在主体部115朝向连接部114一侧,充分利用主体部115和连接部114之间的余量。另外,驱动转接板700也需要通过连接部114与外部部件电连接,驱动转接板700设置在主体部115朝向连接部114一侧,可以优化与连接部114连接的走线,走线更短更方便。
43.可以理解的是,驱动转接板700焊接于电路基板110上,驱动转接板700上的元件损坏后只用更换驱动转接板700就可以了,不用报废整个摄像模组10,尤其是摄像模组10中最昂贵的图像传感器210、镜头300和驱动机构不用报废,可以重复利用。
44.在一些示例中,连接部114还可以包括专门的连接器如板对板连接器(board-to-board connectors,btb连接器),连接器用于外部部件如主板快速连接。
45.在一些示例中,主体部115可以pcb,连接部114可以为fpc,在其他一些示例中,主体部115和连接部114可以均为pcb或fpc。
46.摄像模组10还可以包括第一防抖组件100,第一防抖组件100可以沿镜头300的光轴方向设置于图像传感器210远离镜头300的一侧,第一防抖组件100可与图像传感器210连接以驱动图像传感器210运动。第一防抖组件100可以用于改善摄像模组10因用户在使用过程中发生抖动而产生的成像效果,以使得图像传感器210的成像效果能够满足用户的使用需求。第一防抖组件100可以提供驱动力,以驱动图像传感器210运动。
47.基于光学防抖技术,摄像模组10内或者与摄像模组10位于同一电子设备内的陀螺仪或加速度计等传感器可以检测到镜头300的抖动以生成抖动信号,并将该抖动信号传递至电子设备和/或摄像模组10的处理芯片,电子设备和/或摄像模组10的处理芯片可以计算出第一防抖组件100需要补偿的位移量,以使得第一防抖组件100可以根据镜头300的抖动方向及其位移量对镜头300进行补偿,从而改善或摄像模组10因用户在使用过程中发生抖动而产生的成像效果。
48.其中,请结合图2并请参阅图3和图4,图3为图2所示的第一防抖组件的一种爆炸结构示意图,图4为图2所示的第一防抖组件中部分结构的结构示意图。第一防抖组件100可以包括承载板110、驱动机构120和底板130。需要说明的是,承载板110可以为上述实施例中的电路基板的主体部,也可以为另外设置的部件。
49.底板130可以作为第一防抖组件100的载体,承载板110和驱动机构120都直接或间
接设置于底板130上。
50.承载板110可以作为图像传感器210的线路板并承载图像传感器210,即承载板110为图像传感器电路板220,承载板110也可以作为图像传感器210的线路板的载体,即承载板110上设置图像传感器电路板220和图像传感器210。请结合图5,图5为图3所示的第一防抖组件中承载部和弹性件的结构示意图。承载板110可以包括间隔设置的活动件111和固定件112,承载板110的固定件112可以与底板130连接并固定不动,活动件111可以承载图像传感器210(或图像传感器组件200),图像传感器210可以直接或间接连接于活动件111上。固定件112可以套设在活动件111的外周缘,固定件112与活动件111之间可以形成间隙以使得活动件111可以相对固定件112运动。图像传感器210(或图像传感器组件200)可以直接或间接连接于该活动件111上并随活动件111的运动而同步运动。
51.可以理解的是,活动件111上可以设有第一电连接端,该第一电连接端可以与图像传感器210电性连接。固定件112上可以设有第二电连接端,该第二电连接端可以与摄像模组10的驱动转接板700或摄像模组10外的外部电路电性连接。当第一电连接端和第二电连接端通过电连接件电性连接时,图像传感器210可以通过第一电连接端、电连接件和第二电连接端与驱动转接板700电性连接,该驱动转接板700可以将图像传感器210的电信号引出至第一防抖组件100而与摄像模组10或电子设备的电路板、电源等部件电性连接。
52.可以理解的是,由于固定件112可以与底板130连接而固定不动,从而,与固定件112的第二电连接端电连接的驱动转接板700也不需要随移动件121或活动件111运动,驱动转接板700不需要进行弯折后焊接,本技术实施例的驱动转接板700的焊接工艺简单,尺寸较小。
53.承载板110可以在镜头300的光轴方向上与驱动机构120相对设置。驱动机构120可以设置于承载板110的一侧。例如,如图3所示,驱动机构120可以设置在承载板110远离底板130的一侧,以使得驱动机构120可以在承载板110的上方驱动承载板110运动。当然,驱动机构120也可以设置在承载板110的下方一侧,例如设置在承载板110和图像传感器组件200的下方一侧,以使得驱动机构120可以在承载板110和图像传感器组件200的下方驱动承载板110运动。本技术实施例对驱动机构120的设置位置不进行具体的限定。
54.其中,第一防抖组件100还可以包括一个或多个弹性件113。一个或多个弹性件113可以设置于活动件111和固定件112之间,例如设置于活动件111的外周缘及固定件112的内周缘之间。每一弹性件113的第一端a1可以与固定件112连接并固定不动、第二端a2可以与活动件111连接并随活动件111运动。一个或多个弹性件113可以为活动件111提供与其运动方向相反的弹性作用力以牵扯活动件111的运动,弹性件113提供的弹性作用力及驱动机构120提供的驱动力可以共同作用于活动件111,以使得活动件111可以稳定地停留在某一位置,从而使得活动件111及图像传感器210的防抖控制更精准。
55.可以理解的是,弹性件113可以采用具有弹性恢复力的材质制备。
56.示例性地,如图5所示,第一防抖组件100可以包括四个弹性件113,每一弹性件113可以为一组悬丝线路(trace suspention assembly,tsa),多组悬丝线路围绕移动件121设置。相关技术中,承载板的固定件和活动件通过fpc模组连接,在图像传感器进行运动时,fpc模组造成的反力非常大,弯折后的一致性也很难保证,这样图像传感器在移动时就容易产生倾斜,进而影响摄像模组的生产良率。本实施例中,固定件112和活动件111通过多组悬
丝线路连接,弹性件113采用tsa技术,弹性件113的悬丝线路采用曝光蚀刻工艺,保证了悬丝线路的弹性系数的一致性。这样弹性件113的一致性就好,可以提升第一防抖组件100的良率。
57.其中,为了简化第一防抖组件100、摄像模组10或电子设备的电路设置,一个或多个弹性件113可以是导体材质制备的具有导电性的电连接件。即弹性件113一端用于与图像传感器210电连接、另一端用于与外部电路电连接,以使图像传感器210和外部电路电连接。例如,弹性件113可以通过热压焊接等方式和图像传感器电路板220的焊盘(pad)电连接。
58.示例性地,活动件111上可以设有与图像传感器210直接或间接电连接的第一电连接端,固定件112上可以设有与外部电路直接或间接电连接的第二电连接端,弹性件113可以分别与第二电连接端和第一电连接端直接或间接电连接,以使得外部电路可通过第二电连接端、弹性件113、第一电连接端与图像传感器210直接或间接电连接。
59.可以理解的是,该第一电连接端可以但不限于是活动件111上的焊盘结构,该第二电连接端可以但不限于是固定件112上的焊盘结构。外部电路可以但不限于通过驱动转接板700与第二电连接端电连接。
60.可以理解的是,该外部电路既可以为图像传感器210提供电源,该外部电路也可以为图像传感器210传输控制信号,以使得摄像模组10的控制芯片、电子设备1的控制芯片可以控制图像传感器210。
61.本技术实施例的第一防抖组件100中,外部电路可以通过弹性件113与图像传感器210电性连接,弹性件113既可以作为弹性阻尼件,也可以作为电连接件,弹性件113实现复用,第一防抖组件100不需要额外设置柔性电路板为图像传感器210供电,从而本技术实施例的弹性件113可以简化第一防抖组件100的电路设置,实现第一防抖组件100的小型化设计。
62.请结合图6,图6为图5所示承载部和弹性件中部分弹性件的放大示意图。每组悬丝线路可以包括多根悬丝线1132,多根悬丝线1132并排设置。多根悬丝线1132不仅可以将固定件112和活动件111物理连接,还可以实现固定件112和活动件111上的电路电连接。每组悬丝线路中的多根悬丝线1132可以间隔设置,即相邻两根悬丝线1132之间间隔实现电路隔离,不影响多根悬丝线1132传输电源或信号。
63.可选的,弹性件113还可以包括但不限于各种弹簧。每一弹性件113可以包括一个或多个子弹性件,每一弹性件113可以由多根弹性丝螺旋形成,此时,弹性件113的第一端a1可以是多根弹性丝共同形成的一端部,第二端a2可以是多根弹性丝共同形成的另一端部。当然,实际生产中,每一弹性件113也可以仅由一根弹簧形成。本技术实施例对弹性件113的具体结构不进行限定,凡是可承受活动件111在驱动机构120带动下运动产生的作用力并可具有弹性恢复力的弹性件113的结构,均在本技术实施例的保护范围内。
64.可以理解的是,每一弹性件113的第一端a1在活动件111上的投影可与其第二端a2错开设置,例如二者分布在活动件111的不同侧边上。每一弹性件113分别连接固定件112的一侧边及与该侧边对应的活动件111的另一侧边。每一弹性件113可以形成扭簧结构,多个弹性件113对活动件111的牵扯力较大,可以提高活动件111的稳定性。
65.可以理解的是,如图5所示,每一弹性件113可以包括顺次连接的第一弹性部b1、第一拐角部b2和第二弹性部b3,该第一弹性部b1可以连接于固定件112,第二弹性部b3可以连
接于活动件111,第一弹性部b1和第一拐角部b2的第一连线与第一拐角部b2和第二弹性部b3的第二连线可呈预设夹角,该预设夹角可以但不限于为九十度。本技术实施例的弹性件113包括上述三个部分,弹性件113可以形成幅度较大的扭簧结构,弹性件113对活动件111的牵扯力更大,弹性件113可以进一步保证活动件111的稳定性。
66.为了进一步提高活动件111的稳定性,承载板110上的多个弹性件113可以顺次围绕活动件111的外周缘设置。例如,如图5所示。多个弹性件113可以顺时针环绕活动件111的外周缘设置,多个弹性件113可以按照第一端、第二端、第一端、第二端
……
的顺序顺时针依次排列。当然,多个弹性件也可以逆时针环绕活动件111的外周缘设置,此时,多个弹性件113可以按照第一端、第二端、第一端、第二端
……
的顺序逆时针依次排列。
67.在相邻的两个弹性件113中,其中一个弹性件113(例如在前的弹性件113)的第二端a2可与另一个弹性件113(例如再后的弹性件113)的第一端a1在活动件111上的投影可以相邻且可位于活动件111的同一侧边上。可以理解的是,此处的相邻可以是指前一个弹性件113的第一端a1与后一个弹性件113的第二端a2之间的距离可处于一较小的预设范围内,以使得相邻的两个弹性件113的弹性扭力可以覆盖活动件111的整条侧边,活动件111的稳定性更好。
68.其中,当固定件112为矩形框结构、活动件111为矩形板结构时,相应的,承载板110可以包括四个弹性件113,从而,每一弹性件113分别连接固定件112的一侧边及与该侧边对应的活动件111的相邻侧边,每一弹性件113可包括一组悬丝线路,一方面,一组悬丝线路可为活动件111的运动提供牵引力而提高活动件111的稳定性;另一方面,一组悬丝线路也可以避免活动件111的运动幅度过大而使得弹性件113与活动件111分离。
69.需要说明的是,以上仅为本技术实施例的弹性件113与活动件111、固定件112的一种示例性连接方式。弹性件113的具体连接方式并不局限于上述说明,例如弹性件113还可以直接连接固定件112的一边框及其对应的活动件111的侧边。本技术实施例对弹性件113的具体连接方式不进行限定。
70.需要说明的是,本技术实施例的第一防抖组件100的具体结构并不局限于上述实施例的说明。例如,第一防抖组件100还可以在承载板110的上下两侧设置弹性结构以进一步提高图像传感器210的稳定性。再例如,第一防抖组件100还可以采用其他的驱动方式使得图像传感器210可以实现其他方向的运动。本技术实施例对第一防抖组件100的具体结构不进行限定。
71.可以理解的是,图像传感器210、活动件111与移动件121可以悬置于底板130上,当驱动机构120驱动活动件111移动时,活动件111在运动过程中容易产生倾斜,影响了拍摄的图像质量。
72.在一些实施例中,如图3所示,第一防抖组件100还可以包括垫高支架140,垫高支架140设置于底板130和活动件111之间,可以将活动件111抬高,弹性件113可以产生弹性回复力从而将活动件111贴设于垫高支架140,垫高支架140连接于底板130,移动件121、活动件111和图像传感器210在运动过程中相互之间可以保持相对静止,可以防止使图像传感器210在运动过程中产生倾斜,提高防抖效果,提高拍摄的图像质量。
73.请结合图7,图7为图3所示第一防抖组件中垫高支架的结构示意图。其中,垫高支架140可以包括垫高基板142和至少三个凸起144,所有凸起144间隔设置于垫高基板142朝
向活动件111一侧,所有凸起144朝向活动件111的表面处于同一平面,至少三个凸起144抵接于活动件111。至少三个凸起144的表面可以决定一个平面,从而使设置在至少三个凸起144上的活动件111处于一平面上,保证了活动件111的稳定性。同时,活动件111通过多个凸起144设置于垫高支架140,活动件111相对垫高支架140运动时,不需要与整个垫高基板142相对运动,只需要与多个凸起144相对运动,减少垫高支架140对活动件111运动的影响。每一个凸起144的表面可以为光滑面,活动件111与多个凸起144接触的表面也可以为光滑面,从而使活动件111可以方便的相对多个凸起144运动。
74.其中,垫高支架140可以采用蚀刻工艺形成,垫高支架140可以有很好的平面度。例如,垫高支架140的每一凸起144抵接活动件111的表面可以采用蚀刻工艺形成,从而使每一个凸起144的表面具有很好的平面度和光滑度。又例如,垫高基板142上未设置凸起144,垫高基板142直接与活动件111抵接,垫高基板142抵接活动件111的表面可以采用蚀刻工艺形成,从而使垫高基板142的表面具有很好的平面度和光滑度。
75.多个凸起144可以设置在垫高基板142的不同区域。例如,多个凸起144可以设置在垫高基板142不同的边缘位置,多个凸起144也可以设置在垫高基板142中间的不同位置。
76.可选的,垫高支架140和活动件111之间可以设置超滑结构,超滑结构的摩擦系数可以达到10-3,垫高支架140和活动件111通过超滑结构滑动连接,可以提高垫高支架140和活动件111之间的滑动效果,降低驱动机构120的功耗,降低驱动机构120的要求。其中,超滑结构可以安装于与垫高支架140,也可以安装于活动件111。垫高支架140和活动件111之间设置超滑结构后,活动件111朝向垫高支架140一侧的表面的光滑要求可以降低,例如活动件111朝向垫高支架140一侧的表面可以不设置镀膜,垫高支架140朝向活动件一侧的表面的光滑要求可以降低。在一些示例中,垫高支架140朝向活动件111一侧设有多个凸起144,至少三个凸起144朝向活动件111的表面可以设置超滑结构,凸起144可以不用蚀刻工艺形成,降低了凸起144形成的难度,降低了成本,同时凸起144和活动件111的滑动效果更好。
77.需要说明的是,因为垫高支架140将活动件111抬高,固定件112高度不变,同时活动件111和固定件112通过弹性件113连接,为了更好地设置移动件121,可以将移动件121设置于活动件111远离底板130的一侧,从而可以不影响固定件112和活动件111的设置。
78.可选的,活动件111包括层叠设置的金属层和绝缘层,绝缘层背离基板的一侧用于承载摄像模组的图像传感器,金属层设置于绝缘层朝向基板的一侧。活动件111的底面可以设置一层金属层如钛铜,从而使活动件111具有很好的弹性。金属层上设置一层绝缘层,方便在绝缘层上设置图像传感器。
79.请继续参阅图3和图4,驱动机构120可以包括移动件121和多个形变件122,移动件121可与活动件111直接或间接连接,从而,移动件121、活动件111及设置于活动件111上的图像传感器210(或图像传感器组件200)可以形成一整体。每一形变件122的一端可与固定件112直接或间接连接、另一端可与移动件121直接或间接连接,多个形变件122在通电状态下可发生形变以带动移动件121、活动件111和图像传感器210形成的整体运动,以使得移动件121、活动件111和图像传感器210可以同步运动。例如多个形变件122在通电状态下可发生形变以带动移动件121、活动件111、图像传感器210沿垂直于镜头300的光轴方向移动或围绕镜头300的光轴方向转动,图像传感器210可以在第一防抖组件100的作用下实现x轴、y轴或xoy平面内转动。
80.可以理解的是,镜头300的光轴方向可以是第一方向h1,该第一方向h1可以是竖直方向,例如是坐标轴中的z轴方向。垂直于镜头300的光轴方向可以是第二方向,该第二方向可以是水平面内的任一水平方向,例如是坐标轴中的x轴方向或y轴方向。围绕镜头300的光轴方向,可以是垂直于镜头300的光轴的平面内的任一方向,例如是坐标轴中的xoy平面内的任一方向。
81.可以理解的是,多个形变件122的材料为形状记忆合金(shape memory alloys,sma)制作形成,形状记忆合金在通电状态下可以使得形状记忆合金被加热并使其变形,变形时可以使得多个形变件122的长度发生变化。当对多个形变件122进行通电、或者对多个形变件122传输不同大小的电流时,多个形变件122的长度可以发生变化,由于每一形变件122的一端随承载板110的固定件112固定不动、另一端随移动件121运动,从而,长度发生变化的多个形变件122可以带动移动件121运动,移动件121也可带动与之直接或间接连接的活动件111和图像传感器210运动。
82.本技术实施例的第一防抖组件100中,驱动机构120包括移动件121和多个形变件122,移动件121与承载板110的活动件111连接,每一形变件122的一端与移动件121连接、另一端与承载板110的固定件112连接,从而多个形变件122发生形变时可以带动移动件121运动,移动件121可以带动活动件111及设置于活动件111上的图像传感器210运动,从而,第一防抖组件100可以实现图像传感器210的防抖功能。同时,形变件122的两端分别与固定件112和移动件121连接,形变件122不需要占据活动件111的空间,形变件122不会影响活动件111上电路的分布,可以降低形变件122对活动件111上电路的影响。并且,移动件121与承载板110相互独立,在生产装配工艺中,移动件121和承载板110可以分别进行模块化生产,以提高移动件121和承载板110的适应性。需要说明的是,移动件121与承载板110也可以采用同一套生产工艺一起生产。本技术实施例对移动件121与承载板110的具体制备过程不进行限定。
83.其中,驱动机构120还可以包括多个可动端123和多个固定端124。多个可动端123可以设置于移动件121,多个固定端124可以设置于固定件112。一个形变件122的一端可以直接或间接连接于一个可动端123、另一端可以直接或间接连接于一个固定端124。形变件122在通电状态下长度发生改变时,与形变件122连接的可动端123可随形变件122的长度的变化而随移动件121一起移动,与形变件122连接的固定端124则随固定件112一起固定而不移动。
84.可以理解的是,一个或多个可动端123可以间隔地设置并连接于移动件121上,多个可动端123中的两个或多个还可以不间隔设置而相邻(或相互连接)设置。同理,一个或多个固定端124可以间隔地设置并连接于固定件112上(例如间隔设置于固定件112的正面),多个固定端124中的两个或多个也可以不间隔设置而相邻(或相互连接)设置。本技术实施例对多个可动端123、多个固定端124的设置方式不进行具体的设置。
85.示例性地,如图4所示,驱动机构120可以包括间隔设置的两个可动端123和间隔设置的两个固定端124。例如,两个可动端123和两个固定端124可以形成四边形结构,两个可动端123可以位于四边形结构的一条对角线上,两个固定端124可以位于四边形结构的另一条对角线上,两个可动端123和两个固定端124可以形成四边形结构的四个顶点。此时,第一防抖组件100还可以对应设置四个形变件122,四个形变件122可以对应四边形结构的四条
边设置。基于四边形结构容易变形的特性,当形变件122发生形变时,形变件122更容易受到位于顶点处的可动端123及固定端124的影响而使得四边形结构发生改变从而更容易带动活动件111及设置于活动件111上的图像传感器210运动。
86.可以理解的是,一个或多个可动端123可以一体成型于移动件121上,一个或多个固定端124也可以一体成型于固定件112上。当形变件122通过缠绕、卡嵌、焊接等方式连接于可动端123或固定端124,相较于形变件122直接连接于固定件112的方案而言,本技术实施例形变件122与可动端123、固定端124连接的过程中,不容易对固定件112造成损坏,不易损坏固定件112上的电路走线。
87.可以理解的是,可动端123、固定端124的数量可等于形变件122的数量的一半,以使得一个可动端123可以连接两条形变件122的端部,一个固定端124也可以连接两条形变件122的端部,从而,本技术实施例的驱动机构120可以设置较少的可动端123和固定端124。
88.可以理解的是,第一防抖组件100、摄像模组10或电子设备还可以包括驱动控制芯片,该驱动控制芯片可以设置于承载板110的固定件112上并形成使得形变件122产生形变的驱动电路。或者,固定件112上还可以单独设置驱动电路,驱动控制芯片可以通过上述的驱动转接板700而与固定件112上的驱动电路实现电连接。该多个可动端123、多个固定端124中的至少一个可以是导电器件,以使得驱动电路可以通过多个可动端123,或者通过多个固定端124,或者同时通过多个可动端123和多个固定端124与形变件122电性连接,从而,驱动控制芯片可为形变件122提供驱动电流。
89.可以理解的是,该可动端123、固定端124可以具有一定的高度,以使得可动端123、固定端124可将承载板110与移动件121、形变件122隔离开。从而,多个形变件122发生形变时不易与承载板110接触,可以避免承载板110对形变件122的形变干扰;同时,也可以防止承载板110上的电路与形变件122接触而短路。
90.可选的,驱动机构120还可以包括垫高件150,垫高件150设置于移动件121和活动件111之间,垫高件150可以将移动件121垫高,从而使与移动件121连接的可动端123也抬高,使得移动件121和固定件112间隔开。
91.第一防抖组件100可以设置多个可动端123和固定端124,形变件122通过该可动端123与固定端124实现与承载板110的固定件112及驱动机构120的移动件121连接,形变件122的连接工艺更简单,不会影响固定件112上的电路走线;同时,可动端123和固定端124可作为导电器件实现形变件122的供电,可以简化形变件122的供电电路布置,实现第一防抖组件100的小型化设计。
92.其中,多个形变件122可以环绕移动件121设置,以使得形变件122可以更好地控制移动件121的移动。示例性地,请结合图8,图8为图3所示的驱动机构中移动件的结构示意图。移动件121可以包括中间部1215、第一延伸部1217和第二延伸部1218,中间部1215可以大致为矩形框结构。第一延伸部1217和第二延伸部1218设置于中间部1215相对的两个对角处。中间部1215位于活动件111上方,第一延伸部1217从中间部1215的一个边角延伸至固定件112上方,第二延伸部1218从中间部1215的另一个边角延伸至固定件112上方,第一延伸部1217和第二延伸部1218可以朝着远离彼此的方向延伸,第一延伸部1217和第二延伸部1218上分别设置一个可动端123。
93.固定件112可为矩形框结构,活动件111可位于固定件112中空区域。当驱动机构
120包括两个可动端123和两个固定端124时,两个可动端123可以设置于移动件121第一延伸部1217和第二延伸部1218,两个固定端124可以设置于固定件112相对的两个端部,每一个可动端123位于两个固定端124之间,每一个固定端124位于两个可动端123之间。从而,两个可动端123可以位于移动件121的对角线上,两个固定端124可以位于移动件121的对角线上。
94.第一防抖组件100包括四个形变件122,四个形变件122位于固定件112的四个侧边上,具体的,每一个形变件122相对固定件112的一个侧边设置,每一个形变件122的一端与一可动端123连接、另一端与固定端124连接。可以理解的是,四个形变件122相互配合可以使得移动件121运动,例如,可使移动件121沿垂直于镜头300的光轴方向移动或围绕镜头300的光轴方向转动。
95.为了方便理解本实施例中通过形变件122控制图像传感器210的运动,下面举例说明。请结合图9,图9为图3所示的驱动机构中部分结构的另一结构示意图。四个形变件122可以包括第一形变件1221、第二形变件1222、第三形变件1223和第四形变件1224。
96.若对第一形变件1221通电使其变短收缩、和/或对第三形变件1223通电使其变长放松时,第一形变件1221、第三形变件1223可带动移动件121、活动件111和图像传感器210沿x轴方向向右平移。若对第一形变件1221通电使其变长放松、和/或对第三形变件1223通电使其变短收缩时,第一形变件1221、第三形变件1223可带动移动件121、活动件111和图像传感器210沿x轴方向向左平移。
97.若对第二形变件1222通电使其变短收缩、和/或对第四形变件1224通电使其变长放松时,第二形变件1222、第四形变件1224可带动移动件121、活动件111和图像传感器210沿y轴方向向下平移。若对第二形变件1222通电使其变长放松、和/或对第四形变件1224通电使其变短收缩时,第二形变件1222、第四形变件1224可带动移动件121、活动件111和图像传感器210沿y轴方向向上平移。
98.若同时对第一形变件1221和第三形变件1223通电使其变短时,第一形变件1221和第三形变件1223可带动移动件121、活动件111和图像传感器210沿移动件121对角线在xoy平面内顺时针转动。若同时对第一形变件1221和第三形变件1223通电使其变长时,第一形变件1221可带动移动件121、活动件111和图像传感器210沿移动件121对角线在xoy平面内逆时针转动。
99.若同时对第二形变件1222和第四形变件1224通电使其变短时,第二形变件1222和第四形变件1224可带动移动件121、活动件111和图像传感器210沿移动件121对角线在xoy平面内逆时针转动。若同时对第二形变件1222和第四形变件1224通电使其变长时,第二形变件1222和第四形变件1224可带动移动件121、活动件111和图像传感器210沿移动件121对角线在xoy平面内顺时针转动。
100.本技术实施例的第一防抖组件100中,第一形变件1221、第二形变件1222、第三形变件1223、第四形变件1224围绕移动件121设置,多个形变件122可以对称、均匀地控制移动件121的移动,移动件121的运动距离、运动方向更可控,更便于第一防抖组件100计算图像传感器210的防抖参数。同时,多个形变件122可以带动移动件121和图像传感器210实现x轴、y轴的平移防抖,也可以实现xoy平面内的旋转防抖,第一防抖组件100的适应可以实现多种抖动场景下的防抖补偿,摄像模组10可以实现多种抖动场景下的防抖补偿,摄像模组
10的适应性更优。
101.需要说明的是,本技术实施例的多个形变件122除了驱动移动件121、活动件111和图像传感器210沿垂直于镜头300的光轴方向移动或者围绕镜头300的光轴方向转动外,还可以驱动移动件121、活动件111和图像传感器210以其他的方式运动。例如,多个形变件122还可以驱动移动件121、活动件111和图像传感器210沿镜头300的光轴方向上下运动;或者,多个形变件122还可以驱动移动件121、活动件111和图像传感器210围绕垂直于镜头300的光轴方向翻转,此时,多个形变件122和移动件121的设置方式可相应的改变,例如第一防抖组件100和图像传感器组件200整体沿镜头的光轴方向设置,第一防抖组件100和镜头300之间设置有一反射镜,反射镜能够将从镜头300进入的光线偏转90度后射入传感器组件200。本技术实施例对多个形变件122驱动移动件121、活动件111和图像传感器210运动的具体方式不进行限定。
102.可以理解的是,移动件121的框体的结构可与承载板110的活动件111的大小相适应,以使得移动件121可以承载活动件111。移动件121的第一延伸部1217和第二延伸部1218在承载板110上的投影可以位于承载板110的固定件112上,以使得两个可动端123、两个固定端124围合形成的四边形结构可与固定件112的大小相适应,从而多个形变件122的长度可以较长,多个形变件122带动移动件121、活动件111和图像传感器210的运动行程更大。
103.本技术实施例的移动件121设置第一延伸部1217和第二延伸部1218,一方面,第一延伸部1217和第二延伸部1218可以承载两个可动端123;另一方面,第一延伸部1217和第二延伸部1218使得形变件122的长度更大,形变件122带动移动件121、活动件111和图像传感器210的运动行程更大,第一防抖组件100对图像传感器210的防抖补偿可以更大。
104.其中,驱动转接板700可以与第一防抖组件100电连接,驱动转接板700能够驱动第一防抖组件100,以使第一防抖组件100驱动图像传感器210移动,以实现图像传感器的防抖,进而实现摄像模组10的防抖。示例性地,驱动转接板700可以与形变件122电连接,以控制形变件122的形变,进而实现摄像模组10的防抖。
105.驱动转接板700竖直设置于电路基板110或底板130上,可以减小摄像模组的尺寸,单独设计一块驱动转接板700,可以把驱动ic和其它一些电子元件都可以放在驱动转接板700上,这样有利于摄像模组的堆叠。另外,考虑到摄像模组10设置在电子设备1的主板上时,主板上要对应摄像模组10开设容纳孔,摄像模组10设置于主板上的容纳孔内,摄像模组10的尺寸越小,主板开设的容纳孔的面积就越小,主板能够排布电路的区域就越大,方便主板合理排布电路。同时,主板的尺寸越小,其他部件排布的空间就更大,例如可以设置更大尺寸更大容量的电池。增加对应的智能手机的续航时间,改善智能手机现在的痛点问题如续航问题。
106.可以理解的是,第一防抖组件100还可以包括一个防抖壳体160,防抖壳体160可以设置在固定件112上,并罩设驱动机构120和活动件111,以保护驱动机构120和活动件111。图像传感器组件200、滤光片组件500也可以设置在防抖壳体160内。防抖壳体160中间具有开口,开口正对镜头300,以使镜头300采集的光线可以通过该开口射到滤光片510和图像传感器210。防抖壳体160可以固定件112上安装于电路基板110,防抖壳体160具有中空区域,图像传感器210和驱动机构120设置于防抖壳体160的中空区域内。移动件121活动连接于电路基板110,移动件121承载图像传感器210,每一形变件122的一端与电路板70(如电路基板
110)连接、另一端与移动件121连接,每一形变件122电连接驱动转接板700,驱动转接板700能够给至少一个形变件122通电,以使至少一个形变件122在通电状态下可发生形变以带动移动件121和图像传感器210运动。
107.可选的,驱动转接板700可以贴设于防抖壳体160,即驱动转接板700的一侧贴设于防抖壳体160,既可以让防抖壳体160支撑驱动转接板700,又可以使驱动转接板700和防抖壳体160的结构更紧凑。需要说明的是,驱动转接板700和防抖壳体160可以仅贴设,也可以固定连接,例如通过设置粘结胶将驱动转接板700和防抖壳体160粘结起来,又例如通过焊锡将驱动转接板700和防抖壳体160焊接连在一起。具体的,驱动转接板700和防抖壳体160上分别设置用于连接在一起的焊盘,焊盘可以仅用于驱动转接板700和防抖壳体160的焊接,焊盘还可以用于驱动转接板700和防抖壳体160内图像传感器210电连接。
108.可选的,摄像模组10还可以包括镜头壳680,镜头300至少部分安装于镜头壳680内,镜头300设置于图像传感器210背离电路基板110一侧,驱动转接板700可以贴设于镜头壳680,既可以让镜头壳680支撑驱动转接板700,又可以使驱动转接板700和镜头壳680的结构更紧凑。示例性地,镜头壳680可以叠设于防抖壳体160上方,驱动转接板700设置于镜头壳680和防抖壳体160的同一侧,镜头壳680和防抖壳体160朝向驱动转接板700的一侧可以齐平,则驱动转接板700可以同时贴合于镜头壳680和防抖壳体160。镜头壳680和防抖壳体160朝向驱动转接板700的一侧也可以不齐平,镜头壳680和防抖壳体160中得一个朝驱动转接板700凸出,驱动转接板700可以贴设于镜头壳680和防抖壳体160中凸出的一个。在其他一些示例中,镜头壳680可以盖设防抖壳体160,即防抖壳体160设置在镜头壳680内,对应的,驱动转接板700贴设于镜头壳680。
109.可选的,驱动转接板700可以包括检测单元和控制芯片,检测单元与形变件122电连接,并用于获取形变件122的电阻值;控制芯片与检测单元电连接,并用于根据电阻值控制通过形变件122的电流。利用形变件122(sma金属丝)可以具有热缩冷涨的特性,检测单元获取形变件122的电阻值,控制芯片根据检测单元获取的电阻值可以得到形变件122的长度,进而得到图像传感器的位置,然后控制形变件122的电流,改变形变件122的长度,进而改变图像传感器的位置,实现图像传感器的防抖。利用形变件122的电阻反馈进行控制,不需要霍尔传感器(hallsensor),成本更低,结构更简单。在相同体积的第一防抖组件100中,可以组装更长的形变件122,第一防抖组件100可以提供更大的工作行程,提供更大的防抖角度。
110.请继续参阅图2和图3并请参阅图10和图11,图10为图1所示的摄像模组的另一角度结构示意图,图11为图10所示的摄像模组沿aa方向的剖面图。本技术实施例的摄像模组10还可以包括对焦组件600,该对焦组件600可以与镜头300直接或间接连接,对焦组件600可以驱动镜头300移动。例如,对焦组件600可以驱动镜头300沿镜头300的光轴方向移动。
111.对焦组件600可以设置于第一防抖组件100上,例如设置在第一防抖组件100的防抖壳体160上,对焦组件600可以在镜头300的光轴方向与第一防抖组件100相对设置,对焦组件600和第一防抖组件100可以沿第一方向h1层叠设置。在一些实施例中,对焦组件600和第一防抖组件100之间还可以设置机械限位支架410,以更好的支撑对焦组件600。
112.对焦组件600可以包括镜头壳680、对焦驱动机构,镜头壳680可以作为对焦组件600的安装壳体,对焦驱动机构可以设置于镜头壳680内,对焦驱动机构可以驱动镜头300移
动以实现对焦功能。在一些实施例中,请参阅图12,图12为本技术实施例提供的摄像模组的另一爆炸结构示意图。其中,对焦组件600可以包括承载件610、磁性件620和导电件630。
113.承载件610可以承载镜头300,承载件610可以但不限于是镜头300载体。磁性件620可以产生磁场,承载件610可以位于磁场内。导电件630可在垂直于镜头300的光轴方向上与磁性件620相对设置,导电件630在磁性件620的作用下可以产生作用力,该作用力可以使承载件610沿镜头300的光轴方向上下移动。
114.可以理解的是,磁性件620可以但不限定是永磁铁、电磁铁等可以产生磁场的磁性元件。承载件610上可以设有容置槽,磁性件620可以位于该容置槽内。磁性件620可以包括一个或多个子磁性件。例如,磁性件620可以包括四个子磁性件,四个子磁性件可以均匀间隔地围绕镜头300的光轴方向分布在承载件610的周围。相应的,导电件630也可以对应包括多个子导电件,以使得每一子导电件可以与有一个子磁性件相对设置。本技术实施例对磁性件620和承载件610的具体结构不进行限定。
115.可以理解的是,导电件630可以但不限于是线圈结构,外部电源(例如电子设备的电源、驱动转接板700)可以为线圈通电,以使得导电件630可以在磁性件620的作用下产生驱动承载件610沿第一方向h1上下移动的作用力。
116.可选的,对焦组件600还可以包括支架640,该支架640可与摄像模组10的镜头壳680固定连接而不随磁性件620运动。导电件630也可以设置在支架640上,例如支架640上设有凹槽,导电件630可以设置在该凹槽内。镜头壳680可以盖设承载件610和支架640等结构,即承载件610和支架640等结构都设置于镜头壳680内。在其他一些实施例中,镜头壳680还可以盖设图像传感器,即图像传感器也设置在镜头壳680内。
117.可选的,支架640上还可以设有第一方向h1延伸的限位槽,承载件610上还可以设有滚珠结构650,该滚珠结构650可以容置在限位槽内,当导电件630在磁性件620的作用下产生作用力时,该作用力可使承载件610在滚珠结构650的滚动作用下相对支架640沿第一方向h1上下移动。
118.可选的,对焦组件600还可以包括柔性电路板660,该柔性电路板660可以设置于支架640的凹槽内,以便于柔性电路板660与导电件630电性连接,柔性电路板660可为导电件630供电并提供控制电流。可以理解的是,外部电源也可以与柔性电路板660电连接,以使得外部电源通过柔性电路板660为导电件630供电。
119.可选的,对焦组件600还可以包括导磁片670,该导磁片670可以设置于支架640的凹槽内,并为导电件630提供吸附力,以使得导电件630可固定在支架640上。
120.可选的,摄像模组10或电子设备还可以包括第二控制芯片。该第二控制芯片可以与对焦组件600电性连接。第二控制芯片可以监控活镜头300的运动参数,第二控制芯片可以根据监控的运动参数与摄像模组10的抖动参数来实时控制镜头300及承载件610的运动,以便于镜头300的抖动补偿更精准,实现摄像模组10的闭环控制。
121.本技术实施例的对焦组件600通过磁性件620和导电件630相互配合可以使承载件610和镜头300沿竖直方向上下运动,对焦组件600结构简单、占据的空间较小,可以实现摄像模组10的小型化设计。
122.在一些实施例中,可以根据需要选择开环模式的对焦组件,配合类闭环控制芯片,小幅度牺牲对焦速度并维持对焦组件在控制上的稳定度,利用第一防抖组件对图像传感器
的防抖实现较好的拍摄效果,可以降低成本,减小摄像模组的尺寸。
123.可以理解的是,在其他一些实施例中,摄像模组10也可以不设置对焦组件600,摄像模组10为固定焦距的摄像模组10,可以简化摄像模组的结构。例如,摄像模组为辅助摄像模组。
124.需要说明的是,本技术实施例的摄像模组10的具体结构并不局限于上述实施例的说明。例如,摄像模组10除了包括第一防抖组件100、图像传感器组件200、镜头300、对焦组件600外,还可以但不限于包括微云台组件等。本技术实施例对摄像模组10的具体结构不进行限定。
125.可选的,摄像模组还可以包括第二防抖组件,第二防抖组件与镜头连接,第二防抖组件用于调节镜头的运动,以实现镜头的防抖。第二防抖组件可以采用类似上述实施例中磁性件、线圈结构和滚珠结构的结构。例如,设置多对磁性件和线圈结构、以及多组滚珠结构,通过磁性件和线圈结构驱动镜头移动以实现镜头防抖。如可以驱动镜头绕镜头的轴线旋转,可以在垂直镜头轴线的平面翻转等。镜头移动可以改变并修正摄像模组抖动时的光路,达到防抖补偿效果。
126.第二防抖组件可以与驱动转接板电连接,驱动转接板能够驱动第二防抖组件移动,并带动镜头移动。示例性地,第二防抖组件可以直接或间接安装于电路基板,摄像模组可以仅对镜头进行防抖,而不对图像传感器防抖,即仅设置对镜头防抖的第二防抖组件,而不设置对图像传感器防抖的第一防抖组件100,或者摄像模组不仅对镜头防抖,还对图像传感器防抖。镜头防抖和图像传感器防抖可以分开独立控制,也可以同步控制。例如,驱动转接板上的芯片同时连接第二防抖组件和第一防抖组件,通过计算得到分别控制第二防抖组件的参数和控制第一防抖组件的参数,通过两者结合获得更好的防抖效果。
127.其中,第二防抖组件包括镜头防抖壳体,驱动转接板贴设于镜头防抖壳体。驱动转接板和镜头防抖壳体可以仅贴设,也可以固定连接。例如通过设置粘结胶将驱动转接板700和镜头防抖壳体粘结起来,又例如通过焊锡将驱动转接板700和镜头防抖壳体焊接连在一起。具体的,驱动转接板700和镜头防抖壳体上分别设置用于连接在一起的焊盘,焊盘可以仅用于驱动转接板700和镜头防抖壳体的焊接,焊盘还可以用于驱动转接板700和镜头防抖壳体内电路电连接。可选的,第二防抖组件还包括穿设于镜头防抖壳体的连接电路板,连接电路板可以连接镜头防抖壳体内部的电路,如控制镜头移动的电路,连接电路板至少部分设置于镜头防抖壳体的外侧壁上,连接电路板和驱动转接板可以通过焊盘焊接固定,并同时实现电性连接,以使驱动转接板上的芯片可以通过连接电路板控制镜头防抖壳体内的电路,以控制镜头防抖。当然,驱动转接板还可以通过其他方式与镜头防抖壳体内的电路电连接,如通过穿设于镜头防抖壳体的连接线或连接器等。
128.可以理解的是,在一些实施例中,镜头防抖壳体可以为上述实施例中的镜头壳680,在此不再赘述。
129.可以理解的是,驱动摄像模组移动的第一防抖组件和驱动镜头的第二防抖组件分别对摄像模组和镜头进行防抖处理,从而可以实现摄像模组的五轴防抖,具体包括pitch(rx)、yaw(ry)、roll(rz)、left/right(x)、up/down(y)五个轴向补偿防抖,其中rx、ry、rz可以利用陀螺仪传感器辅助防抖,x、y可以使用加速度传感器辅助防抖。示例性地,可以通过xy方向的平移补偿x、y的平移或是rx、ry的翻转即可达到四轴防抖。第一防抖组件可以通过
4根形变件(sma金属线)的拉力可以实现图像传感器的xy平移和在xy平面上的旋转,从而可以补偿x、y的平移或是rx、ry的翻转以及rz防抖。
130.镜头和第二防抖组件可以通过点胶烘烤固定、螺接固定或卡接固定等方式进行固定。
131.可以理解的是,在一些实施例中,摄像模组也可以不设置第二防抖组件,通过第一防抖组件来实现摄像模组的防抖处理,摄像模组的尺寸可以做到很小,应用在一些对摄像模组尺寸要求严格的地方。
132.可选的,摄像模组可以是普通摄像模组也可以是潜望摄像模组。当摄像模组为潜望摄像模组时,摄像模组还可以镜头壳680和棱镜组件,镜头安装于镜头壳680内;棱镜组件安装于镜头壳680内,棱镜组件设置于镜头远离图像传感器一侧,棱镜组件与镜头壳680固定连接。相关技术中,潜望模组的防抖大多是靠控制棱镜移动来防抖,这样棱镜防抖模块的尺寸就会增加,结构也会复杂。本实施例采用机身防抖(即图像传感器防抖),通过图像传感器防抖实现摄像模组的防抖,棱镜就可以固定设置在镜头壳680内,棱镜的尺寸也会减小,不需要设置复杂的棱镜防抖结构,可以降低成本,优化摄像模组的尺寸。
133.本技术实施例还提供一种电子设备,请参阅图13,图13为本技术实施例提供的一种电子设备的结构示意图。电子设备1包括壳体20和摄像模组10,摄像模组10安装于壳体20,摄像模组10为上述任意一个实施例的摄像模组10,在此不再赘述。
134.电子设备还包括驱动机构,驱动机构与摄像模组连接,用于驱动摄像模组在壳体内和壳体外之间移动。摄像模组可以为弹出式摄像模组,当电子设备需要使用摄像模组时,驱动机构将摄像模组从电子设备的内部移动到电子设备的外部,此时摄像模组可以正常使用。当电子设备使用外摄像模组时,驱动机构将摄像模组从电子设备的外部移动到电子设备的内部,摄像模组进入待机状态或关机状态。
135.为了更好的理解本实施例的电子设备,下面以电子设备1为手机示例,如图13所示,电子设备1除了上述实施例的摄像模组10外,还可以包括显示屏30、电池40和主板50。需要说明的是,电子设备的后置摄像头也可以为上述实施例的摄像模组。当然,电子设备可以仅前置摄像头或后置摄像头也可以为上述实施例的摄像模组。
136.壳体20可以包括中框21和后壳22,显示屏30可以盖设于中框21的一面,后壳22设于中框21的另一面。例如,显示屏30和后壳22可以通过粘接、焊接以及卡接等方式盖设于中框21相背设置的两面。摄像模组10可以设置于显示屏30和后壳22之间,并能够接受到外部环境射入的光线。
137.后壳22可以是电子设备1的电池盖,它的材质可以是玻璃、金属和硬质塑料等,也可以由其它电致变色材料制成。其中,后壳22具有一定的结构强度,主要用于保护电子设备1。相应地,中框21的材质也可以是玻璃、金属和硬质塑料等。中框21也具有一定的结构强度,主要用于支撑和固定摄像模组10以及安装在中框21和后壳22之间的其他功能器件。例如电子设备1的电池40、主板50以及天线等。进一步地,由于中框21和后壳22一般会直接暴露于外界环境,中框21和后壳22的材质可以优选地具有一定的耐磨耐蚀防刮等性能,或者在中框21和后壳22的外表面(也即是电子设备1的外表面)涂布一层用于耐磨耐蚀防刮的功能材料。
138.显示屏30可以包括显示模组以及用于响应对显示模组进行触控操作的电路等。其
中,显示屏30可以是使用有机发光二极管(organic light-emitting diode,简称oled)的屏幕进行图像显示,也可以是使用液晶显示器(liquid crystal display,简称lcd)的屏幕进行图像显示。并且显示屏30在外形上可以是平板屏幕,也可以是双曲面屏幕,还可以是四曲面屏幕,本实施例对此不作限定。
139.需要说明的是,对于手机而言,上述平板屏幕是指显示屏30在整体上呈平板状设置;上述双曲面屏幕是指显示屏30的左、右边缘区域呈弯曲状设置,其他区域依旧呈平板状设置,这样不仅能够减小显示屏30的黑边并增加显示屏30的可视区域,还能够增加电子设备1的外观美感及握持手感;上述四曲面屏幕是指显示屏30的上、下、左、右边缘区域均呈弯曲状设置,其他区域依旧呈平板状设置,这样不仅能够进一步减小显示屏30的黑边并增加显示屏30的可视区域,还能够进一步增加电子设备1的外观美感及握持手感。
140.主板50可以设置在壳体20内,主板50可以为电子设备1的主控电路板。主板50上可以集成有处理器,此外还可以集成耳机接口、加速度传感器、陀螺仪、马达等功能组件中的一个或多个。主板50上的处理器可对显示屏30、摄像模组10进行控制。
141.电池40可以设置在壳体20内,电池40可电连接至主板50,以实现电池40为电子设备1供电。主板50上可以设置有电池40管理电路。电池40管理电路用于将电池40提供的电压分配到电子设备1中的各个电子器件。
142.可以理解的是,以上仅为电子设备1的示例性举例,本技术实施例的电子设备1还可以包括传感器、声电转换装置、天线模组等部件,这些部件可以参见相关技术中的描述,在此不再赘述。
143.可以理解的,本技术实施例提供的电子设备可以是手机、平板电脑等移动终端设备,还可以是游戏设备、增强现实(augmented reality,ar)设备、虚拟现实(virtual reality,vr)设备、车载电脑、笔记本电脑、数据存储装置、音频播放装置、视频播放装置、可穿戴设备、监控设备等具有摄像模组的设备,其中可穿戴设备可以是智能手表、智能眼镜等。
144.在本技术的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
145.以上对本技术实施例所提供的电路板、摄像模组及电子设备进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1