一种利用感知信号进行感知处理的方法和装置及设备与流程
本技术涉及无线通信,特别涉及一种利用感知信号进行感知处理的方法和装置及设备。
背景技术:
1、6g通感一体化(joint communication and sensing,jcas)波形(waveform)设计的目标是设计合适的波形,使得通信信号与感知信号能在相同频段工作,共享无线资源和硬件资源。目前,通感一体化波形设计的一个主要研究思路是基于现有4g/5g通信系统波形正交频分复用(orthogonal frequency division multiplexing,ofdm),6g通感一体化的一个重要应用是无线感知定位。
2、如图1为网格信号资源块,网格状信号资源块在时域和频域的感知信号均等间隔分布,图中深灰色为感知信号符号,浅灰色为通信符号。ofdm雷达主流的测距测速解算方为法采用最大似然估计算法(maximum likelihood estimation,mle),对图1中网格状信号资源块携带的调制符号域(modulation symbol domain)的归一化后的调制符号矩阵做二阶离散傅里叶变换(2d-dft)以获得被测目标的距离速度信息。该方法存在以下问题:
3、1)2d-dft需先对调制符号矩阵逐行做一阶离散傅里叶变换1d-dft,再将结果矩阵做逐列1d-idft。当测距测速的精度要求高时,傅里叶变换的阶数会很高,造成最大似然估计算法的计算复杂度极大;
4、2)最大似然估计算法需要的感知波形为感知信号在频域和时域等间隔网格状分布,该波形的感知开销很大,会对通信性能造成较大影响。
技术实现思路
1、为了解决相关技术中网格状信号资源块在时域和频域的感知信号均等间隔分布,造成最大似然估计算法的计算复杂度极大及波形感知开销大的问题,本技术提供了能够降低计算复杂度和减少波形感知开销的方案。
2、根据本技术实施例第一方面,本技术提供一种利用感知信号进行感知处理的方法,该方法包括:
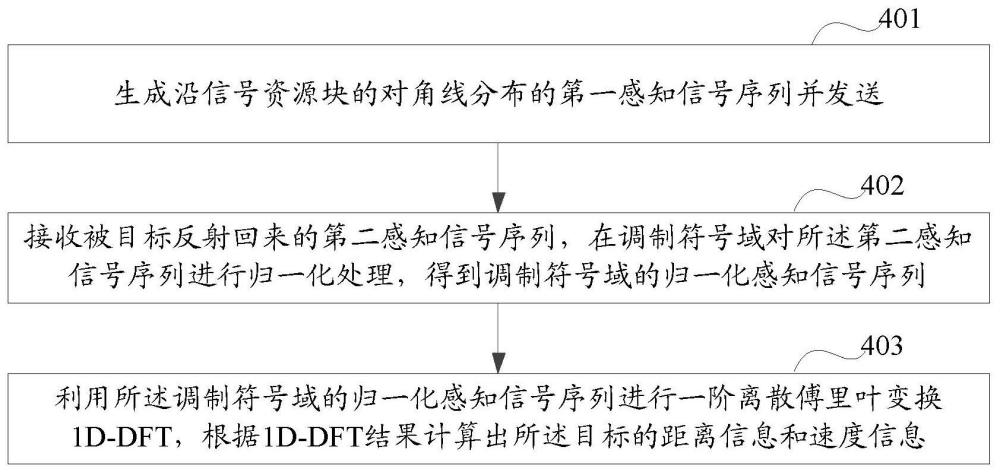
3、生成沿信号资源块的对角线分布的第一感知信号序列并发送;
4、接收被目标反射回来的第二感知信号序列,在调制符号域对所述第二感知信号序列进行归一化处理,得到调制符号域的归一化感知信号序列;
5、利用所述调制符号域的归一化感知信号序列进行一阶离散傅里叶变换1d-dft,根据1d-dft结果计算出所述目标的距离信息和速度信息。
6、在一个或多个可能的实施例中,生成沿信号资源块的对角线分布的第一感知信号序列,包括:
7、生成沿信号资源块的对角线等间隔分布的第一感知信号序列;
8、其中,所述第一感知信号序列包括多个感知信号,且所述信号资源块在时域和频域上分别包括的感知信号的数量相同。
9、在一个或多个可能的实施例中,根据1d-dft结果计算出目标的距离信息和速度信息,包括:
10、根据1d-dft结果确定第一峰值位置对应的第一采样点序号,及第二峰值位置对应的第二采样点序号;
11、根据所述第一采样点序号和第二采样点序号计算包含距离信息的频率及包含速度信息的频率;
12、根据包含距离信息的频率计算距离信息,根据包含速度信息的频率计算速度信息。
13、在一个或多个可能的实施例中,根据所述第一采样点序号和第二采样点序号求解包含距离信息的频率及包含速度信息的频率,包括:
14、确定频率fh和频率fl,其中,l1为第一采样点序号,l2为第二采样点序号;
15、根据所述目标的线性运动模型,确定频率fh为包含距离信息的频率,确定频率fl为包含速度信息的频率,或者确定频率fl为包含距离信息的频率,确定频率fh为包含速度信息的频率;
16、其中,所述线性运动模型为根据目标的运动特征,建立的预测所述目标在不同时间对应的距离和速度的模型。
17、在一个或多个可能的实施例中,利用包含距离信息的频率求解距离信息,利用包含速度信息的频率求解速度信息,包括:
18、利用包含距离信息的频率为求解距离信息;
19、利用包含速度信息的频率为求解速度信息;
20、其中,δf代表感知信号序列的子载波间隔,nc代表感知信号序列的总子载波数目,r为距离,c0代表光速,nsym代表持续时间tb内感知信号序列的符号数,fc代表载波频率,tb为感知信号序列的时域持续时间。
21、在一个或多个实施例中,根据所述目标的线性运动模型,确定频率fh为包含距离信息的频率,确定频率fl为包含速度信息的频率,或者确定频率fl为包含距离信息的频率,确定频率fh为包含速度信息的频率,包括:
22、利用频率fh求解第一距离信息,利用频率fl求解第一速度信息,利用fl求解第二距离信息,利用fh求解第二速度信息;
23、利用所述线性运动模型根据所述第一距离信息和第一速度信息预测未来不同时刻的第三距离信息和第四速度信息,并确定未来不同时刻的第三距离信息和第四速度信息对应的第一1d-dft结果;
24、利用所述线性运动模型根据所述第二距离信息和第二速度信息预测未来不同时刻的第四距离信息和第四速度信息,并确定未来不同时刻的第四距离信息和第四速度信息对应的第二1d-dft结果;
25、到达未来不同时刻测量得到第五距离信息和第五速度信息,并确定所述第五距离信息和第五速度信息对应的第三1d-dft结果;
26、确定所述第一1d-dft结果与所述第三1d-dft结果相匹配时,确定频率fh为包含距离信息的频率,确定频率fl为包含速度信息的频率,确定所述第二1d-dft结果与所述第三1d-dft结果相匹配时,确定频率fl为包含距离信息的频率,确定频率fh为包含速度信息的频率。
27、在一个或多个实施例中,在调制符号域对所述第二感知信号序列进行归一化处理,得到调制符号域的归一化感知信号序列,包括:
28、将所述第二感知信号序列与所述第一感知信号序列相比,得到调制符号域的归一化感知信号序列。
29、根据本技术实施例第二方面,提供一种利用感知信号进行感知处理的设备,所述设备包括存储器和处理器;
30、其中,所述存储器用于存储计算机程序;
31、所述处理器用于读取所述存储器中的程序并执行:
32、生成沿信号资源块的对角线分布的第一感知信号序列并发送;
33、接收被目标反射回来的第二感知信号序列,在调制符号域对所述第二感知信号序列进行归一化处理,得到调制符号域的归一化感知信号序列;
34、利用所述调制符号域的归一化感知信号序列进行一阶离散傅里叶变换1d-dft,根据1d-dft结果计算出所述目标的距离信息和速度信息。
35、在一个或多个可能的实施例中,所述处理器生成沿信号资源块的对角线间隔分布的第一感知信号序列,包括:
36、生成沿信号资源块的对角线等间隔分布的第一感知信号序列;
37、其中,所述第一感知信号序列包括多个感知信号,且所述信号资源块在时域和频域上分别包括的感知信号的数量相同。
38、在一个或多个可能的实施例中,所述处理器根据1d-dft结果计算出目标的距离信息和速度信息,包括:
39、根据1d-dft结果确定第一峰值位置对应的第一采样点序号,及第二峰值位置对应的第二采样点序号;
40、根据所述第一采样点序号和第二采样点序号计算包含距离信息的频率及包含速度信息的频率;
41、根据包含距离信息的频率计算距离信息,根据包含速度信息的频率计算速度信息。
42、在一个或多个可能的实施例中,所述处理器根据所述第一采样点序号和第二采样点序号求解包含距离信息的频率及包含速度信息的频率,包括:
43、确定频率fh和频率fl,其中,l1为第一采样点序号,l2为第二采样点序号;
44、根据所述目标的线性运动模型,确定频率fh为包含距离信息的频率,确定频率fl为包含速度信息的频率,或者确定频率fl为包含距离信息的频率,确定频率fh为包含速度信息的频率;
45、其中,所述线性运动模型为根据目标的运动特征,建立的预测所述目标在不同时间对应的距离和速度的模型。
46、在一个或多个可能的实施例中,所述处理器利用包含距离信息的频率求解距离信息,利用包含速度信息的频率求解速度信息,包括:
47、利用包含距离信息的频率为求解距离信息;
48、利用包含速度信息的频率为求解速度信息;
49、其中,δf代表感知信号序列的子载波间隔,nc代表感知信号序列的总子载波数目,r为距离,c0代表光速,nsym代表持续时间tb内感知信号序列的符号数,fc代表载波频率,tb为感知信号序列的时域持续时间。
50、在一个或多个可能的实施例中,所述处理器根据所述目标的线性运动模型,确定频率fh为包含距离信息的频率,确定频率fl为包含速度信息的频率,或者确定频率fl为包含距离信息的频率,确定频率fh为包含速度信息的频率,包括:
51、利用频率fh求解第一距离信息,利用频率fl求解第一速度信息,利用fl求解第二距离信息,利用fh求解第二速度信息;
52、利用所述线性运动模型根据所述第一距离信息和第一速度信息预测未来不同时刻的第三距离信息和第四速度信息,并确定未来不同时刻的第三距离信息和第四速度信息对应的第一1d-dft结果;
53、利用所述线性运动模型根据所述第二距离信息和第二速度信息预测未来不同时刻的第四距离信息和第四速度信息,并确定未来不同时刻的第四距离信息和第四速度信息对应的第二1d-dft结果;
54、到达未来不同时刻测量得到第五距离信息和第五速度信息,并确定所述第五距离信息和第五速度信息对应的第三1d-dft结果;
55、确定所述第一1d-dft结果与所述第三1d-dft结果相匹配时,确定频率fh为包含距离信息的频率,确定频率fl为包含速度信息的频率,确定所述第二1d-dft结果与所述第三1d-dft结果相匹配时,确定频率fl为包含距离信息的频率,确定频率fh为包含速度信息的频率。
56、在一个或多个可能的实施例中,所述处理器在调制符号域对所述第二感知信号序列进行归一化处理,得到调制符号域的归一化感知信号序列,包括:
57、将所述第二感知信号序列与所述第一感知信号序列相比,得到调制符号域的归一化感知信号序列。
58、根据本技术实施例第三方面,提供一种利用感知信号进行感知处理的装置,包括:
59、感知信号生成模块,用于生成沿信号资源块的对角线分布的第一感知信号序列并发送;
60、感知信号接收模块,用于接收被目标反射回来的第二感知信号序列,在调制符号域对所述第二感知信号序列进行归一化处理,得到调制符号域的归一化感知信号序列;
61、感知信息获取模块,用于利用所述调制符号域的归一化感知信号序列进行一阶离散傅里叶变换1d-dft,根据1d-dft结果计算出所述目标的距离信息和速度信息。
62、在一个或多个可能的实施例中,感知信号生成模块生成沿信号资源块的对角线分布的第一感知信号序列,包括:
63、生成沿信号资源块的对角线等间隔分布的第一感知信号序列;
64、其中,所述第一感知信号序列包括多个感知信号,且所述信号资源块在时域和频域上分别包括的感知信号的数量相同。
65、在一个或多个可能的实施例中,感知信息获取模块根据1d-dft结果计算出目标的距离信息和速度信息,包括:
66、根据1d-dft结果确定第一峰值位置对应的第一采样点序号,及第二峰值位置对应的第二采样点序号;
67、根据所述第一采样点序号和第二采样点序号计算包含距离信息的频率及包含速度信息的频率;
68、根据包含距离信息的频率计算距离信息,根据包含速度信息的频率计算速度信息。
69、在一个或多个可能的实施例中,感知信息获取模块根据所述第一采样点序号和第二采样点序号求解包含距离信息的频率及包含速度信息的频率,包括:
70、确定频率fh和频率fl,其中,l1为第一采样点序号,l2为第二采样点序号;
71、根据所述目标的线性运动模型,确定频率fh为包含距离信息的频率,确定频率fl为包含速度信息的频率,或者确定频率fl为包含距离信息的频率,确定频率fh为包含速度信息的频率;
72、其中,所述线性运动模型为根据目标的运动特征,建立的预测所述目标在不同时间对应的距离和速度的模型。
73、在一个或多个可能的实施例中,感知信息获取模块利用包含距离信息的频率求解距离信息,利用包含速度信息的频率求解速度信息,包括:
74、利用包含距离信息的频率为求解距离信息;
75、利用包含速度信息的频率为求解速度信息;
76、其中,δf代表感知信号序列的子载波间隔,nc代表感知信号序列的总子载波数目,r为距离,c0代表光速,nsym代表持续时间tb内感知信号序列的符号数,fc代表载波频率,tb为感知信号序列的时域持续时间。
77、在一个或多个可能的实施例中,感知信息获取模块根据所述目标的线性运动模型,确定频率fh为包含距离信息的频率,确定频率fl为包含速度信息的频率,或者确定频率fl为包含距离信息的频率,确定频率fh为包含速度信息的频率,包括:
78、利用频率fh求解第一距离信息,利用频率fl求解第一速度信息,利用fl求解第二距离信息,利用fh求解第二速度信息;
79、利用所述线性运动模型根据所述第一距离信息和第一速度信息预测未来不同时刻的第三距离信息和第四速度信息,并确定未来不同时刻的第三距离信息和第四速度信息对应的第一1d-dft结果;
80、利用所述线性运动模型根据所述第二距离信息和第二速度信息预测未来不同时刻的第四距离信息和第四速度信息,并确定未来不同时刻的第四距离信息和第四速度信息对应的第二1d-dft结果;
81、到达未来不同时刻测量得到第五距离信息和第五速度信息,并确定所述第五距离信息和第五速度信息对应的第三1d-dft结果;
82、确定所述第一1d-dft结果与所述第三1d-dft结果相匹配时,确定频率fh为包含距离信息的频率,确定频率fl为包含速度信息的频率,确定所述第二1d-dft结果与所述第三1d-dft结果相匹配时,确定频率fl为包含距离信息的频率,确定频率fh为包含速度信息的频率。
83、在一个或多个可能的实施例中,感知信号接收模块在调制符号域对所述第二感知信号序列进行归一化处理,得到调制符号域的归一化感知信号序列,包括:
84、将所述第二感知信号序列与所述第一感知信号序列相比,得到调制符号域的归一化感知信号序列。
85、根据本技术实施例的第四方面,提供一种芯片,所述芯片与设备中的存储器耦合,使得所述芯片在运行时调用所述存储器中存储的程序指令,实现本技术实施例上述各个方面以及各个方面涉及的任一可能涉及的方法。
86、根据本技术实施例的第五方面,提供一种计算机可读存储介质,该计算机存储介质存储有程序指令,当其在计算机上运行时,使得计算机执行本技术实施例上述各个方面以及各个方面涉及的任一可能涉及的方法。
87、根据本技术实施例的第六方面,提供一种计算机程序产品,当所述计算机程序产品在电子设备上运行时,使得所述电子设备执行实现本技术实施例上述各个方面以及各个方面涉及的任一可能涉及的方法。
88、利用本技术提供的利用感知信号进行感知处理的方法和装置及设备,具有以下有益效果:
89、将调制符号域的归一化感知信号包含的目标反射物的距离及速度信息同时解算,大大降低了感知信号感知处理计算的复杂度,波形结构极大的降低了感知信号的开销,且越高阶的dft处理,相比传统的网格状波形,本技术中的对角线形波形感知开销减少越多。
- 还没有人留言评论。精彩留言会获得点赞!