无线拖车连接的制作方法
本公开总体上涉及一种用于在机动车辆内提供车辆到拖车数据通信的系统。更具体地,本公开的方面涉及用于确定牵引车辆(towing)的拖曳状态、在牵引车辆和拖车之间建立通信链路以及在拖曳操作期间在牵引车辆和拖车之间发送数据的系统、方法和设备。
背景技术:
1、长期以来,个人机动车辆都配备有在车辆后面牵引拖车的设备。这些拖车可能包括露营拖车、船拖车或公用拖车。这些拖车通常物理连接到以机械方式固定到牵引车辆框架的车辆拖车挂接器(hitch)。拖车通过联接到拖车框架的挂接器装置连接到拖车挂接器。此外,在牵引车辆和拖车之间提供电气连接,为拖车照明和制动系统提供电力,以及联接电子信号以控制拖车制动器的施加和各种拖车灯的照明,例如制动器灯、转向信号灯、倒车灯等。
2、困难在于驾驶员必须物理地连接和断开拖车和牵引车辆之间的电连接。此外,在拖车和牵引车辆之间运行的这些电线在拖曳操作期间由于拖车的铰接和振动、接触电线和连接器的异物以及由于天气条件而导致的退化,容易受到损坏。要求操作员物理完成电气连接大大降低了自主车辆拖车应用的自主水平。此外,在拥挤的牵引环境(例如船坡道或露营地)中,在特定牵引车辆和特定拖车之间建立拖车无线通信连接可能会导致额外的问题,而无需大量人工干预。希望提供一种用于在牵引车辆和拖车之间提供数据通信同时克服上述问题的器件。
技术实现思路
1、本文公开的是用于提供车辆系统的车辆传感器方法和系统及相关控制逻辑、用于制造方法和用于操作此类系统的方法,以及配备车载控制系统的机动车辆。作为示例而非限制,给出了用于在牵引车辆和拖车之间建立无线数据通信的系统的各种实施例。
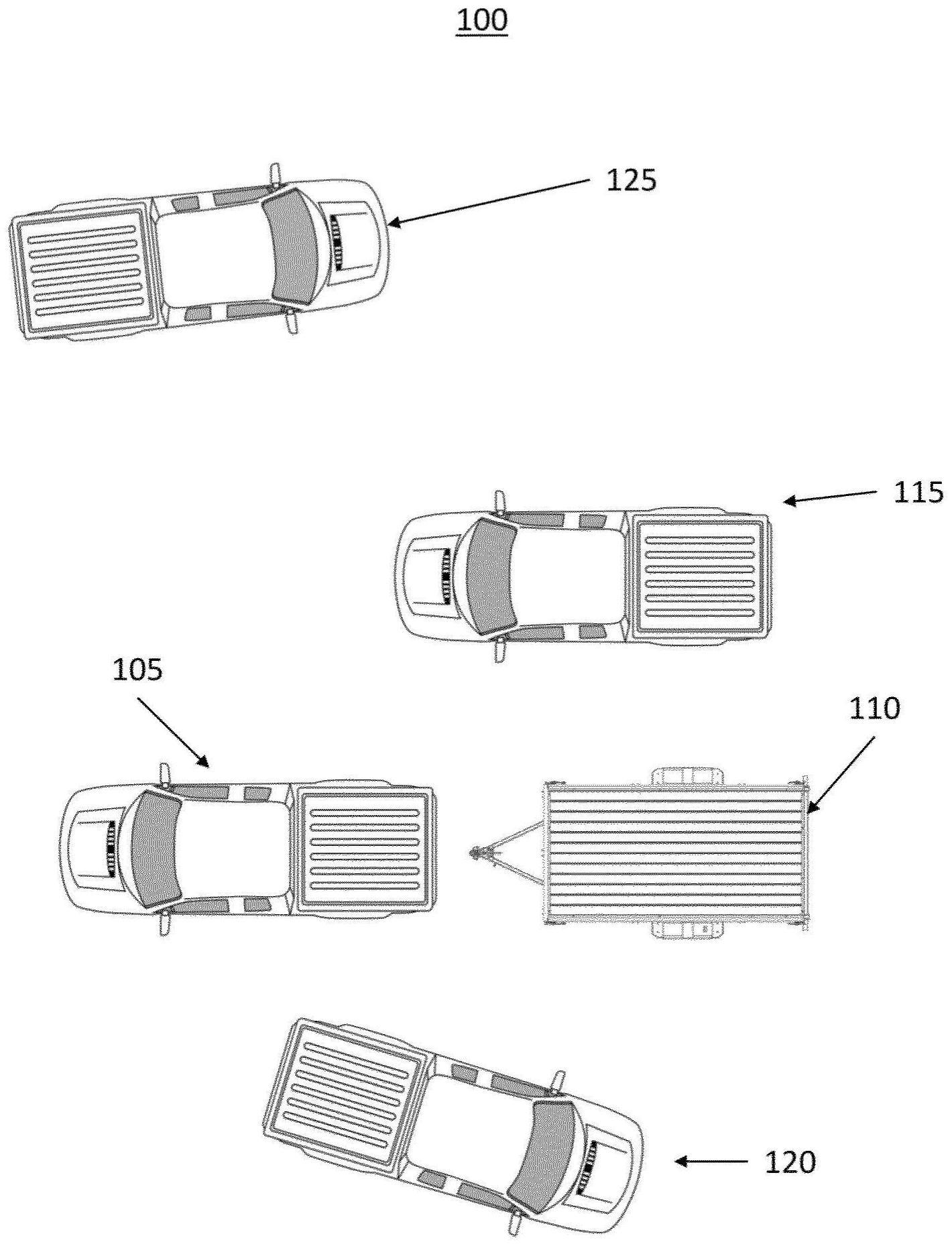
2、根据本公开的一个方面,一种启用拖车和第一牵引车辆之间的v2v通信链路的方法,包括接收牵引系统启动控制信号,发送牵引车辆请求,接收包括第一牵引车辆位置和第一牵引车辆标识符的第一牵引车辆响应,确定第一牵引车辆和拖车之间的第一距离,响应于第一距离小于阈值距离来启用v2v通信链路。
3、根据本公开的另一个方面,其中阈值距离是牵引车辆平均长度的两倍。
4、根据本公开的一个方面,一种方法,包括接收包括第二牵引车辆位置和第二牵引车辆标识符的第二牵引车辆响应,确定拖车和第二牵引车辆之间的第二距离,并响应于第一距离小于第二距离来启用拖车和第一牵引车辆之间的v2v通信链路。
5、根据本公开的一个方面,一种方法,其中从用户界面接收牵引系统启动控制信号。
6、根据本公开的一个方面,一种方法,其中牵引系统启动控制信号是响应于拖车挂接器联接到牵引车辆挂接器而产生的。
7、根据本公开的一个方面,一种方法,其中所述牵引车辆响应包括牵引车辆速度,且其中所述v2v通信链路是响应于牵引车辆速度与拖车速度匹配而启用的。
8、根据本公开的一个方面,一种方法,其中,响应于第一牵引车辆的用户确认,启用v2v通信链路。
9、根据本公开的一个方面,一种方法包括经由v2v通信链路来接收拖车灯控制信号,并响应于拖车灯控制信号来控制拖曳照明系统。
10、根据本公开的一个方面,一种方法包括经由v2v通信链路来接收拖车制动控制信号,并响应于拖车灯控制信号来控制拖车制动系统。
11、根据本公开的一个方面,一种方法包括经由v2v通信链路来接收第一牵引车辆防抱死制动控制信号,并响应于第一牵引车辆防抱死制动控制信号来控制拖车防抱死制动系统。
12、根据本公开的一个方面,一种拖车控制器,包括配置为接收牵引系统启动控制信号的控制输入;v2v通信收发器,用于发送牵引车辆请求、接收包括第一牵引车辆位置和第一牵引车辆标识符的第一牵引车辆响应;配置为用于检测拖车位置的位置检测器;以及处理器,该处理器被配置用于响应于第一牵引车辆位置和拖车位置来确定第一牵引车辆和拖车之间的第一距离,响应于第一距离小于阈值距离来启用v2v通信链路。
13、根据本公开的一个方面,一种拖车控制器,其中,所述v2v通信收发器还可操作以响应于处理器启用v2v通信链路,与第一牵引车辆建立v2v通信链路。
14、根据本公开的一个方面,一种拖车控制器,其中所述v2v通信收发器还可操作以经由v2v通信链路来接收来自第一牵引车辆的拖车控制信号,其中,所述处理器还可响应于拖车控制信号来控制拖车制动器。
15、根据本公开的一个方面,拖车控制器响应于用户输入来接收牵引系统启动控制信号。
16、根据本公开的一个方面,一种拖车控制器,其中牵引系统启动控制信号是响应于牵引车辆和拖车之间的挂接器连接而产生的。
17、根据本公开的一个方面,拖车控制器,其中v2v通信收发器进一步配置为接收包括第二牵引车辆位置和第二牵引车辆标识符的第二牵引车辆响应,确定拖车和第二牵引车辆之间的第二距离,并响应于第一距离小于第二距离来启用拖车和第一牵引车辆之间的v2v通信链路。
18、根据本公开的一个方面,一种拖车控制器,其中位置检测器为全球定位系统接收器。
19、根据本公开的一个方面,一种拖车控制器,其中,响应于第一牵引车辆标识符匹配先前启用的v2v通信链路内相关的先前牵引车辆标识符,启用v2v通信链路。
20、根据本公开的一个方面,一种拖车控制系统,包括:收发器,用于发送拖车控制链路(link)请求,用于接收包括第一车辆位置的第一拖车控制链路响应和包括第二车辆位置的第二拖车控制链路响应,并接收控制信号;全球定位系统接收器,用于确定拖车位置;处理器,用于响应于第一车辆位置和拖车之间的第一距离小于第二车辆位置和拖车之间的第二距离,启用与第一车辆的拖车控制链路;以及拖车控制器,用于响应于经由拖车控制链路接收的控制信号来控制拖车制动系统。
21、根据本公开的一个方面,一种拖车控制系统,其中拖车控制链路请求响应于用户输入进行发送。
22、通过以下结合附图时对优选实施例的详细描述,本公开的上述优势和其他优势及特征将变得显而易见。
技术特征:
1.一种用于启用拖车和第一牵引车辆之间的v2v通信链路的方法,包括:
2.根据权利要求1所述的方法,其中所述阈值距离小于14米。
3.根据权利要求1所述的方法,还包括接收包括第二牵引车辆位置和第二牵引车辆标识符的第二牵引车辆响应,确定拖车和第二牵引车辆之间的第二距离,并响应于第一距离小于第二距离而启用拖车和第一牵引车辆之间的v2v通信链路。
4.根据权利要求1所述的方法,其中牵引系统启动控制信号是从用户界面接收的。
5.根据权利要求1所述的方法,其中所述牵引系统启动控制信号是响应于拖车挂接器联接到牵引车辆挂接器而产生的。
6.根据权利要求1所述的方法,其中第一牵引车辆响应包括牵引车辆速度,并且其中响应于牵引车辆速度与拖车速度匹配,启用v2v通信链路。
7.根据权利要求1所述的方法,包括经由v2v通信链路接收拖车灯控制信号,并响应于拖车灯控制信号来控制拖曳照明系统。
8.根据权利要求1所述的方法,包括经由v2v通信链路接收拖车制动控制信号,并响应于该拖车制动控制信号来控制拖车制动系统。
9.根据权利要求1所述的方法,包括经由v2v通信链路接收第一牵引车辆防抱死制动控制信号,并响应于第一牵引车辆防抱死制动控制信号来控制拖车防抱死制动系统。
10.一种拖车控制器,包括:
技术总结
一种用于启用拖车和第一牵引车辆之间的V2V通信链路的方法,包括接收牵引系统启动控制信号,发送牵引车辆请求,接收包括第一牵引车辆位置和第一牵引车辆标识符的第一牵引车辆响应,确定第一牵引车辆和拖车之间的第一距离,以及响应于第一距离小于阈值距离来启用V2V通信链路。
技术研发人员:T.J.布林克曼,R.D.施洛特克,C.L.海,P.B.亚伯拉罕
受保护的技术使用者:通用汽车环球科技运作有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!