一种侦察机器人及其侦察仪的制作方法
1.本发明涉及智能机器人技术领域,特别涉及一种侦察仪。本发明还涉及一种侦察机器人。
背景技术:
2.地面侦察机器人是当前机器人领域的研究热点之一,主要应用在火场侦察、灾难营救、反恐防爆、核设施检查等多种危险环境,是以完成预定的战术或任务为目标,以智能化、信息处理技术和通信技术为核心的智能化设备。侦察机器人的工作环境具有多样性,复杂性,要求具有很强的环境适应能力,以及能将现场的情况准确反馈到控制终端的侦查能力。
3.侦察仪是地面侦察机器人的“眼睛”,属于侦察机器人实现智能化工作的核心部件。侦察仪一般装备在地面侦察机器人的平台上,受到机械手臂承重能力的制约,常见的形式为机械手臂上装载单光谱模组作为机械手臂控制,在机械手臂后方的单独平台上搭载多光谱融合模组作为环境观测。
4.随着用户对地面侦察机器人的机动性、灵活性、便携性要求不断提高,便携式地面侦察机器人的需求市场日益扩大,其侦察仪也朝着小型化、轻量化和模块化的趋势发展。目前,背包式侦察机器人的侦察仪由单光谱探测模组逐渐走向了多光谱融合探测模组,然而,现有技术中的侦察仪,多光谱融合探测模组与壳体集成安装连接为一体后,再一同安装在侦察机器人的机身上,由于涉及两级连接结构,导致安装结构略复杂,且当壳体受到外力冲击产生振动、摇晃时,容易将冲击振动传递到多光谱融合探测模组上,导致多光谱融合探测模组获取的图像信号不稳定、图像质量易受干扰。
5.因此,如何避免壳体将冲击振动传递到探测模组,在侦察作业过程中保证图像信号稳定,维持图像质量,是本领域技术人员面临的技术问题。
技术实现要素:
6.本发明的目的是提供一种侦察仪,能够避免壳体将冲击振动传递到探测模组,在侦察作业过程中保证图像信号稳定,维持图像质量。本发明的另一目的是提供一种侦察机器人。
7.为解决上述技术问题,本发明提供一种侦察仪,包括壳体、内置于所述壳体中的探测模组,所述壳体开设有安装孔,所述探测模组上设置有连接组件,所述连接组件通过所述安装孔与侦察机器人的机身相连。
8.优选地,所述连接组件与所述机身可拆卸连接。
9.优选地,所述连接组件为与所述机身上预留的连接器适配的接口部件。
10.优选地,所述壳体为聚酰亚胺薄膜,包括膜壁、开设于所述膜壁内的夹层,所述夹层内填充有气体。
11.优选地,所述夹层在所述膜壁内开设有至少两层。
12.优选地,所述壳体为金属壳体、合金壳体或塑料壳体,且所述壳体的密度为1.4~2.7g/cm3。
13.优选地,所述探测模组包括安装支架、设置于所述安装支架上的红外镜组、设置于所述安装支架上的可见光镜组、设置于所述安装支架上的激光测距组。
14.优选地,所述探测模组还包括与所述安装支架可拆卸连接的连接支板、安装于所述连接支板上的控制板,所述控制板与所述红外镜组、所述可见光镜组、所述激光测距组信号连接。
15.优选地,所述安装支架上开设有用于定位装夹所述红外镜组的固定孔、用于稳定支撑所述可见光镜组的支撑底板、用于分隔所述激光测距组的发射光路与反馈光路的双联孔。
16.本发明还提供一种侦察机器人,包括机身和设置于所述机身上的侦察仪,其中,所述侦察仪具体为上述任一项所述的侦察仪。
17.本发明所提供的侦察仪,主要包括壳体、探测模组和连接组件。其中,壳体为侦察仪的外层结构,主要用于容纳探测模组等零部件,为探测模组等零部件提供外层防护。探测模组内置于壳体中,主要用于探测环境,完成环境侦察作业。连接组件设置在探测模组上,同时,在壳体上开设有安装孔,而连接组件通过该安装孔伸出壳体并与侦察机器人的机身相连。如此,由于探测模组通过连接组件直接与侦察机器人的机身相连,不与壳体形成直接连接关系,不再通过壳体与侦察机器人的机身相连,因此,壳体对探测模组仅起到防护作用、遮蔽作用,不起到过渡连接的作用,两者互相独立,使得在壳体受到外力冲击时,壳体产生的冲击振动并不会传递到探测模组上,从而能够避免对探测模组产生冲击振动影响,在侦察仪的作业过程中保证图像信号稳定,维持图像质量。此外,侦察机器人的机身上一般配置有悬挂系统等部件,探测模组与侦察机器人的机身直接相连后,还能够获得减振增益效果,进一步提高探测模组的作业稳定性。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
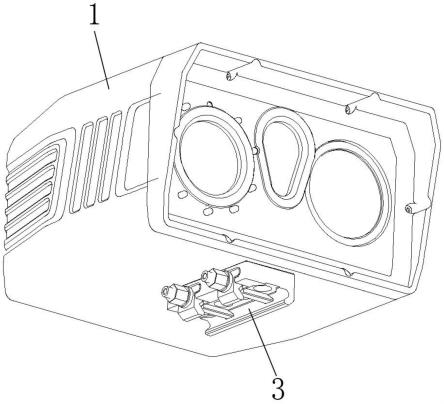
19.图1为本发明所提供的一种具体实施方式的整体结构示意图。
20.图2为图1的另一视角示意图。
21.图3为图1的水平方向拆解结构示意图。
22.图4为图1的垂直方向拆解结构示意图。
23.图5为壳体的一种截面结构示意图。
24.图6为壳体的另一种截面结构示意图。
25.图7为探测模组的一种具体结构示意图。
26.图8为图7的另一视角示意图。
27.图9为图7的结构爆炸图。
28.图10为本发明所提供的一种具体实施方式中侦察仪在机身上的安装结构示意图。
29.其中,图1—图10中:
30.壳体—1,探测模组—2,连接组件—3,连接器—4,密封圈—5;
31.膜壁—1a,夹层—1b;
32.安装孔—11,前盖—12,主壳—13,通讯接口—14;
33.安装支架—21,红外镜组—22,可见光镜组—23,激光测距组—24,连接支板—25,控制板—26;
34.固定孔—211,支撑底板—212,双联孔—213。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.请参考图1、图2,图1为本发明所提供的一种具体实施方式的整体结构示意图,图2为图1的另一视角示意图。
37.在本发明所提供的一种具体实施方式中,侦察仪主要包括壳体1、探测模组2和连接组件3。
38.其中,壳体1为侦察仪的外层结构,主要用于容纳探测模组2等零部件,为探测模组2等零部件提供外层防护。
39.探测模组2内置于壳体1中,主要用于探测环境,完成环境侦察作业。
40.连接组件3设置在探测模组2上,同时,在壳体1上开设有安装孔11,而连接组件3通过该安装孔11伸出壳体1并与侦察机器人的机身相连。
41.如此,由于探测模组2通过连接组件3直接与侦察机器人的机身相连,不与壳体1形成直接连接关系,不再通过壳体1与侦察机器人的机身相连,因此,壳体1对探测模组2仅起到防护作用、遮蔽作用,不起到过渡连接的作用,两者互相独立,使得在壳体1受到外力冲击时,壳体1产生的冲击振动并不会传递到探测模组2上,从而能够避免对探测模组2产生冲击振动影响,在侦察仪的作业过程中保证图像信号稳定,维持图像质量。
42.此外,侦察机器人的机身上一般配置有悬挂系统等部件,探测模组2与侦察机器人的机身直接相连后,还能够获得减振增益效果,进一步提高探测模组2的作业稳定性。
43.如图3、图4所示,图3为图1的水平方向拆解结构示意图,图4为图1的垂直方向拆解结构示意图。
44.为便于实现连接组件3在侦察机器人的机身上的连接、拆卸、维护、扩展等作业操作,本实施例中,连接组件3与侦察机器人的机身之间形成可拆卸连接。具体的,连接组件3可通过螺栓、螺丝等紧固件与侦察机器人的机身相连,也可以通过工字钉、葫芦孔等部件的配合与侦察机器人的机身相连,还可以通过卡扣、卡接柱、卡接槽等部件的配合与侦察机器人的机身形成卡接。如此设置,连接组件3可以方便地从侦察机器人的机身上拆卸,并且还可以装载在其它平台上,以将探测模组2作为观瞄设备的侦察模块使用,并可以根据不同场景配置不同款式的产品外壳,比如可将探测模组2从侦察机器人的机身上拆卸后,装载在监控站、车辆、飞机、船只、无人机或自动武器站等观瞄设备上。
45.当然,若有必要,连接组件3与侦察机器人的机身之间还可以是固定连接,比如焊接、一体成型设计等。
46.在关于连接组件3的一种可选实施例中,考虑到在侦察机器人的机身上通常预留有特定种类的连接器4,因此,连接组件3具体可采用与该连接器4适配的接口部件,以方便连接和拆卸。比如,在侦察机器人的机身上预留的连接器4是标准皮轨时,则连接组件3可以采用皮轨接口部件。同理,当侦察机器人的机身上预留的连接器4是标准插槽时,则连接组件3可以采用标准插头。
47.此外,探测模组2通过连接组件3与侦察机器人的机身上的连接器4相连后,还能够使侦察仪的重心与连接器4位于同一垂直轴线上,整体结构稳定又平衡。
48.考虑到目前最先进的背包式侦察机器人,为了适应复杂危险环境,其底盘和机械手臂自重已很高,并且多光谱融合侦察仪比单光谱探测系统更重,导致用户负荷过大,对体力造成较大考验,针对此,为实现侦察仪的轻量化设计,在关于壳体1的一种可选实施例中,壳体1具体采用密度较低的轻质材料制成,比如金属壳体、合金壳体或塑料壳体等。一般的,壳体1所采用的轻质材料的密度在1.4~2.7g/cm3之间,具体可以根据不同的使用场景进行配置:
49.对于重量不敏感的监控站、车辆、船只或自动武器平台等,可以采用铝合金材料,其密度约为2.7g/cm3,壁厚为1~1.5mm;
50.对于对重量有一定要求的飞机等,可以采用镁合金材料,其密度约为1.8g/cm3,壁厚为1~1.5mm,或者连续碳纤维编织物增强塑料壳体1,其密度约为1.7g/cm3,壁厚为1~1.2mm;
51.对于有轻量化要求的大型侦察机器人可以采用镁锂合金材料,其密度约为1.5g/cm3,壁厚为1~1.5mm,或短切碳纤维增强塑料,其密度约为1.4g/cm3,壁厚为1~1.5mm。
52.如图5所示,图5为壳体1的一种截面结构示意图。
53.进一步的,为强化轻量化设计,比如对于追求超轻负重的背包式侦察机器人和无人机用侦察仪,壳体1还可以采用薄膜材料,比如聚酰亚胺薄膜等,其密度约为1.4g/cm3,壁厚为0.02~0.03mm。具体的,壳体1为多层结构,包括膜壁1a和开设于膜壁1a内的夹层1b,并且在夹层1b内填充有气体,比如空气,或者氮气等分子量比空气更低的气体。
54.如图6所示,图6为壳体1的另一种截面结构示意图。
55.更进一步的,在壳体1的膜壁1a内开设的夹层1b具有至少两层,比如2、3层或更多。以夹层1b设置有两层为例,壳体1仍然采用聚酰亚胺薄膜,而在两个夹层1b内填充有氦气等分子量远小于空气的气体。如此设置,在各个夹层1b内均充气后,由于氦气的密度不到空气的1/7,充气后会使壳体1增加约7倍的浮力,从而达到抵消自身重量的平衡状态,几乎实现零重力状态。
56.如图7、图8所示,图7为探测模组2的一种具体结构示意图,图8为图7的另一视角示意图。
57.在关于探测模组2的一种可选实施例中,该探测模组2主要包括安装支架21、红外镜组22、可见光镜组23和激光测距组24,且红外镜组22、可见光镜组23和激光测距组24三者集成安装在安装支架21上。其中,安装支架21为主体部件,主要用于安装其余零部件。红外镜组22安装在安装支架21上,主要用于通过红外线的方式探测环境,通常适用于夜间作业。
可见光镜组23安装在安装支架21上,主要用于通过可见光的方式探测环境,通常适用于日间作业。激光测距组24安装在安装支架21上,主要用于通过激光实现目标距离探测。
58.一般的,红外镜组22、可见光镜组23和激光测距组24三者在安装支架21上可采取前后错落的布局方式,使探测模组2的整体结构更加紧凑,以便缩小产品尺寸。
59.进一步的,本实施例还在安装支架21上开设了固定孔211,以便定位装夹红外镜组22的镜头,提高红外镜组22的安装稳定性和作业稳定性。同理,本实施例还在安装支架21上增设了支撑底板212,以对可见光镜组23形成稳定支撑,以提高可见光镜组23的安装稳定性和作业稳定性。并且,本实施例还在安装支架21上开设了双联孔213,以作为激光测距组24的光路保护机构,使激光测距组24的发射激光和反馈激光完全分开,避免测距功能失灵。
60.如图9所示,图9为图7的结构爆炸图。
61.此外,探测模组2还包括连接支板25和控制板26。其中,连接支板25与安装支架21形成可拆卸连接,两者可方便地拆装,而控制板26安装在连接支板25上,并且控制板26与红外镜组22、可见光镜组23和激光测距组24三者以及其余电子元器件保持信号连接。如此设置,连接支板25和控制板26可以作为一个小模块单独拆下,不影响探测模组2的光学系统,方便调试和维修。
62.进一步的,本实施例还在连接支板25上设置有针对控制板26的散热装置,通过连接支板25上错落的台阶结构,与控制板26上的发热元件的位置、高度等参数匹配,从而有效传导控制板26的热量至散热装置,提高散热效率。
63.在关于壳体1的一种可选实施例中,壳体1为分体式结构,主要包括前盖12和主壳13。其中,安装孔11通常开设在主壳13上,比如主壳13的底壁或侧壁等位置。同时,在前盖12与主壳13的前端端面之间设置有密封圈5,以实现产品的前端密封。而在主壳13的后端端面设置有通讯接口14,以与探测模组2中的控制板26保持信号连接。同理,在通讯接口14与主壳13的后端端面之间也可以设置密封圈5,以实现产品的后端密封。
64.此外,在连接组件3与安装孔11的孔缘端面之间也可以设置密封圈5,以加强产品的密封性能。
65.上述所有的密封设计均为胶圈密封,无胶封工艺,重复拆装后依然可以保持良好的防水性能。
66.如图10所示,图10为本发明所提供的一种具体实施方式中侦察仪在机身上的安装结构示意图。
67.本实施例还提供一种侦察机器人,主要包括机身和设置于机身上的侦察仪,其中,该侦察仪的具体内容与上述相关内容相同,此处不再赘述。
68.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1