一种蓝牙与超声结合的精确定位方法与流程
1.本发明涉及一种蓝牙与超声结合的精确定位方法,属于定位技术领域。
背景技术:
2.在室内环境无法使用卫星定位时,使用室内定位技术作为卫星定位的辅助定位,解决卫星信号到达地面时较弱、不能穿透建筑物的问题。最终定位物体当前所处的位置。
3.除通讯网络的蜂窝定位技术外,常见的室内定位技术还有wi-fi、蓝牙、红外线、超宽带、rfid、zigbee、动作捕捉和超声波。
4.wi-fi定位技术有两种,一种是通过移动设备和三个无线网络接入点的无线信号强度,通过差分算法,来比较精准地对人和车辆的进行三角定位。另一种是事先记录巨量的确定位置点的信号强度,通过用新加入的设备的信号强度对比拥有巨量数据的数据库,来确定位置。wi-fi定位可以在广泛的应用领域内实现复杂的大范围定位、监测和追踪任务,总精度比较高,但是用于室内定位的精度只能达到2米左右,无法做到精准定位。由于wi-fi路由器和移动终端的普及,使得定位系统可以与其他客户共享网络,硬件成本很低,而且wi-fi的定位系统可以降低了射频干扰可能性。wi-fi定位适用于对人或者车的定位导航,可以于医疗机构、主题公园、工厂、商场等各种需要定位导航的场合。
5.红外线室内定位有两种,第一种是被定位目标使用红外线ir标识作为移动点,发射调制的红外射线,通过安装在室内的光学传感器接收进行定位;第二种是通过多对发射器和接收器织红外线网覆盖待测空间,直接对运动目标进行定位。红外线的技术已经非常成熟,用于室内定位精度相对较高,但是由于红外线只能视距传播,穿透性极差(可以参考家里的电视遥控器),当标识被遮挡时就无法正常工作,也极易受灯光、烟雾等环境因素影响明显。加上红外线的传输距离不长,使其在布局上,无论哪种方式,都需要在每个遮挡背后、甚至转角都安装接收端,布局复杂,使得成本提升,而定位效果有限。红外线室内定位技术比较适用于实验室对简单物体的轨迹精确定位记录以及室内自走机器人的位置定位。
6.射频识别室内定位技术利用射频方式,固定天线把无线电信号调成电磁场,附着于物品的标签进过磁场后感应电流生成把数据传送出去,以多对双向通信交换数据以达到识别和三角定位的目的。(感应门禁卡和商场防盗系统用的就是这种技术)射频识别室内定位技术作用距离很近,但它可以在几毫秒内得到厘米级定位精度的信息,且由于电磁场非视距等优点,传输范围很大,而且标识的体积比较小,造价比较低。但其不具有通信能力,抗干扰能力较差,不便于整合到其他系统之中,且用户的安全隐私保障和国际标准化都不够完善。射频识别室内定位已经被仓库、工厂、商场广泛使用在货物、商品流转定位上。
7.蓝牙室内定位技术最大的优点是设备体积小、短距离、低功耗,容易集成在手机等移动设备中。只要设备的蓝牙功能开启,就能够对其进行定位。蓝牙传输不受视距的影响,但对于复杂的空间环境,蓝牙系统的稳定性稍差,受噪声信号干扰大且在于蓝牙器件和设备的价格比较昂贵。蓝牙室内定位主要应用于对人的小范围定位,例如单层大厅或商店。
8.超声波定位主要采用反射式测距(发射超声波并接收由被测物产生的回波后,根
据回波与发射波的时间差计算出两者之间的距离),并通过三角定位等算法确定物体的位置。超声波定位整体定位精度较高、系统结构简单,但容易受多径效应和非视距传播的影响,降低定位精度;同时,它还需要大量的底层硬件设施投资,总体成本较高。
9.可以看出,市面上的定位方式虽然采用了不同的技术实现,但均由其优缺点,例如:超声波定位虽然整体定位精度较高、系统结构简单,但一方面,超声波数据承载量不高,信息传递有一定的局限性,另一方面,超声定位的精度依赖于硬件和超声信号质量,定位出现误差时,无法对其进行纠正。因而,单一技术的定位方式已难以满足日益复杂的定位需求。
技术实现要素:
10.本发明的目的是提供一种蓝牙与超声结合的精确定位方法,该定位方法解决了现有技术中单一超声定位精度出现偏差时,无法有效校正的问题,还解决了超声信息承载量不足,大容量信息传递无法依赖超声实现的问题。
11.为达到上述目的,本发明采用的技术方案是:一种蓝牙与超声结合的精确定位方法,包括以下步骤:
12.s1:被定位设备扫描蓝牙定位信号,发现唤醒字段后记录唤醒字段对应的蓝牙发射端;
13.s2:对比记录的蓝牙发射端的信号强度,保留信号强度前k个的蓝牙发射端,k≥3;
14.s31:采用s2中的至少3个蓝牙发射端进行定位,获得蓝牙坐标数据;同时,解码蓝牙定位信号中携带的超声发射端信息,调用被定位设备麦克风,当无法调用时,输出蓝牙坐标数据并随被定位设备移动重复步骤s1至s3;
15.s32:当能够调用麦克风时,打开麦克风,开启超声发射端进行定位,获得超声坐标数据;
16.其中,每一个超声发射端与一个蓝牙发射端集成设置,超声定位前,被定位设备收听前k个蓝牙发射端所对应超声发射端的超声定位信号,选择超声定位信号质量最好的最佳超声发射端作为定位对象;
17.s4:融合s31和s32得到的坐标数据并输出,随被定位设备移动重复步骤s1至s4。
18.上述技术方案中进一步改进的方案如下:
19.1.上述方案中,其特征在于,在步骤s32中,被定位设备比对收听到的超声定位信号的能量峰值,标记能量峰值最大的为最佳超声发射端。
20.2.上述方案中,当两个不同超声定位信号的能量峰值接近或相同时,比对超声定位信号飞行/到达时间,取飞行时间更短/到达时间最快的作为最佳超声发射端。
21.3.上述方案中,在步骤s31中,蓝牙发射端与被定位设备采用信号强度定位法。
22.4.上述方案中,在步骤s32中,超声发射端具有至少3个扬声器单元,采用tdoa定位法。
23.5.上述方案中,在步骤s31和s32中,将蓝牙坐标数据和超声坐标数据转换为蓝牙经纬坐标数据和超声经纬坐标数据。
24.6.上述方案中,融合所述坐标数据的方法为卡尔曼数据融合法。
25.7.上述方案中,根据被定位设备移动趋势,启动运动方向对应的超声发射端,接力
定位交互。
26.8.上述方案中,当被定位设备失去蓝牙定位信号后,开启gps,接力定位输出坐标数据。
27.由于上述技术方案的运用,本发明与现有技术相比具有下列优点:
28.1、本发明一种蓝牙与超声结合的精确定位方法,通过集成蓝牙定位技术和超声定位技术,利用数据融合消除部分定位点位偏差过大的数据,提高定位精度,同时利用蓝牙承载信息传递功能,在实现精确定位的同时,低功耗实现数据的上传与下载,便于定位数据融合。
29.2、本发明一种蓝牙与超声结合的精确定位方法,通过将蓝牙发射端和超声发射端集成设计,使用蓝牙信号强度进行一次定位,在获得蓝牙定位数据的同时,利用信号强度筛选,获得了离用户最近的至少3个超声发射端,用户位于至少一个上述超声发射端的辐角内,进一步比对上述超声发射端的信号能量峰值及飞行时间/到达时间,从而得到超声定位信号质量最佳的超声发射端,采用此超声发射端与被定为设备交互即可提高定位精度。
30.3、本发明一种蓝牙与超声结合的精确定位方法,将相对坐标数据转化为经纬坐标数据,有利于被定位设备确认自身在更大范围地图中的具体位置,便于将室内定位数据与gps定位数据对接融合,实现无缝切换。
附图说明
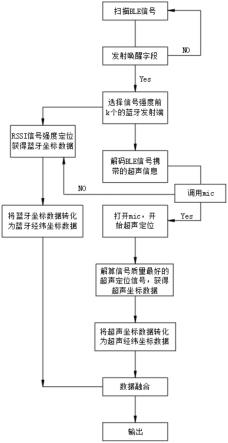
31.附图1为本发明一种蓝牙与超声结合的精确定位方法的流程示意图。
具体实施方式
32.实施例1:一种蓝牙与超声结合的精确定位方法,参照附图1,包括以下步骤:
33.s1:被定位设备打开蓝牙功能,扫描蓝牙发射端发出的蓝牙定位信号,这里,蓝牙定位信号携带有特定唤醒字段、对应蓝牙发射端的唯一表示信息及蓝牙发射端坐标等信息,特定唤醒字段用于激活后续步骤,蓝牙发射端的唯一表示信息用于标识区分不同的蓝牙发射端,被定位设备读取到唤醒字段后即记录下唤醒字段对应的蓝牙发射端。
34.其中,被定位设备为便携式智能设备,如:手机、手表、平板、眼镜或定制化个人终端等。
35.s2:比对记录下的多个蓝牙发射端的信号强度(rssi值),保留信号强度前k个的蓝牙发射端,这里,k=3。
36.对接收的rssi值进行滤波(中值滤波/卡尔曼滤波)处理,采用阶段去噪和滑动平均滤波算法进行滤波,具体为:在设定范围内去除最大值和最小值噪声,按先入先出求取算术平均值。
37.s3:使用记录的3个蓝牙发射端进行rssi强度定位:根据处理过的rssi值及信号衰减模型,求出每个蓝牙发射端到被定位设备的距离,以每个蓝牙发射端为球心,以对应距离为半径作球,找到三球交点,排除不可能的交点位置,得到被定位设备坐标。
38.但是,由于现实环境的干扰,三球并不会交于一点,因而需要利用加权质心算法,解算出质心坐标,作为被定位设备坐标点,获得蓝牙坐标数据。
39.同时,被定位设备解码蓝牙定位信号中携带的超声发射端信息,调用麦克风,当无
法调用麦克风时,输出蓝牙坐标数据作为结果。无法调用麦克风存在两种情况:
①
被定位设备自身不具备麦克风单元,调用指令无效;
②
被定位设备虽然具有麦克风单元,但定位程序无法控制麦克风。
40.提前设定有定位更新频率,随更新频率重复步骤s1~s3,输出定位结果。
41.实施例2:一种蓝牙与超声结合的精确定位方法,参照附图1,包括以下步骤:
42.s1:被定位设备打开蓝牙功能,扫描蓝牙发射端发出的蓝牙定位信号,这里,蓝牙定位信号携带有特定唤醒字段、对应蓝牙发射端的唯一表示信息及蓝牙发射端坐标等信息,特定唤醒字段用于激活后续步骤,蓝牙发射端的唯一表示信息用于标识区分不同的蓝牙发射端,被定位设备读取到唤醒字段后即记录下唤醒字段对应的蓝牙发射端。
43.其中,被定位设备为便携式智能设备,如:手机、手表、平板、眼镜或定制化个人终端等。
44.s2:比对记录下的多个蓝牙发射端的信号强度(rssi值),保留信号强度前k个的蓝牙发射端,这里,k=4。
45.对接收的rssi值进行滤波(中值滤波/卡尔曼滤波)处理,采用阶段去噪和滑动平均滤波算法进行滤波,具体为:在设定范围内去除最大值和最小值噪声,按先入先出求取算术平均值。
46.s31:使用记录的4个蓝牙发射端进行rssi强度定位:根据处理过的rssi值及信号衰减模型,求出每个蓝牙发射端到被定位设备的距离,以每个蓝牙发射端为球心,以对应距离为半径作球,找到三球交点,排除不可能的交点位置,得到被定位设备坐标,这里,第四个蓝牙发射端可用于直接排除不可能的交点。
47.但是,由于现实环境的干扰,三球并不会交于一点,因而需要利用加权质心算法,解算出质心坐标,作为被定位设备坐标点,获得蓝牙坐标数据。
48.同时,被定位设备解码蓝牙定位信号中携带的超声发射端信息,调用麦克风。
49.s32:打开麦克风,接收超声发射端发出的超声定位信号,这里,每一个超声发射端与一个蓝牙发射端集成设置,被定位设备打开麦克风后,只需要记录前k个蓝牙发射端所对应超声发射端的超声定位信号,选择超声定位信号质量最好的最佳超声发射端作为定位对象。
50.其中,为了找到质量最好的“最佳超声发射端”,通过以下方法进行比对,被定位设备收听到k个超声定位信号后,采用ofdm、fbmc和cdma其中的一种频谱分析提取超声定位信号能量值特征。这里,超声波为机械波,能量值与振幅成正比,在所有超声发射端初始信号强度一致时,到达被定位设备能量值越大,峰值越高,超声定位信号质量越好,标记能量峰值最大的为最佳超声发射端。
51.每个超声发射端具有至少3个呈拓扑结构排列的扬声器单元,最佳超声发射端的4个扬声器单元同步发出带有超声发射端唯一表示信息的超声定位信号,且不同扬声器单元发出的超声定位信号具有自身坐标信息,被定位设备收听到4个扬声器单元的超声定位信号后,采用tdoa进行超声定位,获得被定位设备的超声坐标数据。
52.在对能量峰值进行对比,出现两个不同的超声定位信号的能量峰值接近或相同时,进一步比对两个超声定位信号的飞行时间/到达时间,取时间最短/最先到达的超声定位信号对应的超声发射端为最佳超声发射端。
53.s4:融合s31和s32得到的蓝牙坐标数据和超声坐标数据并输出,输出结果显示在后台服务器或云端上,同步显示至被定位设备的显示界面,供用户获知自己位置,而随着用户携带被定位设备移动,重复步骤s1~s4,实现不间断实时定位。
54.融合上述坐标数据的方法为卡尔曼数据融合法,蓝牙坐标数据与超声坐标数据均存在误差,通过卡尔曼数据融合法既减小定位误差,又在蓝牙或超声信号出现误差时,置信另一定位数据,维持定位精度,保证定位效果。
55.输出坐标数据时,根据使用场景可以选择以下两种方法中的至少一种:
56.①
以定位环境建模地图中的任一点为(0,0,0),得到布置的所有超声发射端的坐标,从而在定位后输出相对坐标数据;
57.②
基于
①
,将定位环境地图与外界经纬坐标对接,将蓝牙坐标数据及超声鼠标数据转化为经纬坐标数据输出。
58.实施例3:一种蓝牙与超声结合的精确定位方法,包括以下步骤:
59.s1:被定位设备打开蓝牙功能,扫描蓝牙发射端发出的蓝牙定位信号,这里,蓝牙定位信号携带有特定唤醒字段、对应蓝牙发射端的唯一表示信息及蓝牙发射端坐标等信息,特定唤醒字段用于激活后续步骤,蓝牙发射端的唯一表示信息用于标识区分不同的蓝牙发射端,被定位设备读取到唤醒字段后即记录下唤醒字段对应的蓝牙发射端。
60.其中,被定位设备为便携式智能设备,如:手机、手表、平板、眼镜或定制化个人终端等。
61.s2:比对记录下的多个蓝牙发射端的信号强度(rssi值),保留信号强度前k个的蓝牙发射端,这里,k=4。
62.对接收的rssi值进行滤波(中值滤波/卡尔曼滤波)处理,采用阶段去噪和滑动平均滤波算法进行滤波,具体为:在设定范围内去除最大值和最小值噪声,按先入先出求取算术平均值。
63.s31:使用记录的4个蓝牙发射端进行rssi强度定位:根据处理过的rssi值及信号衰减模型,求出每个蓝牙发射端到被定位设备的距离,以每个蓝牙发射端为球心,以对应距离为半径作球,找到三球交点,排除不可能的交点位置,得到被定位设备坐标,这里,第四个蓝牙发射端可用于直接排除不可能的交点。
64.但是,由于现实环境的干扰,三球并不会交于一点,因而需要利用加权质心算法,解算出质心坐标,作为被定位设备坐标点,获得蓝牙坐标数据。
65.同时,被定位设备解码蓝牙定位信号中携带的超声发射端信息,调用麦克风。
66.s32:打开麦克风,接收超声发射端发出的超声定位信号,这里,每一个超声发射端与一个蓝牙发射端集成设置,被定位设备打开麦克风后,只需要记录前k个蓝牙发射端所对应超声发射端的超声定位信号,选择超声定位信号质量最好的最佳超声发射端作为定位对象。
67.其中,为了找到质量最好的“最佳超声发射端”,通过以下方法进行比对,被定位设备收听到k个超声定位信号后,采用ofdm、fbmc和cdma其中的一种频谱分析提取超声定位信号能量值特征。这里,超声波为机械波,能量值与振幅成正比,在所有超声发射端初始信号强度一致时,到达被定位设备能量值越大,峰值越高,超声定位信号质量越好,标记能量峰值最大的为最佳超声发射端。
68.每个超声发射端具有至少3个呈拓扑结构排列的扬声器单元,最佳超声发射端的4个扬声器单元同步发出带有超声发射端唯一表示信息的超声定位信号,且不同扬声器单元发出的超声定位信号具有自身坐标信息,被定位设备收听到4个扬声器单元的超声定位信号后,采用tdoa进行超声定位,获得被定位设备的超声坐标数据。
69.在对能量峰值进行对比,出现两个不同的超声定位信号的能量峰值接近或相同时,进一步比对两个超声定位信号的飞行时间/到达时间,取时间最短/最先到达的超声定位信号对应的超声发射端为最佳超声发射端。
70.s4:融合s31和s32得到的蓝牙坐标数据和超声坐标数据并输出,输出结果显示在后台服务器或云端上,同步显示至被定位设备的显示界面,供用户获知自己位置。
71.融合上述坐标数据的方法为卡尔曼数据融合法,蓝牙坐标数据与超声坐标数据均存在误差,通过卡尔曼数据融合法既减小定位误差,又在蓝牙或超声信号出现误差时,置信另一定位数据,维持定位精度,保证定位效果。
72.输出坐标数据时,根据使用场景可以选择以下两种方法中的至少一种:
73.①
以定位环境建模地图中的任一点为(0,0,0),得到布置的所有超声发射端的坐标,从而在定位后输出相对坐标数据;
74.②
基于
①
,将定位环境地图与外界经纬坐标对接,将蓝牙坐标数据及超声鼠标数据转化为经纬坐标数据输出。
75.s5:根据上述步骤得到被定位设备坐标,用户携带被定位设备移动时,根据移动趋势:用户逐渐离开当前最佳超声发射端,向附近的另一超声发射端接近时,启用该超声发射端接力定位交互,无需重复s1至s4的步骤,降低功耗和计算量提高定位速度。当接力定位坐标出现漂移等大误差行为时,重启蓝牙,重复步骤s1至s4,进行校准修正。
76.另外,当被定位设备失去蓝牙定位信号/超声定位信号后,开启gps,接力定位输出经纬坐标数据,实现室内与室外的衔接定位。
77.通过集成蓝牙定位技术和超声定位技术,利用数据融合消除部分定位点位偏差过大的数据,提高定位精度,同时利用蓝牙承载信息传递功能,在实现精确定位的同时,低功耗实现数据的上传与下载,便于定位数据融合。
78.通过将蓝牙发射端和超声发射端集成设计,使用蓝牙信号强度进行一次定位,在获得蓝牙定位数据的同时,利用信号强度筛选,获得了离用户最近的至少3个超声发射端,用户位于至少一个上述超声发射端的辐角内,进一步比对上述超声发射端的信号能量峰值及飞行时间/到达时间,从而得到超声定位信号质量最佳的超声发射端,采用此超声发射端与被定为设备交互即可提高定位精度。
79.将相对坐标数据转化为经纬坐标数据,有利于被定位设备确认自身在更大范围地图中的具体位置,便于将室内定位数据与gps定位数据对接融合,实现无缝切换。
80.在上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1