一种室内外无缝定位方法、系统、设备及介质
1.本发明涉及信息系统技术领域,特别是涉及一种室内外无缝定位方法、系统、设备及介质。
背景技术:
2.在新一代信息技术新兴产业中,基于位置的服务(location based services,lbs)有着举足轻重的地位,在室外环境下,gps全球定位系统能够提供较为精确的位置服务,但受到“城市峡谷”中信号遮挡和多径效应的影响,卫星的定位信号衰弱,导致其欠缺室内定位能力。为了弥补卫星定位系统存在的定位盲区,室内定位技术飞速发展,出现了超宽带、近场通信、wifi、射频识别等室内定位技术,实现了室内的高精度定位。
3.随着基于位置服务领域的不断发展,lbs不再局限于单一的室内或室外定位服务,对于各种复杂场景中的位置服务也成为当前的研究热点。现阶段在室内外混合场景下,通常采用多种定位技术实现定位的无缝覆盖,实现了混合场景下的无缝定位,但在室内外交界区域容易出现定位技术反复切换的乒乓效应。为避免乒乓效应引起的运算浪费,有的学者提出基于阈值机制的智能切换算法,并在室内外交界区域将室内与室外的定位信息融合,实现不同场景下定位技术与精度的平滑过渡。有的学者进行多定位信息融合时,虽然实现了不同定位区域的流畅切换,但其对整体区域的无差别定位,忽略了不同定位技术的精度差异,导致某些区域的定位精度降低。
4.目前室内外无缝定位仍有很多亟待解决和改进的问题,通过对无缝定位技术的研究,保持并提高组合定位的精度非常重要。
技术实现要素:
5.本发明的目的是提供一种室内外无缝定位方法、系统、设备及介质,以实现室内外定位的平滑过渡和无缝连接。
6.为实现上述目的,本发明提供了如下方案:
7.一种室内外无缝定位方法,所述方法包括:
8.获取当前定位点的无线信号强度;
9.根据所述无线信号强度判断所述当前定位点所在的区域类型;所述区域类型包括:室内区域、室外区域和室内外交界区域;
10.当所述当前定位点位于室内区域时,采用wifi位置指纹定位技术确定所述当前定位点的位置坐标;当所述当前定位点位于室外区域时,采用gps定位技术确定所述当前定位点的位置坐标;当所述当前定位点位于室内外交界区域时,采用基于knn算法的室内外融合定位技术确定所述当前定位点的位置坐标;
11.所述采用基于knn算法的室内外融合定位技术确定所述当前定位点的位置坐标,具体包括:
12.采用wifi位置指纹定位技术确定所述当前定位点的在线位置指纹数据;
13.根据所述在线位置指纹数据及离线位置指纹数据库,将与所述当前定位点的加权指纹欧式距离最小的前k个参考点的位置坐标确定为k个近邻点的位置坐标;其中,k为正整数;所述离线位置指纹数据库为预先获取的包括多个不同参考点的位置坐标及对应的位置指纹数据的数据集合;
14.采用gps定位技术确定所述当前定位点的第k+1个近邻点的位置坐标;
15.根据所述在线位置指纹数据及所述离线位置指纹数据库,确定第k+1个近邻点与所述当前定位点的加权指纹欧式距离;
16.计算各所述近邻点与上一定位点的物理位置距离;
17.根据各所述近邻点的位置坐标、所述加权指纹欧式距离及所述物理位置距离,确定所述当前定位点的位置坐标。
18.可选地,所述根据所述在线位置指纹数据及离线位置指纹数据库,将与所述当前定位点的加权指纹欧式距离最小的前k个参考点的位置坐标确定为k个近邻点的位置坐标,具体包括:
19.计算所述当前定位点与所述离线位置指纹数据库中各参考点的无线访问接入点的信号强度差值小于设定值的概率;
20.根据所述在线位置指纹数据及所述离线位置指纹数据库,计算所述当前定位点与各所述参考点的指纹欧式距离;
21.根据所述概率及所述指纹欧式距离,计算所述当前定位点与各所述参考点的加权指纹欧式距离;
22.比较各所述加权指纹欧式距离的大小,并将与所述当前定位点的加权指纹欧式距离最小的前k个参考点的位置坐标确定为k个近邻点的位置坐标。
23.可选地,所述采用gps定位技术确定所述当前定位点的第k+1个近邻点的位置坐标,具体包括:
24.获取所述当前定位点的大地坐标;
25.将所述大地坐标转换为高斯平面坐标;
26.根据转换参数矩阵,将所述高斯平面坐标转换为室内位置坐标,并将所述室内位置坐标确定为所述当前定位点的第k+1个近邻点的位置坐标;所述参数转换矩阵是根据至少两组已知的室内位置坐标及对应的高斯平面坐标确定的。
27.可选地,所述根据各所述近邻点的位置坐标、所述加权指纹欧式距离及所述物理位置距离,确定所述当前定位点的位置坐标,具体包括:
28.将与上一定位点的物理位置距离在设定范围内的近邻点作为目标近邻点;
29.根据所述加权指纹欧式距离及所述物理位置距离,确定所述当前定位点与各所述目标近邻点的相似度权重系数;
30.根据各所述目标近邻点的位置坐标及各所述相似度权重系数,确定所述当前定位点的位置坐标。
31.可选地,所述设定范围为[r-0.5,r+0.5]米;其中,r为被定位物体的单位移动距离,是根据相邻两个历史定位点的物理位置距离确定的。
[0032]
可选地,所述根据所述概率及所述指纹欧式距离,计算所述当前定位点与各所述参考点的加权指纹欧式距离,具体公式为:
[0033][0034]
其中:d
0,i
为所述当前定位点与第i个参考点的加权指纹欧式距离;pi为所述当前定位点与第i个参考点的无线访问接入点的信号强度差值小于设定值的概率;ei为所述当前定位点与第i个参考点的指纹欧式距离。
[0035]
可选地,所述根据所述加权指纹欧式距离及所述物理位置距离,确定所述当前定位点与各所述目标近邻点的相似度权重系数,具体公式为:
[0036][0037]
其中:wi为所述当前定位点与第i个目标近邻点的相似度权重系数;d
1,i
为所述当前定位点与第i个目标近邻点的加权指纹欧式距离;li为第i个目标近邻点与上一定位点的物理位置距离;k0为目标近邻点的个数,且k0≤k+1。
[0038]
本发明还提供一种室内外无缝定位系统,所述系统应用于上述方法,所述系统包括:
[0039]
信号强度获取模块,用于获取当前定位点的无线信号强度;
[0040]
区域类型确定模块,用于根据所述无线信号强度判断所述当前定位点所在的区域类型;所述区域类型包括:室内区域、室外区域和室内外交界区域;
[0041]
室内区域位置坐标确定模块,用于当所述当前定位点位于室内区域时,采用wifi位置指纹定位技术确定所述当前定位点的位置坐标;
[0042]
室外区域位置坐标确定模块,用于当所述当前定位点位于室外区域时,采用gps定位技术确定所述当前定位点的位置坐标;
[0043]
室内外交界区域位置坐标确定模块,用于当所述当前定位点位于室内外交界区域时,采用基于knn算法的室内外融合定位技术确定所述当前定位点的位置坐标;
[0044]
所述室内外交界区域位置坐标确定模块,具体包括:
[0045]
在线位置指纹数据确定单元,用于采用wifi位置指纹定位技术确定所述当前定位点的在线位置指纹数据;
[0046]
第一近邻点确定单元,用于根据所述在线位置指纹数据及离线位置指纹数据库,将与所述当前定位点的加权指纹欧式距离最小的前k个参考点的位置坐标确定为k个近邻点的位置坐标;其中,k为正整数;所述离线位置指纹数据库为预先获取的包括多个不同参考点的位置坐标及对应的位置指纹数据的数据集合;
[0047]
第二近邻点确定单元,用于采用gps定位技术确定所述当前定位点的第k+1个近邻点的位置坐标;
[0048]
加权指纹欧式距离确定单元,用于根据所述在线位置指纹数据及所述离线位置指纹数据库,确定第k+1个近邻点与所述当前定位点的加权指纹欧式距离;
[0049]
物理位置距离计算单元,用于计算各所述近邻点与上一定位点的物理位置距离;
[0050]
当前定位点位置坐标确定单元,用于根据各所述近邻点的位置坐标、所述加权指纹欧式距离及所述物理位置距离,确定所述当前定位点的位置坐标。
[0051]
本发明还提供一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的室内外无缝定位方法。
[0052]
本发明还提供一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的室内外无缝定位方法。
[0053]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0054]
本发明提供的室内外无缝定位方法,结合了gps定位技术、wifi位置指纹定位技术及基于knn算法的室内外融合定位技术,能够实现室内外定位的平滑切换,保证多种场景下定位技术、算法、精度和覆盖范围的平滑过渡与无缝连接。
附图说明
[0055]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0056]
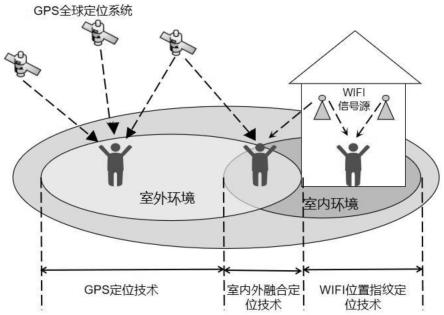
图1为本发明实施例提供的室内外无缝定位方法的原理图;
[0057]
图2为本发明实施例提供的室内外无缝定位方法的流程图;
[0058]
图3为本发明实施例提供的基于knn算法的室内外融合定位技术的流程图;
[0059]
图4为本发明实施例提供的室内外无缝定位系统的模块图。
[0060]
符号说明:信号强度获取模块—1,区域类型确定模块—2,室内区域位置坐标确定模块—3,室外区域位置坐标确定模块—4,室内外交界区域位置坐标确定模块—5,在线位置指纹数据确定单元—51,第一近邻点确定单元—52,第二近邻点确定单元—53,加权指纹欧式距离确定单元—54,物理位置距离计算单元—55,当前定位点位置坐标确定单元—56。
具体实施方式
[0061]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0062]
本发明的目的是提供一种室内外无缝定位方法、系统、设备及介质,以实现室内外定位的平滑过渡和无缝连接。
[0063]
针对当前室内外无缝定位存在的定位精度低、定位技术切换不流畅等缺陷,本发明通过对k最近邻(k-nearestneighbor,knn)算法的研究与改进,提出了一种基于gps与wifi位置指纹的室内外无缝定位方案。其中,室外采用gps定位,室内采用改进的wifi位置指纹定位,提高室内定位精度,室内外交界区域则采用改进后的knn算法融合室内外定位数据,实现不同定位技术的平滑切换。
[0064]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0065]
实施例一
[0066]
本实施例提供一种室内外无缝定位方法,图1为本发明实施例提供的室内外无缝定位方法的原理图,图2为本发明实施例提供的室内外无缝定位方法的流程图。如图1及图2所示,所述方法包括:
[0067]
步骤s1:获取当前定位点的无线信号强度。
[0068]
步骤s2:根据所述无线信号强度判断所述当前定位点所在的区域类型;所述区域类型包括:室内区域、室外区域和室内外交界区域。
[0069]
具体地,由于室外没有部署无线ap(即无线访问接入点),wifi信号逐渐减弱,最终失去定位能力。所以,本发明以wifi信号强度设立两个门限,即信号强度上限和信号强度下限(且信号强度上限高于信号强度下限),将信号最强,即无线信号强度高于信号强度上限的部分视为室内区域,将信号最弱,即无线信号强度低于信号强度下限的部分视为室外区域,将介于二者中间的部分视为室内外交界区域。
[0070]
步骤s3:当所述当前定位点位于室内区域时,采用wifi位置指纹定位技术确定所述当前定位点的位置坐标。
[0071]
在实际应用中,室内区域定位采用wifi位置指纹定位,主要依靠在线指纹数据与离线指纹数据库的位置匹配。传统位置指纹定位法以指纹欧氏距离衡量两点间的相似度差异,但简单的欧氏距离存在局限性,例如当某一点的在线指纹数据中有一个接收信号强度指示(received signal strength indicator,rssi)的采集存在较大误差,即使其余rssi与近邻的参考点相近,计算出的欧氏距离也会较大,从而导致该参考点不被选作近邻点。为降低简单欧氏距离带来的影响,本发明对当前定位点的欧氏距离赋予权重系数,以指纹数据的相似度为依据,计算待定位点与参考点的各ap信号强度差值小于设定值的概率,并以此概率的倒数作为欧氏距离的权重系数,所述设定值优选为1dbm。
[0072]
改进后的欧氏距离计算公式为:
[0073][0074][0075]
式中:di为待定位点与第i个参考点间的加权指纹欧氏距离(即改进后的指纹欧式距离);pi为信号强度差值小于1dbm的概率;rssi
ij
为当前定位点上实时采集到的第j个ap的rssi值;rssi
ij
为离线位置指纹数据中第i个参考点上采集到的第j个ap的rssi值;n
ap
为ap的个数;n
i(rssi-rssi)<1
表示信号强度差值小于1dbm的个数;n
ap
表示ap的个数。根据上述方法衡量两点间的指纹欧式距离,即可在离线位置指纹数据库中选择出距当前定位点最近的前k个近邻点。
[0076]
步骤s4:当所述当前定位点位于室外区域时,采用gps定位技术确定所述当前定位点的位置坐标。
[0077]
在实际应用中,室外gps定位系统采用的是大地坐标系(h,b,l),即大地经度l、大地纬度b和大地高度h。而室内定位系统一般采用的是平面坐标系(x,y),在室内外无缝定位中,需要将室内与室外的坐标系进行统一化处理。本发明采用高斯投影法进行室外定位系统的坐标转换,变换过程如下所示:
[0078]
首先将大地坐标(l,b)转换为高斯平面坐标(x,y):
[0079][0080][0081]
其中,t、m、η、l
p
均为计算过程中的中间参数,且有:t=sin b;m=l
p cos b;η=e
′
cos b;l
p
=l-l0;
[0082]
式中:w为子午线的弧长,n为所求点对应的卯酉圈子午线半径,e
′
为椭圆(地球形状接近椭球体又称“地球椭圆体”或“地球扁球体”,代表地球大小和形状的数学曲面,以长半径和扁率表示。因它十分迫近于椭球体,故通常以参考椭球体表示地球椭球体的形状和大小)的第二偏心率,b为所求点的纬度,l为所求点的经度,l0为3度带中央子午线的经度。
[0083]
然后,将得到的高斯平面坐标(x,y)转换为室内系统下的直角坐标(x,y)。需要确定至少两组相对应的(x,y)与(x,y)数据,计算转换参数矩阵u:
[0084][0085]
通过上述坐标转换即可得到室内坐标系下的位置坐标。在室内外交界区域则将该位置坐标作为knn定位算法中可供选择的一个近邻点。
[0086]
步骤s5:当所述当前定位点位于室内外交界区域时,采用基于knn算法的室内外融合定位技术确定所述当前定位点的位置坐标。
[0087]
具体地,室内外交界区域利用knn算法在wifi位置指纹定位的离线指纹库中选出前k个近邻点,并将gps的定位结果作为可选择的第k+1个近邻点,对该k+1个近邻点通过范围限定的方式进行判决,选择出更有价值的近邻点进行最终的定位估计。因此,室内外交界区域的定位综合考虑了gps定位结果和wifi位置指纹定位结果,准确性更高。
[0088]
图3为本发明实施例提供的基于knn算法的室内外融合定位技术的流程图。如图3所示,步骤s5具体包括:
[0089]
步骤s51:采用wifi位置指纹定位技术确定所述当前定位点的在线位置指纹数据。
[0090]
步骤s52:根据所述在线位置指纹数据及离线位置指纹数据库,将与所述当前定位点的加权指纹欧式距离最小的前k个参考点的位置坐标确定为k个近邻点的位置坐标;其中,k为正整数;所述离线位置指纹数据库为预先获取的包括多个不同参考点的位置坐标及对应的位置指纹数据的数据集合。
[0091]
步骤s52的具体流程如下:
[0092]
(1)计算所述当前定位点与所述离线位置指纹数据库中各参考点的无线访问接入点的信号强度差值小于设定值的概率。
[0093]
(2)根据所述在线位置指纹数据及所述离线位置指纹数据库,计算所述当前定位点与各所述参考点的指纹欧式距离。
[0094]
(3)根据所述概率及所述指纹欧式距离,计算所述当前定位点与各所述参考点的加权指纹欧式距离,具体公式为:
[0095][0096][0097]
其中:d
0,i
为所述当前定位点与第i个参考点的加权指纹欧式距离;pi为所述当前定位点与第i个参考点的无线访问接入点的信号强度差值小于设定值的概率;ei为所述当前定位点与第i个参考点的指纹欧式距离,其计算方法与步骤s3中相同,在此不作赘述。
[0098]
(4)比较各所述加权指纹欧式距离的大小,并将与所述当前定位点的加权指纹欧式距离最小的前k个参考点的位置坐标确定为k个近邻点的位置坐标。
[0099]
步骤s53:采用gps定位技术确定所述当前定位点的第k+1个近邻点的位置坐标。
[0100]
步骤s53的具体流程如下:
[0101]
(1)获取所述当前定位点的大地坐标。
[0102]
(2)将所述大地坐标转换为高斯平面坐标。
[0103]
(3)根据转换参数矩阵,将所述高斯平面坐标转换为室内位置坐标,并将所述室内位置坐标确定为所述当前定位点的第k+1个近邻点的位置坐标;所述参数转换矩阵是根据至少两组已知的室内位置坐标及对应的高斯平面坐标确定的。上述计算过程与步骤s4中相同,在此不作赘述。
[0104]
步骤s54:根据所述在线位置指纹数据及所述离线位置指纹数据库,确定第k+1个近邻点与所述当前定位点的加权指纹欧式距离。
[0105]
步骤s55:计算各所述近邻点与上一定位点的物理位置距离,具体公式为:
[0106][0107]
式中:li为第i个近邻点与上一定位点的物理位置距离;(x
pre
,y
pre
)为上一定位点的位置坐标;(xi,yi)为第i个近邻点的位置坐标。
[0108]
步骤s56:根据各所述近邻点的位置坐标、所述加权指纹欧式距离及所述物理位置距离,确定所述当前定位点的位置坐标。
[0109]
步骤s56的具体流程如下:
[0110]
(1)将与上一定位点的物理位置距离在设定范围内的近邻点作为目标近邻点。优选地,所述设定范围为[r-0.5,r+0.5]米;其中,r为被定位物体的单位移动距离,是根据相邻两个历史定位点的物理位置距离确定的。本发明采用上述范围限定的方式对k+1个近邻点进行判决:将上一定位点作为判决参考点,选择出距参考点r
±
0.5m的近邻点,作为目标近邻点。目标近邻点作为为当前定位点附近更有价值的近邻点,能够使后续的位置估计更准确。在本实施例中,r的取值为2。
[0111]
(2)根据所述加权指纹欧式距离及所述物理位置距离,确定所述当前定位点与各所述目标近邻点的相似度权重系数。
[0112]
在实际应用中,选择出符合条件的k0个近邻点后,采用权重决策机制进行定位估计,引入基于相似度的权重系数,对近邻点加权平均得到最终的定位估计点。采用指纹距离和物理位置距离衡量近邻点与待定位点的相似程度,由于当前定位点的实际位置未知,而连续采样时间内移动距离有限,故可将上一定位点与近邻点间的物理位置距离作为计算依
据。所述当前定位点与各所述目标近邻点的相似度权重系数的计算公式具体为:
[0113][0114]
式中:wi为所述当前定位点与第i个目标近邻点的相似度权重系数;d
1,i
为所述当前定位点与第i个目标近邻点的加权指纹欧式距离;li为第i个目标近邻点与上一定位点的物理位置距离;k0为目标近邻点的个数,且k0≤k+1。
[0115]
(3)根据各所述目标近邻点的位置坐标及各所述相似度权重系数,确定所述当前定位点的位置坐标。最终的定位结果表示为:
[0116][0117]
式中:(x,y)为当前定位点的位置坐标。
[0118]
实施例二
[0119]
为了执行上述实施例一对应的方法,以实现相应的功能和技术效果,下面提供一种室内外无缝定位系统,图4为本发明实施例提供的室内外无缝定位系统的模块图。如图4所示,所述系统包括:
[0120]
信号强度获取模块1,用于获取当前定位点的无线信号强度。
[0121]
区域类型确定模块2,用于根据所述无线信号强度判断所述当前定位点所在的区域类型;所述区域类型包括:室内区域、室外区域和室内外交界区域。
[0122]
室内区域位置坐标确定模块3,用于当所述当前定位点位于室内区域时,采用wifi位置指纹定位技术确定所述当前定位点的位置坐标。
[0123]
室外区域位置坐标确定模块4,用于当所述当前定位点位于室外区域时,采用gps定位技术确定所述当前定位点的位置坐标。
[0124]
室内外交界区域位置坐标确定模块5,用于当所述当前定位点位于室内外交界区域时,采用基于knn算法的室内外融合定位技术确定所述当前定位点的位置坐标。
[0125]
所述室内外交界区域位置坐标确定模块5,具体包括:
[0126]
在线位置指纹数据确定单元51,用于采用wifi位置指纹定位技术确定所述当前定位点的在线位置指纹数据。
[0127]
第一近邻点确定单元52,用于根据所述在线位置指纹数据及离线位置指纹数据库,将与所述当前定位点的加权指纹欧式距离最小的前k个参考点的位置坐标确定为k个近邻点的位置坐标;其中,k为正整数;所述离线位置指纹数据库为预先获取的包括多个不同参考点的位置坐标及对应的位置指纹数据的数据集合。
[0128]
第二近邻点确定单元53,用于采用gps定位技术确定所述当前定位点的第k+1个近邻点的位置坐标。
[0129]
加权指纹欧式距离确定单元54,用于根据所述在线位置指纹数据及所述离线位置指纹数据库,确定第k+1个近邻点与所述当前定位点的加权指纹欧式距离。
[0130]
物理位置距离计算单元55,用于计算各所述近邻点与上一定位点的物理位置距
离。
[0131]
当前定位点位置坐标确定单元56,用于根据各所述近邻点的位置坐标、所述加权指纹欧式距离及所述物理位置距离,确定所述当前定位点的位置坐标。
[0132]
实施例三
[0133]
本发明实施例还提供一种电子设备,包括存储器和处理器,该存储器用于存储计算机程序,该处理器用于运行计算机程序以使电子设备执行实施例一中的室内外无缝定位方法。所述电子设备可以是服务器。
[0134]
另外,本发明还提供一种计算机可读存储介质,其存储有计算机程序,该计算机程序被处理器执行时实现实施例一中的室内外无缝定位方法。
[0135]
目前室内外无缝定位仍有很多亟待解决和改进的问题,通过对无缝定位技术的研究,保持并提高组合定位的精度非常重要。本发明提出一种基于gps与wifi的室内外无缝定位方案,利用knn算法实现室内外定位的平滑切换,保证多种场景下定位技术、算法、精度和覆盖范围的平滑过渡与无缝连接。
[0136]
其中,室外采用gps定位,首先将其定位的经纬度数据转换为室内坐标系下的定位数据,以实现室内外数据的融合与切换。室内采用基于knn算法的wifi位置指纹定位,并对其距离度量与定位估计进行改进,提高室内定位的精度。室内外交界区域利用knn算法在wifi位置指纹定位的离线指纹库中选出前k个近邻点,并将gps的定位结果作为可选择的近邻点,对该k+1个近邻点通过范围限定的方式进行判决,选择出更有价值的近邻点进行最终的定位估计。与现有技术相比,本发明提出的室内外无缝定位方法解决了室内外无缝定位存在的定位精度低、定位技术切换不流畅等缺陷,有效提高了定位的精确度和稳定性。
[0137]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0138]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1