拍摄稳定装置及稳定拍摄控制方法与流程
本发明涉及工程用图像拍摄装置,尤其涉及一种拍摄稳定装置及稳定拍摄控制方法。
背景技术:
1、拍摄稳定装置是通过修正光学部件的运动、减小运动对成像的影响的装置,在有的装置中,装有一个陀螺传感器,它能检测振动并把它转化为电信号,这个信号经过镜头内置的计算机处理,控制一组修正光学部件作与胶片平面平行的移动,抵消振动引起的成像光线偏移。
2、图像拍摄装置与工程车辆、设备相结合,大大增强了工程车辆、设备的功能,例如,可以结合图像拍摄装置返回的画面,远程操作工程车辆、设备,操作人员远离工程现场,提高了作业的安全性和作业范围。
3、图像拍摄装置与工程机械结合应用时,一种普遍存在的缺点是由于工作环境恶劣,工作环境中振动引起图像拍摄装置拍摄的画面不清晰,还有一种情形是,在工程机械行进时,由于车辆的转弯、爬坡,导致图像拍摄装置不能够及时跟踪拍摄目标,操控过程中需要不断的调整图像拍摄装置的姿态,因此,给工程机械的操纵带来了困扰。
4、现有的一些拍摄稳定装置其针对消费产品的应用场景较多,对工程应用场景考虑较少,例如,防水、防尘效果不佳,不能直接应用于工程机械场景中。
5、基于此,需要开发设计出一种拍摄稳定装置及稳定拍摄控制方法。
技术实现思路
1、本发明实施方式提供了一种拍摄稳定装置及稳定拍摄控制方法,用于解决现有技术中图像拍摄装置容易受振动影响导致图像不清晰的问题。
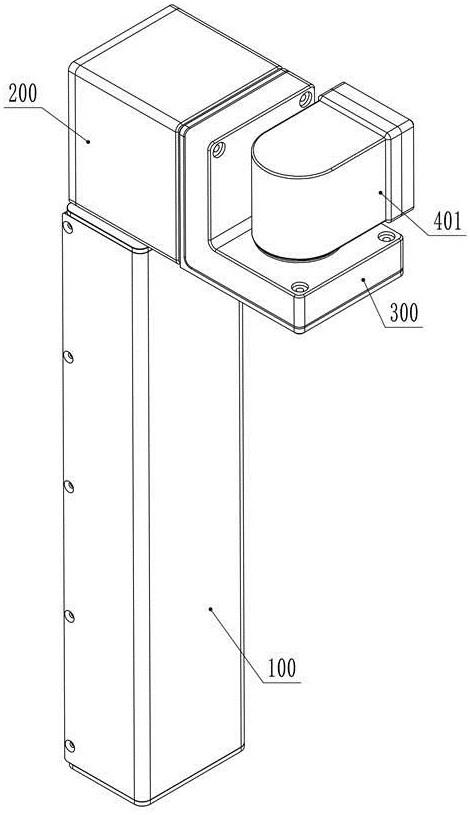
2、第一方面,本发明实施方式提供了一种拍摄稳定装置,包括:
3、升降部、俯仰部以及偏航部;
4、所述升降部包括第一电机、直线运动机构以及滑块,所述第一电机的输出轴与所述直线运动机构传动连接,所述直线运动机构带动所述滑块上下直线运动;
5、所述俯仰部包括第二电机、俯仰本体以及第一回转机构,所述俯仰本体与所述滑块固定连接,所述第二电机的本体与所述俯仰本体固定连接,所述第二电机的输出轴带动所述第一回转机构回转;
6、所述偏航部包括:第三电机、偏航本体以及第二回转机构,所述偏航本体与所述第一回转机构的回转部固定连接,所述第三电机的本体与所述偏航本体固定连接,所述第三电机的输出轴带动所述第二回转机构回转;
7、当图像拍摄装置固定于所述第二回转机构的回转部分时,通过所述第一电机、所述第二电机以及所述第三电机分别调整所述图像拍摄装置的高度、俯仰角以及偏航角,以稳定所述图像拍摄装置的姿态。
8、在一种可能实现的方式中,所述直线运动机构包括:升降本体以及丝杆;
9、所述第一电机的本体与所述升降本体固定连接,所述第一电机的输出轴与所述丝杆传动连接,所述滑块设有螺纹孔,所述滑块的螺纹孔与所述丝杆螺纹传动,所述滑块与所述升降本体滑动连接。
10、在一种可能实现的方式中,所述拍摄稳定装置还包括:伸缩套,所述第一回转机构包括:第一齿轮以及第二齿轮;
11、所述伸缩套为管状物,所述俯仰本体为下表面和右侧面开孔的腔体,所述伸缩套套设在所述丝杆的外部,所述伸缩套一端与所述滑块固定连接,所述伸缩套另一端与所述俯仰本体固定连接,所述伸缩套的内部与所述俯仰本体的内部构成一个连续的空间;
12、所述第一齿轮、所述第一电机以及所述第二电机均设置于所述俯仰本体的内部;
13、所述第一电机的本体固定设置于所述俯仰本体的内部,所述第一齿轮与所述第一电机的输出轴传动连接,所述第二齿轮设有凸台,所述第二齿轮的凸台与所述俯仰本体的右侧面孔转动连接,所述第二齿轮与所述第一齿轮啮合。
14、在一种可能实现的方式中,所述第二回转机构包括:第三齿轮、第四齿轮、第一锥齿轮以及第二锥齿轮;
15、所述偏航本体横截面为中空的l形,所述偏航本体的左侧面以及右上表面开有孔,所述第二齿轮的凸台凸出于所述俯仰本体的右侧外表面,所述偏航本体的左侧面孔与所述俯仰本体的右侧面孔连通,所述偏航本体的左侧面与所述第二齿轮的凸台固定连接,所述第二锥齿轮的齿部以及所述第一锥齿轮的齿部设置于所述偏航本体的内部;
16、所述第三电机固定设置于所述俯仰本体的内部,所述第三电机的输出轴与所述第三齿轮传动连接,所述第二齿轮设有孔,所述第三齿轮与所述第四齿轮啮合,所述第四齿轮、所述第一锥齿轮以及所述第二锥齿轮分别设有凸台,所述第四齿轮的凸台和/或所述第一锥齿轮的凸台与所述第二齿轮的孔间隙配合,所述第四齿轮的通过凸台与所述第一锥齿轮固定连接;
17、所述第二锥齿轮的凸台与所述偏航本体的右上表面孔转动连接,所述第二锥齿轮与所述第一锥齿轮啮合。
18、在一种可能实现的方式中,所述升降本体为上表面开孔的管状物,所述伸缩套与所述升降本体上表面的孔间隙配合;
19、所述第一电机、所述丝杆以及所述滑块分别设置于所述升降本体的内部,所述滑块与所述升降本体的内表面滑动连接。
20、在一种可能实现的方式中,所述拍摄稳定装置还包括:安装座,所述安装座位下表面和前表面开孔的腔体,所述第二锥齿轮的凸台凸出于所述偏航本体右上表面,所述安装座与所述第二锥齿轮的凸台固定连接,所述第二锥齿轮设有贯穿上下表面的孔,所述第二锥齿轮的孔与所述安装座的下表面孔连通。
21、第二方面,本发明实施方式提供了一种稳定拍摄控制方法,应用于如权利要求第一方面或第一方面的任一种可能的实现方式所述的拍摄稳定装置,所述稳定拍摄控制方法包括:
22、获取目标姿态,其中,所述目标姿态表征图像拍摄装置的目标姿态;
23、根据目标姿态以及图像拍摄装置的实际姿态,确定姿态偏差;
24、根据所述姿态偏差,控制所述第一电机、所述第二电机以及所述第三电机中至少之一对所述实际姿态进行调整,直至所述实际姿态与所述目标姿态一致。
25、在一种可能实现的方式中,图像拍摄装置的姿态包括高度、俯仰角以及偏航角,所述根据所述姿态偏差,控制所述第一电机、所述第二电机以及所述第三电机中至少之一对所述实际姿态进行调整,直至所述实际姿态与所述目标姿态一致,包括:
26、对于所述图像拍摄装置的姿态中的每一项,根据第一公式以及所述姿态的项偏差,控制相应的姿态项调整电机,对所述实际姿态的项进行调整,直至所述实际姿态的项与所述目标姿态的项一致;
27、其中,所述姿态项调整电机包括:所述第一电机、所述第二电机以及所述第三电机,所述姿态的项偏差为所述实际姿态的项与所述目标姿态的项的偏差,所述第一公式为:
28、
29、式中,为姿态的第项调整量,为姿态的第项比例权重,为姿态的第项积分权重,为姿态的第项微分权重,为姿态的第项偏差。
30、第三方面,本发明实施方式提供了一种终端,包括存储器以及处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第二方面或第二方面的任一种可能的实现方式所述方法的步骤。
31、第四方面,本发明实施方式提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第二方面或第二方面的任一种可能的实现方式所述方法的步骤。
32、本发明实施方式与现有技术相比存在的有益效果是:
33、本发明实施方式公开了的一种拍摄稳定装置,通过调整图像拍摄装置的高度、俯仰以及偏航,可以抵消工程机械在运动过程中带来的姿态的改变,稳定了图像拍摄装置的姿态,提高了拍摄图像的成像效果,便于对目标物进行跟踪。
34、本发明实施方式的拍摄稳定装置,将偏航部、俯仰部以及升降部的主要运动部件封闭于密封的腔体内部,可以实现较好的密封效果,防止灰尘和一般的泼溅水的进入,可以对抗恶劣的使用环境,适用于工程应用。
- 还没有人留言评论。精彩留言会获得点赞!