性能评测方法、装置、终端及存储介质与流程
本公开涉及终端,尤其涉及一种性能评测方法、装置、终端及存储介质。
背景技术:
1、目前,越来越多的终端采取屏下结构光成像的方式。但是,在屏下结构光成像的过程中,屏幕会造成性能损失,即屏幕会影响成像效果。
2、相关技术中,一般基于深度摄像头的性能评测方法对屏下结构光成像进行性能评测,评测结果无法很好地反应屏下结构光成像存在的性能损失情况。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种性能评测方法、装置、终端及存储介质。
2、根据本公开实施例的第一方面,提供一种性能评测方法,应用于终端,所述性能评测方法包括:
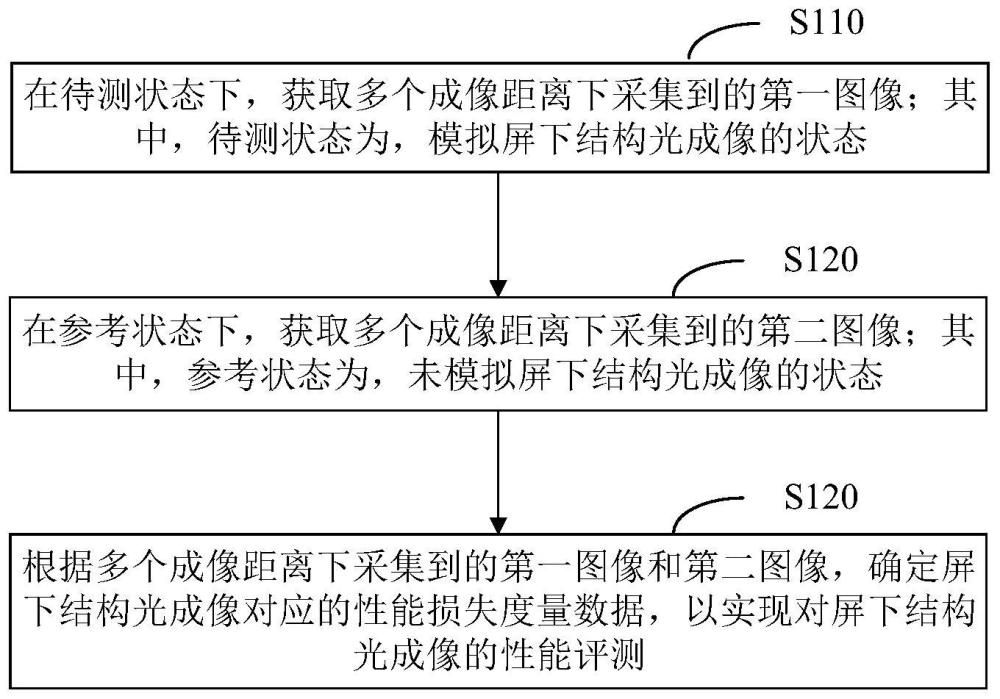
3、在待测状态下,获取多个成像距离下采集到的第一图像;其中,所述待测状态为,模拟屏下结构光成像的状态;
4、在参考状态下,获取所述多个成像距离下采集到的第二图像;其中,所述参考状态为,未模拟屏下结构光成像的状态;
5、根据所述多个成像距离下采集到的所述第一图像和所述第二图像,确定屏下结构光成像对应的性能损失数据,以实现对屏下结构光成像的性能评测。
6、可选地,所述根据所述多个成像距离下采集到的所述第一图像和所述第二图像,确定屏下结构光成像对应的性能损失数据,包括:
7、根据所述多个成像距离下采集到的所述第一图像和所述第二图像,确定所述待测状态与所述参考状态之间成像的清晰度差异数据、解码度差异数据以及图像错位数据;
8、根据所述清晰度差异数据、所述解码度差异数据以及所述图像错位数据,确定所述性能损失数据。
9、可选地,所述根据所述多个成像距离下采集到的所述第一图像和所述第二图像,确定所述待测状态与所述参考状态之间光成像的清晰度差异数据、解码度差异数据以及图像错位数据,包括:
10、根据所述多个成像距离下采集到的所述第一图像,确定所述多个成像距离对应的第一感兴趣区域;
11、根据所述多个成像距离下采集到的所述第二图像,确定所述多个成像距离对应的第二感兴趣区域;
12、根据所述多个成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域,确定所述清晰度差异数据、所述解码度差异数据以及所述图像错位数据。
13、可选地,所述根据所述多个成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域,确定所述清晰度差异数据,包括:
14、根据同一所述成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域,确定此成像距离对应的清晰度差异值;
15、根据所述多个成像距离对应的所述清晰度差异值,确定所述清晰度差异数据。
16、可选地,所述根据同一所述成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域,确定此成像距离对应的清晰度差异值,包括:
17、对同一所述成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域进行交叉熵处理或相对熵处理,以确定此成像距离对应的所述清晰度差异值。
18、可选地,所述根据所述多个成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域,确定所述解码度差异数据,包括:
19、根据所述第一感兴趣区域中多组相邻单位图像之间的匹配度,确定相应成像距离对应的第一匹配度序列;
20、根据所述第二感兴趣区域中多组相邻单位图像之间的匹配度,确定相应成像距离对应的第二匹配度序列;
21、根据同一所述成像距离对应的所述第一匹配度序列和所述第二匹配度序列,确定相应成像距离对应的解码度差异值;
22、根据所述多个成像距离对应的所述解码度差异值,确定所述解码度差异数据。
23、可选地,所述根据所述多个成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域,确定所述图像错位数据,包括:
24、从所述第二感兴趣区域中确定相应成像距离对应的目标单位图像;
25、从目标成像距离对应的所述第一感兴趣区域中,确定与相应所述目标单位图像的匹配的目标匹配图像;其中,所述目标成像距离为所述目标单位图像对应的成像距离;
26、将相互匹配的所述目标单位图像和所述目标匹配图像的坐标差值,确定为相应成像距离对应的图像错位值;
27、根据所述多个成像距离对应的所述图像错位值,确定所述图像错位数据。
28、可选地,所述根据所述清晰度差异数据、解码度差异数据以及图像错位数据,确定所述性能损失数据,包括:
29、分别对所述清晰度差异数据、所述解码度差异数据以及所述图像错位数据进行归一化处理,以确定清晰度差异归一化数据、解码度差异归一化数据以及图像错误归一化数据;
30、对所述清晰度差异归一化数据、所述解码度差异归一化数据以及所述图像错误归一化数据进行指数化处理,确定所述性能损失数据。
31、根据本公开实施例的第二方面,提供一种性能评测装置,应用于终端,所述性能评测装置包括:
32、获取模块,用于在待测状态下,获取多个成像距离下采集到的第一图像;其中,所述待测状态为,模拟屏下结构光成像的状态;
33、还用于在参考状态下,获取所述多个成像距离下采集到的第二图像;其中,所述参考状态为,未模拟屏下结构光成像的状态;
34、确定模块,用于根据所述多个成像距离下采集到的所述第一图像和所述第二图像,确定屏下结构光成像对应的性能损失数据,以实现对屏下结构光成像的性能评测。
35、可选地,所述确定模块,用于:
36、根据所述多个成像距离下采集到的所述第一图像和所述第二图像,确定所述待测状态与所述参考状态之间成像的清晰度差异数据、解码度差异数据以及图像错位数据;
37、根据所述清晰度差异数据、所述解码度差异数据以及所述图像错位数据,确定所述性能损失数据。
38、可选地,所述确定模块,用于:
39、根据所述多个成像距离下采集到的所述第一图像,确定所述多个成像距离对应的第一感兴趣区域;
40、根据所述多个成像距离下采集到的所述第二图像,确定所述多个成像距离对应的第二感兴趣区域;
41、根据所述多个成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域,确定所述清晰度差异数据、所述解码度差异数据以及所述图像错位数据。
42、可选地,所述确定模块,用于:
43、根据同一所述成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域,确定此成像距离对应的清晰度差异值;
44、根据所述多个成像距离对应的所述清晰度差异值,确定所述清晰度差异数据。
45、可选地,所述确定模块,用于:
46、对同一所述成像距离对应的所述第一感兴趣区域和所述第二感兴趣区域进行交叉熵处理或相对熵处理,以确定此成像距离对应的所述清晰度差异值。
47、可选地,所述确定模块,用于:
48、根据所述第一感兴趣区域中多组相邻单位图像之间的匹配度,确定相应成像距离对应的第一匹配度序列;
49、根据所述第二感兴趣区域中多组相邻单位图像之间的匹配度,确定相应成像距离对应的第二匹配度序列;
50、根据同一所述成像距离对应的所述第一匹配度序列和所述第二匹配度序列,确定相应成像距离对应的解码度差异值;
51、根据所述多个成像距离对应的所述解码度差异值,确定所述解码度差异数据。
52、可选地,所述确定模块,用于:
53、从所述第二感兴趣区域中确定相应成像距离对应的目标单位图像;
54、从目标成像距离对应的所述第一感兴趣区域中,确定与相应所述目标单位图像的匹配的目标匹配图像;其中,所述目标成像距离为所述目标单位图像对应的成像距离;
55、将相互匹配的所述目标单位图像和所述目标匹配图像的坐标差值,确定为相应成像距离对应的图像错位值;
56、根据所述多个成像距离对应的所述图像错位值,确定所述图像错位数据。
57、可选地,所述确定模块,用于:
58、分别对所述清晰度差异数据、所述解码度差异数据以及所述图像错位数据进行归一化处理,以确定清晰度差异归一化数据、解码度差异归一化数据以及图像错误归一化数据;
59、对所述清晰度差异归一化数据、所述解码度差异归一化数据以及所述图像错误归一化数据进行指数化处理,确定所述性能损失数据。
60、根据本公开实施例的第三方面,提供一种终端,所述终端包括:
61、处理器;
62、用于存储所述处理器可执行指令的存储器;
63、其中,所述处理器被配置为执行如第一方面所述的性能评测方法。
64、根据本公开实施例的第四方面,提供一种非临时性计算机可读存储介质,当所述存储介质中的指令由终端的处理器执行时,使得所述终端能够执行如第一方面所述的性能评测方法。
65、本公开的实施例提供的技术方案可以包括以下有益效果:本公开中,在模拟屏下结构光成像的状态下,采集多个成像距离下的第一图像;并在未模拟屏下结构光成像的状态下,采集相应多个成像距离下的第二图像;然后基于上述两种状态采集到的两类图像来实现对屏下结构光成像的性能评测。即,本公开从成像源头上进行性能评测,从而可以更加准确的确定屏下结构光成像对应的性能损失数据,对屏下结构光成像实现更加准确地性能评测。
66、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!