一种无人艇的高速光纤图像通信系统
1.本发明涉及无人艇的信息传输技术领域,具体为一种无人艇的高速光纤图像通信系统。
背景技术:
2.无人水面艇(usv)是指依靠船载传感器,以自主或半自主方式在水面航行的智能化平台,可广泛应用于海洋运输、海洋环境调查、海洋资源探测、海洋考古、水上搜救、情报搜集、海事训练测试、侦察取证、警戒巡逻、火力打击、舰艇护航、反水雷和反潜等任务。无人水面艇是网络化无人系统中的重要节点,将颠覆传统海战样式,催生全新海洋装备体系,对海洋资源开发和国家海洋权益维护具有重要的意义。
3.水中无人作战平台系统的通信联络是多个平台之间信息交换的主要方式。目前水下无人作战平台的通信方式主要有水声通信和光纤电缆通信两种,其中利用光纤电缆通信属于有线通信,它是利用电缆和光缆作为传输媒介来传递信息,它的特点是传输信号速度快、可靠性高,但是需要有光缆和电缆来连接两个工作单位,这就限制水中平台的作业范围和灵活性;而水声通信属于无线通信方式,它的作用距离取决于使用设备的载波频率和发射功率,它的传输速度比较低,传输信息的距离也十分有限,同时水声通信受到环境的影响也很大。研究水声通信是目前各个国家的发展的重点,他们主要集中于研究水声高速度、远距离传输技术和传输安全性等问题。目前美国还研制成功了利用激光在水中进行通信,其主要利用的是蓝绿激光通过空中单位发射与水下100米左右深度的潜水器进行通信,但是距离应用到水下作战平台上还有一定的距离。
4.目前行业内使用最广泛的就是常规的三分量检波器和压电晶体水听器采集四分量海洋地震数据。三分量检波器是多波勘探时使用的特种检波器。与单分量的常规地震检波器不同,每个检波器内装有三个互相垂直的传感器,以记录质点振动速度向量的三个分量,用于同时记录纵波、横波、转换波。这类检波器输出的信号电压和其振动的位移速度有关,因此称为速度检波器。为了记录检波器感应到的震动信号,检波器阵列内还设置有检波器输出的模拟信号放大、滤波、去噪、模数转换、数据存储和数据传输等电路模块,以便将三分量检波器阵列采集到的海洋地震数据通过数千米长的铠装电缆传送到拖曳作业船上的采集控制计算机里存储起来。从甲板上给远离拖曳作业船数公里甚至数十公里的海洋地震数据采集缆上众多的数据采集短节的供电也是十分困难的和非常有限的。此外,目前三分量检波器加水听器阵列采集的海洋四分量地震数据完全靠铠装电缆从数据采集缆向拖曳作业船传输,由于长距离(数千到数十千米)电缆数据传输的局限性,没有办法实现大量数据向拖曳作业船的高速实时传输。上面这些因素极大的限制了大道数或超大道数和大长度或超大长度海洋四分量地震检波器阵列(或四分量地震数据采集缆)技术的发展和推广应用。
5.光纤传输在交通上主要用于相关监控信号的稳定传输,以及以语言,数据,文字,图像为主要形式的综合业务网络数据的传输。在售票,防灾减灾,环境保护中由于其低延
时,高速率,抗干扰等特性可以十分稳定的传输相关数据,为人们生产生活提供了极大的便利。
技术实现要素:
6.本发明的目的在于提供一种无人艇的高速光纤图像通信系统,其总体逻辑设计都在fpga芯片内部完成,充分利用fpga并行处理优势,可以极大的提高系统的处理速度,系统的集成度更高,后期便于调试和升级,以解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:
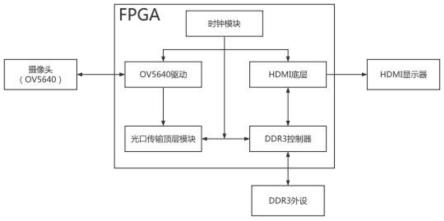
8.一种无人艇的高速光纤图像通信系统,包括fpga芯片、ov5640摄像头、ddr3外设设备和hdmi显示器;所述fpga芯片上集成有时钟模块、ov5640驱动模块、光口传输顶层模块、ddr3控制器和hdmi底层模块;所述时钟模块分别与ov5640驱动模块以及hdmi底层模块的一端相连,hdmi底层模块的另外一端与ddr3控制器的一端相连,所述ov5640驱动模块的另一端与光口传输顶层模块一端相连,并且光口传输顶层模块的另一端分别与时钟模块、ddr3控制器连接;
9.所述ov5640摄像头用于采集视频数据后与fpga芯片的输入端相连,fpga芯片对采集的数据处理后通过板载卡上两个光模块接口进行光纤的发送和接收,fpga芯片的输出接口与hdmi接口相连,再由hdmi接口将数据传送至hdmi显示器上显示出来。
10.优选的,所述时钟模块调用mmcm ip核,共输出4个时钟,频率分别为200mhz、50mhz时钟、65mhz时钟和325m时钟,其中,200mhz时钟作为ddr3控制器的参考时钟,由mig ip核产生的ui_clk作为ddr3控制器的驱动时钟,50mhz时钟作为ov5640驱动模块的驱动时钟和光口传输顶层模块的drp的输入时钟,65mhz时钟和325m时钟用于驱动hdmi底层模块。
11.优选的,所述ov5640驱动模块用于驱动ov5640接口总线,将像素时钟驱动下的传感器输出的场同步信号、行同步信号以及8位数据转换成ddr3读写控制模块能够读写的十六位信号,进行对ov5640传感器图像数据的采集。
12.优选的,所述ddr3控制器的读取和写入用于对ddr3芯片外存储器进行驱动,并对其进行缓冲,ddr3控制器将mig ip核心的复杂读写功能封装为一个与fifo相似的便于使用的用户界面。
13.优选的,所述hdmi底层模块用于驱动hdmi显示器的驱动信号的输出,同时为其它模块提供显示器参数、场同步信号和数据请求信号,hdmi底层模块例化了hdmi驱动模块,hdmi驱动模块用于产生行场信号和数据有效使能信号和像素点的横纵坐标,同时将内部信号数据请求信号输出至端口,用于从ddr3控制器中读取数据,完成读出图像数据的功能,hdmi驱动模块负责将rgb888格式的视频图像转换成tmds数据输出。
14.优选的,所述光口传输顶层模块包括光口编码模块、光口解码模块、光口文字对齐模块和gtp顶层模块;
15.其中,光口编码模块用于将ov5640摄像头输入进来的16bit数据转化为32bit数据,再按照8b10b的编码格式将数据发送到gtp顶层模块;
16.光口文字对齐模块用于将收到的错误信息转换成校准的资料,并将其输入光口解码模块;
17.光口解码模块用于将对齐后的资料转换成8b10b的象素资料,再用fifo把32bit的
资料转换成16bit的资料;
18.gtp顶层模块用于与fpga芯片进行数据的交流,同时生成多种定时序列进行光端口的传送和通讯。
19.与现有技术相比,本发明的有益效果是:
20.1、本发明提供的一种无人艇的高速光纤图像通信系统,将数传电台作为艇平台关键信息上传及监控系统控制指令下发的主传输通道,图传电台作为数据传输副通道,北斗短报文卫星通信只有在数传和图传电台均失效时开启发射功能,作为辅助通道,既能保证监控系统为无人艇平台不间断监控,又能保证信息的实时传输,同时可减少北斗短报文通信对卫星导航干扰频率,为无人艇的安全航行提供保障。
21.2、本发明提供的一种无人艇的高速光纤图像通信系统,极大地发挥了图传电台网络传输优势,既能保证无人艇监控摄像头视频信息、雷达回波、光电视频等信息的上传,又作为关键参数备用通道,有效地提高系统的冗余性,同时与现有卫星通信系统、光纤网络、短波、超短波等既有系统无缝对接,具有良好的兼容性,能够兼容各种ip应用。
22.3、本发明提供的一种无人艇的高速光纤图像通信系统,极大地发挥了图传电台网络传输优势,既能保证无人艇监控摄像头视频信息、雷达回波、光电视频等信息的上传,又作为关键参数备用通道,有效地提高系统的冗余性,同时与现有卫星通信系统、光纤网络、短波、超短波等既有系统无缝对接,具有良好的兼容性,能够兼容各种ip应用。
附图说明
23.图1为本发明实施例中的硬件总体设计框图;
24.图2为本发明实施例中的fpga顶层系统框图;
25.图3为本发明实施例中的fpga顶层原理图;
26.图4为本发明实施例中的ddr顶层模块原理图;
27.图5为本发明实施例中的光口传输顶层模块原理图;
28.图6为本发明实施例中的光口发送端状态图;
29.图7为本发明图3的前半部分放大图;
30.图8为本发明图3的后半部分放大图;
31.图9为本发明图4的前半部分放大图;
32.图10为本发明图4的后半部分放大图;
33.图11为本发明图5的前半部分放大图;
34.图12为本发明图5的后半部分放大图。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.如图1所示:本发明实施例中提供一种无人艇的高速光纤图像通信系统,包括fpga芯片、ov5640摄像头、ddr3外设设备和hdmi显示器;其中,fpga芯片选用xilinx公司artix7
系列xc7a35tfgg484i-2型fpga芯片装置;本发明主要通过ov5640摄像头采集视频数据后与fpga芯片的输入端后相连,fpga芯片对采集的数据处理后通过板载卡上两个光模块接口进行光纤的发送和接收,fpga芯片的输出接口与hdmi接口相连,最后由hdmi接口将数据传送出来在显示器上显示出来。
37.如图2所示:本发明实施例中的fpga芯片上集成有时钟模块、ov5640驱动模块、光口传输顶层模块、ddr3控制器和hdmi底层模块;时钟模块分别与ov5640驱动模块以及hdmi底层模块的一端相连,hdmi底层模块的另外一端与ddr3控制器的一端相连,所述ov5640驱动模块的另一端与光口传输顶层模块一端相连,并且光口传输顶层模块的另一端分别与时钟模块、ddr3控制器连接;其中,ov5640摄像头用于采集视频数据后与fpga芯片的输入端相连,fpga芯片对采集的数据处理后通过板载卡上两个光模块接口进行光纤的发送和接收,fpga芯片的输出接口与hdmi接口相连,再由hdmi接口将数据传送至hdmi显示器上显示出来。
38.如图3,图7-8所示:本发明实施例中的时钟模块调用mmcm ip核,共输出4个时钟,频率分别为200mhz(ddr3参考时钟)、50mhz时钟、65mhz时钟和325m时钟(hdmi像素时钟的5倍频)。200mhz时钟作为ddr3控制模块的参考时钟,由mig ip核产生的ui_clk(本次设计为100mhz)作为ddr3控制模块的驱动时钟,50mhz时钟作为ov5640驱动模块驱动时钟和光口传输顶层模块的drp的输入时钟,65mhz时钟和325m时钟(hdmi像素时钟的5倍频)负责驱动hdmi底层模块。
39.ov5640驱动模块用于驱动ov5640接口总线,将像素时钟驱动下的传感器输出的场同步信号、行同步信号以及8位数据转换成ddr3读写控制模块能够读写的十六位信号,以此来进行对ov5640传感器图像数据的采集。
40.ddr3控制器的读取和写入用于对ddr3芯片外存储器进行驱动,并对其进行缓冲,ddr3控制器将mig ip核心的复杂读写功能封装为一个与fifo相似的便于使用的用户界面。
41.hdmi底层模块用于驱动hdmi显示器的驱动信号的输出,同时为其它模块提供显示器参数、场同步信号和数据请求信号,hdmi底层模块例化了hdmi驱动模块(video_driver和hdmi驱动转换顶层模块(dvi_transmitter_top),hdmi驱动模块用于产生行场信号和数据有效使能信号和像素点的横纵坐标,同时将内部信号数据请求信号输出至端口,用于从ddr3控制器中读取数据,完成读出图像数据的功能,hdmi驱动模块负责将rgb888格式的视频图像转换成tmds数据输出。
42.光口传输顶层模块包括光口编码模块、光口解码模块、光口文字对齐模块和gtp顶层模块;
43.其中,光口传输顶层模块下面有4个子模块,分别是光口编码模块(sfp_encoder)、光口解码模块(sfp_decode)、光口字对齐模块(sfp_data_align)和gtp顶层模块(gt_aurora_exdes)。
44.光口编码模块(sfp_encoder):光口编码模块负责将摄像头输入进来的16bit数据转化为32bit数据,再按照8b10b的编码格式将数据发送到gtp顶层模块。
45.光口字对齐模块:光学口对齐模块是把收到的错误信息转换成校准的资料,并将其输入光口译码。
46.光口译码(sfp_decode):该光端口译码模块把对齐后的资料转换成8b10b的象素
资料,然后用fifo把32比特的资料转换成16比特的资料。
47.gtp的最上层模块(gt_aurora_exdes):gtp上层的一个主要功能是与fpga(fpga)进行数据的交流,同时还要生成多种定时序列来进行光端口的传送和通讯。
48.如图4,图9-10所示,ddr3控制器中的读取和写入可以分成背对背和不背对背两种情况。背对背,每一只钟都是连续的,没有间隔。而不是背对背的书写就是不连续的。
49.ddr3_rw模块能够读取和写入mig ip核心的定时,与mig ip核心进行数据和信号的交流,同时还能对读取和写入的结果进行判定,并发送指令信号led来判定出最终的效果。clk_wiz_0是本试验中的一个时钟,它主要用于生成mig ip内核所需要的系统时钟sys_clk_i以及clk_ref_i。mig_7series_0是mig ip内核,它既能与fpga(fpga)进行数据交换,又能生成多种定时,用于读取和写入ddr3。
50.如图5,图11-12所示,光口传输顶层模块下面有4个子模块,分别是光口编码装置(sfp_encoder)、光口解码装置(sfp_decode)、光口文字对齐装置(sfp_data_align)和gtp顶层装置(gt_aurora_exdes)。
51.光口编码装置的一端与光口解码装置的一端相连,光口解码装置的另一端相连与光口字对齐装置相连,光口字对齐装置的另一端与gtp顶层装置相连,且光口解码装置的另一端与gtp顶层装置相连。
52.如图6所示,光口发送端状态图,给出不同状态端的状态图,根据信号不同状态给出结果。
53.工作原理:光纤传输系统因其传输距离远,带宽大,抗干扰能力强等特点,成为了无人艇图像数据通信中主要的传输介质。本发明总体模块设计分为时钟模块、ov5640驱动模块、光口传输顶层模块、ddr3控制器和hdmi底层模块。由ov5640摄像头拍摄视频数据,向光口传输,经由ddr3进行读写操作,传输到hdmi接口输出,总体逻辑设计都在fpga芯片内部完成,充分利用fpga并行处理优势,可以极大的提高系统的处理速度,系统的集成度更高,后期便于调试和升级。
54.其次,ov5640是一种cmos数码影像感应器,其最大输出功率为500,000。ov5640支持多种数据像素格式,其中有yuv类型,rgb类型以及raw等原始类型的,可以通过寄存器地址0x4300进行配置。此次所产生图像主要通过lcd进行显示,所以需要把ov5640摄像头的图像像素的类型设置成rgb565格式。ov5640摄像头模块支持通过改变rgb565的输出格式的颜色的次序来进行输出。为了让ov5640能够正常工作,首先需要对其进行初始化,也就是将寄存器设定初始化,同时也可以获得更好的画面质量。由于sccb与iic的写入传输协议基本一致,所以本发明可以直接利用iic的驱动来进行相机的配置,当然,也不是所有的寄存器都要配置,大部分的寄存器都是缺省的。
55.hdmi是用来替代像scart或者rca这样的老式的模拟音频传输端口。在dvi系统中,三个信道分别传送红、绿、蓝三个色彩成分(rgb4:4:4的形式)。hdmi还采用了三条rgb信道,hdmi可以在不同的情况下,通过ycrcb4:4:4或者ycrcb4:2:2的方式传送图像。第四信道是传送象素的时钟信道。采用tmds的时钟信道作为接收机的基准,以确保接收方可以正常地进行数据的还原。若每一象素的色彩深度是24比特,也就是rgb中的每一色彩成分都有8比特,则该信道上的色彩资料会由8b/10b的编码机变换为10比特的象素符号。然后用并行变换器把10比特的字元转化为串行数据,再经过tmds的通道传送。此10∶1并行处理产生的串
口数据比率是真实像素的十倍。在视频图象的传输中,使用数据信道传送都是有用的像素数据。在这个信道上使用的是一种控制字符。每一条信道上都有二个控制输入页面,它们有个四种不完全相同的控制符号。
56.ddr3的读取和写入都包括一个写入指令,该写入指令的数值为0,而读取运算app_cmd的数值为1。首先看看显示的写入指令顺序,检验app_rdy,如果是高,表示这时ip内核指令已经就绪,可以在当前的时钟上将app_en调高,并将指令(app_cmd)和一个地址(app_addr),这时向下写入指令和地址。
57.有三种情况可以正确地写写数据:
58.(1)在相同的节拍下,写入和写入指令定时同时进行;
59.(2)写入时间序列比写入指令时间早一步;
60.(3)写入时序最多滞后于写入指令时间的两个节拍;
61.根据上面的内容,编写顺序:第一步,要检查一下app_wdf_rdy,它是高的,表示ip内核的数据已经准备好了,可以从使用者发送的信息中得到一个写入(app_wdf_wren)。通过这种方式,再加入一个写入指令动作,就可以将资料写入到ip核心处。这是一个用于对写的信息进行掩码的app_wdf_mask,如果这个信号是高就会对对应的字节进行隐藏,而这个0的值不会被隐藏。
62.ddr3中的读取和写入可以分成背对背和不背对背两种情况。背对背,每一只钟都是连续的,没有间隔。而不是背对背的书写就是不连续的。
63.ddr3_rw模块能够读取和写入mig ip核心的定时,与mig ip核心进行数据和信号的交流,同时还能对读取和写入的结果进行判定,并发送指令信号led来判定出最终的效果。clk_wiz_0是本试验中的一个时钟,它主要用于生成mig ip内核所需要的系统时钟sys_clk_i以及clk_ref_i。mig_7series_0是mig ip内核,它既能与fpga进行数据交换,又能生成多种定时,用于读取和写入ddr3。
64.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1