一种快速对焦方法、摄像模组和计算机可读存储介质与流程
1.本技术涉及摄像对焦的技术领域,尤其是涉及一种快速对焦方法、摄像模组和计算机可读存储介质。
背景技术:
2.摄像就是通过相机记录历史,将某一瞬间的画面定格,使瞬间成为永恒,为了使更多人能够便利的进行摄像,手机通常都装有摄像模组。随着人们对摄像需求的提高和科技的进步,手机上装有的摄像模组参数越来越高,生产过程中对摄像模组的调试要求也随之提高。
3.手机上的摄像模组完成生产后,通常需要采用sfr(spatial frequency response,图像解析力算法)值找到对焦点,当模组对着某一固定距离图纸找sfr峰值点的过程中,通常是采用从初始dac点开始(dac点是vcm行程中的某一点),vcm大步走,当sfr值变化快速增大时,改为vcm小步走,直到sfr值连续三次下降,就认为vcm行程已经过了sfr峰值点。这时再回到sfr峰值点对应的dac位置,也就是vcm位置,确认此时的sfr值是所走的行程中最大的,就此确定镜头的焦点位置,从而完成对焦。虽然这种对焦方法能准确的找到对焦点,但是耗时大概10秒左右,每次对焦花费的时间成本较大,上述问题有待解决。
技术实现要素:
4.为了减少摄像模组的对焦时间,提高摄像模组的产能,本技术提供一种快速对焦方法、摄像模组和计算机可读存储介质,采用如下的技术方案:
5.第一方面,一种快速对焦方法,包括:
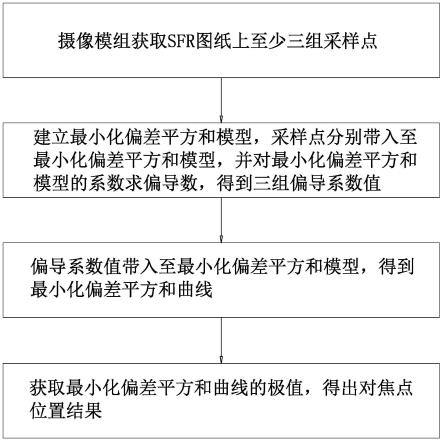
6.摄像模组获取sfr图纸上至少三组对焦采样点;
7.建立最小化偏差平方和模型,对焦采样点分别带入至最小化偏差平方和模型,并对最小化偏差平方和模型的系数求偏导数,得到三组偏导系数值;
8.偏导系数值带入至最小化偏差平方和模型,得到最小化偏差平方和曲线;
9.获取最小化偏差平方和曲线的极值,得出对焦点位置结果。
10.通过采用上述方案,摄像模组通过在sfr图纸上获取对焦采样点,通过获取到的对焦采样点建立最小化偏差平方和模型,通过对最小化偏差平方和模型的系数进行求解,从而得到偏导系数值,偏导系数值带入至最小化偏差平方和模型得到最小化偏差平方和曲线,最小化偏差平方和模型是通过最小化误差的平方和寻找数据的最佳函数匹配,保证所有采样数据偏差的平方和最小来拟合曲线,减少获取的对焦采样点数量,减少逐步试错的时间,从而达到减少摄像模组的对焦时间,提高摄像模组的产能的效果。
11.优选的,每组所述对焦采样点包括dac值和dac值所对应的sfr值;
12.dac值:vcm行程中其中一点的位置数值;
13.sfr值:图像解析力算法值,sfr值随着dac值的改变而改变。
14.通过采用上述方案,三组对焦采样点均包括采样dac值和对应dac值的sfr值,三组
对焦采样点分别带入到最小化偏差平方和模型中,从而求得偏导系数值,sfr值随着dac值的变化而变化,达到调节图像解析力的效果。
15.优选的,所述最小化偏差平方和模型为:y=ax2+bx+c,其中y为sfr值,x为dac值,a、b、c均为最小化偏差平方和模型的系数。
16.通过采用上述方案,dac值作为最小化偏差平方和模型的x带入到方程内,sfr值作为最小化偏差平方和模型的y带入到方程内,通过三组以上的方程求得a、b、c的具体数值,a、b、c的具体数值带入到最小化偏差平方和模型中,从而获得最小化偏差平方和曲线,最小化偏差平方和曲线能够根据对焦采样点的偏离位置判断对焦点的概率,达到直观的观察到对焦点的位置的效果。
17.优选的,所述对最小化偏差平方和模型的系数求偏导数具体步骤包括:
18.分别对a、b、c求偏导数,得到
19.a的偏导数矩阵方程:
20.b的偏导数矩阵方程:和
21.c的偏导数矩阵方程:
22.解a的偏导数矩阵方程、b的偏导数矩阵方程和c的偏导数矩阵方程,得到三组偏导系数值,偏导系数值带入最小化偏差平方和模型得到最小化偏差平方和曲线。
23.通过采用上述方案,通过矩阵方程解得三组偏导系数值,从而带入至最小化偏差平方和模型,获取到能够直观的观察到位置关系的最小化偏差平方和曲线,达到快速的判断对焦点的位置的效果。
24.优选的,所述摄像模组与sfr图纸垂直设置,且摄像模组与sfr图纸相距预设定的距离值。
25.通过采用上述方案,摄像模组通过和sfr图纸垂直相距一定的距离值,从而使摄像
模组恒定的捕捉到同一区域内的画面,达到确保对焦精度的效果。
26.优选的,所述距离值具体设定为20cm。
27.通过采用上述方案,摄像模组通过和sfr图纸垂直相距设定的20cm距离值,使摄像模组获取对焦采样点时,每次捕捉的画面相同,达到确保对焦精度的效果。
28.优选的,所述dac值的最小对焦采样点和dac值的最大对焦采样点跨越sfr图纸的峰值点。
29.通过采用上述方案,sfr图纸的sfr值通过dac值决定,摄像模组通过获取三组以上的sfr值和dac值从而求出最小化偏差平方和模型,dac值的最小对焦采样点和dac值的最大对焦采样点需要跨越sfr图纸的峰值点,才能使最小化偏差平方和模型计算得出对焦点位置结果,达到通过极值获得对焦点位置结果的效果。
30.优选的,所述sfr图像照射有补强光,使得摄像模组获取对焦采样点的偏差减小。
31.通过采用上述方案,在摄像模组获取sfr图像的对焦采样点数据时,sfr图纸的表面照射补强光,使得摄像模组能够清晰的获取对焦采样点,达到减少因环境光不足带来的数据偏差的效果。
32.第二方面,本技术提供一种摄像模组,所述摄像模组被设置为运行计算机程序以执行快速对焦算法。
33.通过采用上述方案,摄像模组用于运行快速对焦算法,从而实现摄像模组的快速对焦,达到减少摄像模组的对焦时间,提高摄像模组的产能的效果。
34.第三方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算程序,其中,所述计算机程序被设置为运行时执行快速对焦算法。
35.通过采用上述方案,计算机可读存储介质用于对计算机程序进行存储,从而使需要快速对焦时,获取计算机程序进而实现快速对焦测试,达到减少摄像模组的对焦时间,提高摄像模组的产能的效果。
36.综上所述,本技术包括以下至少一种有益技术效果:
37.摄像模组捕捉sfr图纸的画面,从而获取至少三个对焦采样点,通过获取到的对焦采样点建立最小化偏差平方和模型,对焦采样点带入到最小化偏差平方和模型,从而对最小化偏差平方和模型的系数求偏导系数值,偏导系数值重新带入到最小化偏差平方和模型,从而得到最小化偏差平方和曲线,最小化偏差平方和曲线初步的判断得到对焦点的位置,再通过计算得出最小化偏差平方和曲线的极值,从而获取对焦点位置结果,过程中减少了对焦采样点的数目和对焦采样点试错的过程,从而达到减少摄像模组的对焦时间,提高摄像模组的产能的效果。
附图说明
38.图1为本技术实施例一种快速对焦方法、摄像模组和计算机可读存储介质的流程示意图。
具体实施方式
39.以下结合附图1对本技术作进一步详细说明。
40.目前的寻找对焦点的方法,需要在vcm行程中进行大步走后再进行小步走,对各个
dac点逐一试错确认是否为对焦点,直到sfr值连续三次下降,就认为vcm行程已经过了sfr峰值点,从而退回到三步之前,此时的dac点位置为对焦点的位置。而逐一试错的过程需要耗费大量的时间,在生产的过程中,需要对大量的摄像模组进行对焦操作,耗费大量的时间成本。
41.本技术实施例公开一种快速对焦方法,包括:
42.摄像模组获取sfr图纸上至少三组对焦采样点;
43.建立最小化偏差平方和模型,对焦采样点分别带入至最小化偏差平方和模型,并对最小化偏差平方和模型的系数求偏导数,得到三组偏导系数值;
44.偏导系数值带入至最小化偏差平方和模型,得到最小化偏差平方和曲线;
45.获取最小化偏差平方和曲线的极值,得出对焦点位置结果。
46.具体地,dac值和对应dac值的sfr值之间的关系满足类抛物线曲线,即建立的最小化偏差平方和模型满足通过最小化误差的平方和寻找数据的最佳函数匹配。摄像模组只需获取三组以上的对焦采样点,根据对焦采样点的数据带入到最小化片场平方和模型中,再通过对最小化偏差平方和模型的系数求偏导数,得到的偏导系数值带入回最小化偏差平方和模型中,从而能够准确的获取到最小化偏差平方和曲线,从而能够直观、快速且精确的获取到dac值相对应的sfr值情况。再通过最小化偏差平方和曲线的极值获取到对焦点位置结果,从而完成摄像模组的对焦操作,减少获取的对焦采样点数量,减少逐步试错的时间,从而达到减少摄像模组的对焦时间,提高摄像模组的产能的效果。
47.最小化偏差平方和模型具体为:y=ax2+bx+c,使得最小化偏差平方和模型满足三元二次方程的关系。其中每组对焦采样点包括dac值和sfr值,dac值具体为vcm行程中其中一点的位置数值,sfr值具体为图像解析力算法值,并且sfr值随着dac值的改变而改变。
48.dac值作为最小化偏差平方和模型的x带入至模型内,sfr值作为最小化偏差平方和模型的y带入至模型内,a、b、c均为最小化偏差平方和模型的系数。具体地,摄像模组获取八组对焦采样点,并且分别带入到最小化偏差平方和模型内同时对a、b、c求偏导数。
49.dac值的最小对焦采样点和dac值的最大对焦采样点跨越sfr图纸的峰值点。由于sfr图纸的sfr值是通过dac值决定的,在获取多个对焦采样点带入到最小化偏差平方和模型时,是通过解最小化偏差平方和模型得到最小化偏差平方和曲线,从而根据最小化偏差平方和曲线判断对焦点的位置。即dac值的最小对焦采样点和dac值的最大对焦采样点需要跨越sfr图纸的峰值点,才能使最小化偏差平方和模型计算得出对焦点位置结果包含在最小化偏差平方和曲线内,从而能够精确的判断对焦点位置结果。
50.具体地,a、b、c求偏导数求解过程获得到三个矩阵方程:
51.a的偏导数矩阵方程:
52.b的偏导数矩阵方程:和
53.c的偏导数矩阵方程:
54.分别对a的偏导数矩阵方程、b的偏导数矩阵方程和c的偏导数矩阵方程求解,从而得到a、b、c的具体数值,即获得矩阵方程解得的三组偏导系数值,再将偏导系数值带入到最小化偏差平方和模型,从而获取最小化偏差平方和曲线,使得能够直观的观察到对焦点的位置。
55.具体地,一个对焦采样点如果偏离最小化偏差平方和曲线越远,证明对焦采样点噪音越大,这个点出现的概率就越小。
56.摄像模组与sfr图纸垂直设置,且摄像模组与sfr图纸相距预设定的距离值。设定固定的距离值,使得摄像模组通过和sfr图纸垂直相距的距离恒定,从而使获取对焦采样点的条件均一致,减少因获取参数不同而产生的对焦精度问题。
57.具体地,摄像模组和sfr图纸垂直设置,且摄像模组位于sfr图纸的中部一侧,从而使摄像模组能够捕捉到的画面均衡,从sfr图纸的中部进行捕捉,减少位置偏差对精度带来的影响。
58.进一步,距离值具体设定为20cm,摄像模组通过和sfr图纸垂直相距设定的20cm距离值,使摄像模组获取对焦采样点时,每次捕捉的画面相同,达到确保对焦精度的效果。
59.本技术实施例的原理为:摄像模组垂直位于sfr图纸的中心一侧,且相距sfr图纸20cm,从而获取sfr图纸的八个对焦采样点,获取的对焦采样点均带入至最小化偏差平方和模型,对最小化偏差平方和模型的系数求偏导值从而获得偏导系数值,从而获得最小化偏差平方和模型的最小化偏差平方和曲线。最小化偏差平方和曲线初步的判断得到对焦点的位置,再通过计算得出最小化偏差平方和曲线的极值,从而获取对焦点位置结果,过程中减少了对焦采样点的数目和对焦采样点试错的过程,从而达到减少摄像模组的对焦时间,提高摄像模组的产能的效果。
60.本技术提供一种摄像模组,摄像模组被设置为运行计算机程序以执行快速对焦算法。摄像模组通过外部的定位输送设备输送到设定的工位上,此时摄像模组垂直且距离20cm的朝向sfr图纸,从而捕捉固定位置上的sfr图纸画面,获取八组对焦采样点后带入至最小化偏差平方和模型,再通过进一步的计算处理得到最小化偏差平方和曲线的极值后,确定对焦点位置结果。
61.而其中摄像模组在捕捉sfr图像的过程中,易因为光照不足的情况,影响了对焦采样点的采集清晰度,使每组对焦采样点的采光环境不相同,影响对焦采样点的准确性。sfr图像照射有补强光,使得摄像模组能够清晰的获取对焦采样点,从而减小对焦采样点带入最小化偏差平方和模型的偏差。
62.本技术实施例的原理为:通过摄像模组获取对焦采样点,再通过补强光照射在sfr图纸,从而精准的获取对焦采样点的数值。
63.本技术提供一种计算机可读存储介质,计算机可读存储介质中存储有计算程序,其中,计算机程序被设置为运行时执行快速对焦算法。计算机可读存储介质用于对计算机程序进行存储,从而使需要快速对焦时,获取计算机程序进而实现快速对焦测试,减少摄像模组的对焦时间。
64.本技术实施例的原理为:计算机可读存储介质存储计算程序,摄像模组需要快速对焦时获取计算机程序,从而运行时执行快速对焦算法,实现快速找到对焦点位置。
65.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1