图形化设备网络拓扑组态方法、装置、设备及存储介质与流程
本发明涉及工业控制,尤其涉及一种图形化设备网络拓扑组态方法、装置、设备及计算机可读存储介质。
背景技术:
1、随着工业控制技术的飞速发展,工业生产的复杂度也在不断提升,同时随着工业设备的不断更新迭代,设备的计算能力越来越强,设备间的数据交换关系越来越复杂,一个工业控制系统中往往存在多个不同种类设备间的网络通信,会有ethernet/ip、ethercat、can等多种通讯协议同时存在的情况,设备间的网络拓扑关系也因此变得复杂多变,而进行工业生产的工业控制系统往往需要多种设备的高度协同和配合才能满足当前的生产要求。
2、目前国内的工业控制技术,基本是以单设备为中心的设计理念,每个设备在整个工业控制系统中都是一座孤岛,只能完成单个设备或单类设备的组态,不同设备之间难以协同和配合,如果要进行多设备网络组态,需要单独对每台设备进行相关操作,生产操作效率十分低下。同时在维护工厂设备以及产线时,也需要对每台设备分别进行故障诊断,大大影响生产操作效率。
3、因此,当下亟需一种以产线设计为场景、集多设备为一体,能够灵活地实现多设备网络组态的方法。
技术实现思路
1、本发明的主要目的在于提供一种图形化设备网络拓扑组态方法、装置、设备及计算机可读存储介质,旨在解决目前工业控制技术中的各设备组态不灵活导致生产操作效率低下的技术问题。
2、为实现上述目的,本发明提供一种图形化设备网络拓扑组态方法,所述图形化设备网络拓扑组态方法包括以下步骤:
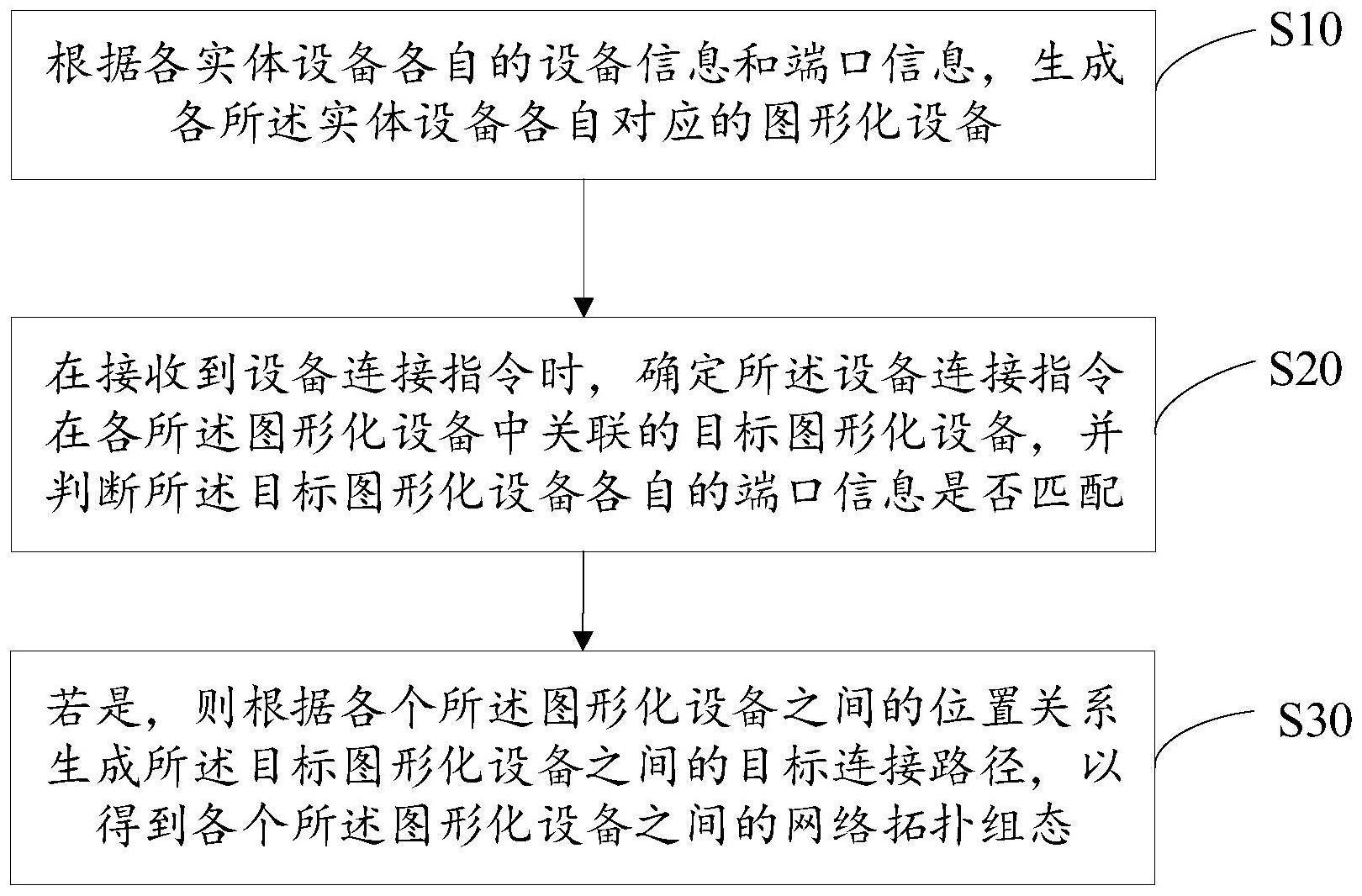
3、根据各实体设备各自的设备信息和端口信息,生成各所述实体设备各自对应的图形化设备;
4、在接收到设备连接指令时,确定所述设备连接指令在各所述图形化设备中关联的目标图形化设备,并判断所述目标图形化设备各自的端口信息是否匹配;
5、若所述目标图形化设备各自的端口信息匹配,则根据各个所述图形化设备之间的位置关系生成所述目标图形化设备之间的目标连接路径,以得到各个所述图形化设备之间的网络拓扑组态。
6、可选地,所述设备信息包括设备标识,所述端口信息包括端口类型;
7、所述生成各所述实体设备各自对应的图形化设备的步骤,包括:
8、根据所述设备标识生成各所述实体设备各自对应的设备图像;
9、根据所述端口类型生成各所述实体设备各自对应的端口图像;
10、将所述设备图像和所述端口图像共同作为各所述实体设备各自对应的图形化设备。
11、可选地,所述端口信息包括端口类型和通信协议;
12、所述判断所述目标图形化设备各自的端口信息是否匹配的步骤,包括:
13、判断所述目标图形化设备各自的端口类型之间是否一致;
14、若端口类型之间一致,则判断所述目标图形化设备各自的通信协议是否一致;
15、若通信协议一致,则判定所述目标图形化设备各自的端口信息匹配。
16、可选地,在所述确定所述设备连接指令在各所述图形化设备中关联的目标图形化设备的步骤之后,所述方法还包括:
17、判断所述连接指令对应的输入值是否符合预设的端口连接输入范围;
18、若所述输入值符合所述端口连接输入范围,则执行判断所述目标图形化设备各自的端口信息是否匹配的步骤。
19、可选地,在所述根据各个所述图形化设备之间的位置关系生成所述目标图形化设备之间的目标连接路径的步骤之前,所述方法还包括:
20、若所述目标图形化设备各自的端口信息匹配,判断所述连接指令对应的连接操作是否符合预设的连接关系表中的连接条件;
21、若所述连接操作符合所述连接条件,则执行根据各个所述图形化设备之间的位置关系生成所述目标图形化设备之间的目标连接路径的步骤。
22、可选地,所述根据各个所述图形化设备之间的位置关系生成所述目标图形化设备之间的目标连接路径的步骤,包括:
23、确定所述目标图形化设备各自的待连接端口坐标之间的全部连接路径;
24、根据各个所述图形化设备之间的位置关系,确定所述全部连接路径中的无障碍连接路径;
25、确定并生成所述无障碍连接路径中的最短连接路径,将所述最短连接路径作为目标连接路径。
26、可选地,在所述根据各个所述图形化设备之间的位置关系生成所述目标图形化设备之间的目标连接路径,以得到各个所述图形化设备之间的网络拓扑组态的步骤之后,所述方法还包括:
27、接收各个所述实体设备的运行状态数据和各个所述实体设备之间的通信状态数据;
28、将所述运行状态数据和所述通信状态数据映射至所述网络拓扑组态以基于所述网络拓扑组态确定各个所述实体设备的故障信息。
29、此外,为实现上述目的,本发明还提供一种图形化设备网络拓扑组态装置,所述图形化设备网络拓扑组态装置,包括:
30、设备创建模块,用于根据各实体设备各自的设备信息和端口信息,生成各所述实体设备各自对应的图形化设备;
31、端口匹配模块,用于在接收到设备连接指令时,确定所述设备连接指令在各所述图形化设备中关联的目标图形化设备,并判断所述目标图形化设备各自的端口信息是否匹配;
32、设备连接模块,用于若所述目标图形化设备各自的端口信息匹配,则根据各个所述图形化设备之间的位置关系生成所述目标图形化设备之间的目标连接路径,以得到各个所述图形化设备之间的网络拓扑组态。
33、此外,为实现上述目的,本发明还提供一种图形化设备网络拓扑组态设备,包括处理器、存储器、以及存储在所述存储器上的可被所述处理器执行的图形化设备网络拓扑组态程序,其中,所述图形化设备网络拓扑组态程序被所述处理器执行时,实现如上所述的图形化设备网络拓扑组态方法的步骤。
34、本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有图形化设备网络拓扑组态程序,其中,所述图形化设备网络拓扑组态程序被处理器执行时,实现如上所述的图形化设备网络拓扑组态方法的步骤。
35、本发明技术方案中的图形化设备网络拓扑组态方法,通过步骤:根据各实体设备各自的设备信息和端口信息,生成各所述实体设备各自对应的图形化设备;在接收到设备连接指令时,确定所述设备连接指令在各所述图形化设备中关联的目标图形化设备,并判断所述目标图形化设备各自的端口信息是否匹配;若所述目标图形化设备各自的端口信息匹配,则根据各个所述图形化设备之间的位置关系生成所述目标图形化设备之间的目标连接路径,以得到各个所述图形化设备之间的网络拓扑组态,本发明解决了目前工业控制技术中的各设备组态不灵活导致生产操作效率低下的技术问题。
36、本发明主要通过将同一工业控制系统中的各个实体设备映射为对应的图形化设备,便于用户通过各个图形化设备之间组成的视图对各个实体设备灵活进行统一管理以及各个实体设备之间的网络组态作出配置,使实体设备在视图中具有更高的操作自由度,图形化设备可以根据用户需求进行任意位置的拖放,进而使用户可以更容易的构建出结构清晰的设备网络环境,反映出真实清楚的实体设备之间的交互环境。又通过以自动匹配端口信息方式将任意两个图形化设备进行通信连接,在两个图形化设备之间的端口信息不匹配不允许通信连接的情况下能够避免那些不合法、设备之间无法正常通信的连接方式,避免用户对图形化设备之间的错误连接,减少用户不断反复试错的操作频率,提高操作效率。在两个图形化设备之间的端口信息匹配的情况下,根据各个图形化设备之间的相对位置关系,自动地为了任意两个图形化设备创建可行的连接路径,建立图形化设备间的网络连接关系,形成各个图形化设备间的网络拓扑组态,实现图形化设备之间的连接交互,使具有持续传输属性的图形化设备之间得以通信,使反映出的实体设备间的网络关系更加直观、组态过程更加高效,实体设备的故障诊断更易定位,很好的适应了工业自动化发展的需求。
37、此外,本技术通过上述将各个实体设备映射为图形化设备,并将各个图形化设备进行可行连接,大幅提升用户操作设备的自由灵活度和生产操作效率,建立统一的由各个图形化设备及其相互之间的连接关系的网络拓扑组态,用户可以根据需要对该网络拓扑组态进行网络总线及拓扑结构的配置,实现了设备间不同总线、不同网络拓扑关系的管理与视图展示,还可以基于在视图上对该网络拓扑组态的灵活操作,对实体设备作出合理配置,进一步提升生产操作效率。
- 还没有人留言评论。精彩留言会获得点赞!