一种轮式巡检机器人的制作方法
本申请涉及巡检机器人的,尤其是涉及一种轮式巡检机器人。
背景技术:
1、目前针对机房内的巡检主要是依靠人工,即工作人员定期到机房内进行巡视,但是这种方式效率低,且容易出错。尤其是对于环境条件较差的机房,工作人员的工作环境也较为艰苦。
2、相关技术中记载的自动巡检设备通常为挂轨式巡检机器人,即:将轨道安装在机房顶部,然后将安装有摄像头机器人悬挂在轨道上,机器人会按照轨道的路线进行往复运动,摄像头会将会对机房内的情况进行实时记录,并将记录视频传递至监控系统内。
3、但是挂轨式巡检机器人的巡检路径较为固定,当设备摆放的较为散落时,挂轨式巡检机器人不能灵活地适应巡检任务,巡检效果较差。
技术实现思路
1、为了使巡检机器人能够灵活地适应于不同的巡检任务,本申请提供一种轮式巡检机器人。
2、本申请提供的一种轮式巡检机器人采用如下的技术方案:
3、一种轮式巡检机器人,包括机体与安装在所述机体上的云台;
4、所述机体包括壳体、安装在所述壳体内的动力电机、由所述动力电机驱动的主动轮,以及安装在所述壳体上的从动轮,所述从动轮与所述主动轮配合。
5、通过采用上述技术方案,当机房内的设备摆放较为散落,且需要对设备进行巡检时,启动驱动电机,驱动电机带动主动轮行走,从动轮配合主动轮,带动机体与安装在机体上云台行走,云台将会随着机体的行走对散落摆放在各个位置处的设备进行巡检,且对设备能够进行更加全面的巡视,增强巡视效果。
6、可选的,所述云台包括摄像头与红外热成像仪。
7、通过采用上述技术方案,摄像头能够将设备的情况拍下,并将拍下的照片与视频传输至远程监控系统,方便工作人员实时查看设备的情况;红外热成像仪能够以“面”的形式对目标整体实时成像,使操作者通过屏幕显示的图像色彩和热点追踪显示功能就能初步判断发热情况和故障部位,然后加以后续分析,从而高效率、高准确率地确认问题所在,红外热成像仪能够辅助摄像头,增强巡检机器人的巡视效果,能够更加快速的发现问题。
8、可选的,在所述壳体的顶部安装有的3d激光雷达。
9、通过采用上述技术方案,由于轮式巡检机器人的行走路径较为复杂,在行走过程中,需要避让四周的障碍物,而3d激光雷达作用范围广泛,能够有效降低巡检机器人发生磕碰的可能性。
10、可选的,在所述壳体的四周依次间隔安装有多个防碰撞雷达。
11、通过采用上述技术方案,防碰撞雷达能够进一步有效降低巡检机器人人与障碍物发生碰撞的可能性,从而减少维护成本。
12、可选的,在所述壳体的下部安装有防跌落雷达。
13、通过采用上述技术方案,防跌落雷达能够对地面上障碍物与障碍坑进行检测与判断,经防跌落雷达判断后,若巡检机器人可以跨越该障碍物,巡检机器人就会继续行进,若巡检机器人不可以跨越该障碍物,巡检机器人便会停下或寻找其他路径。
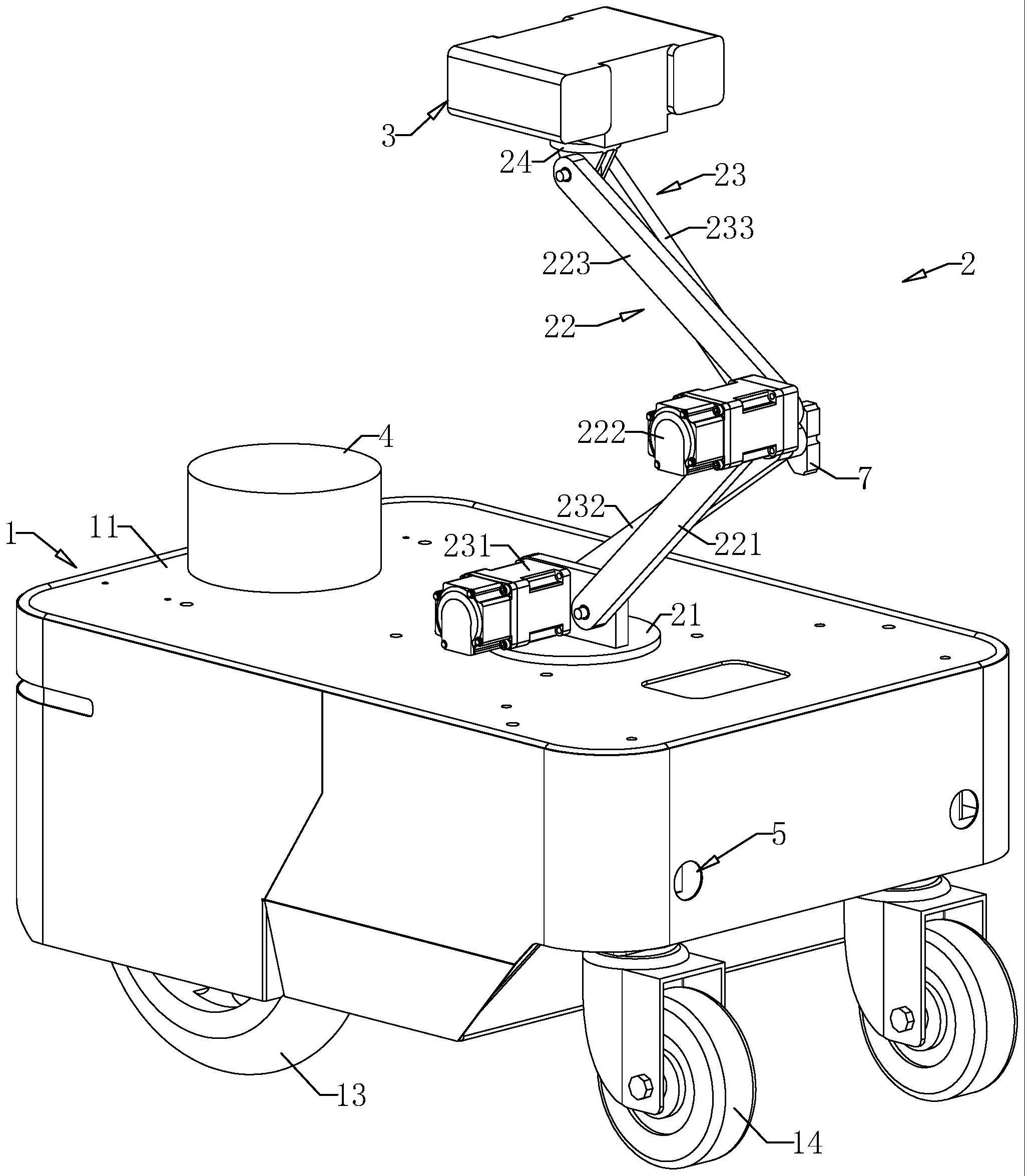
14、可选的,在所述壳体的顶部还安装有用于支撑所述云台的支撑机构;
15、所述支撑机构包括安装在所述壳体上的固定座、一端转动连接在所述固定座上的第一支撑组件,以及一端连接在所述固定座上的第二支撑组件,所述的第一支撑组件的另一端转动连接有固定台,所述第二支撑组件的另一端与转动连接在所述固定台上;
16、所述第一支撑组件包括一端转动连接在所述固定座上的第一支撑臂、固定安装在所述第一支撑臂远离所述固定座一端的第一支撑电机,以及与所述第一支撑电机输出轴固接的第一悬臂,所述第一悬臂的另一端与所述固定台转动连接;
17、所述第二支撑组件包括固定安装在所述固定座上的第二支撑电机、一端与所述第二支撑电机输出轴固接的第一支撑臂,以及与所述第一支撑臂远离所述固定座一端转动连接的第二悬臂,所述第二悬臂的另一端与所述固定台转动连接。
18、通过采用上述技术方案,当云台的高度位置需要进行变化时,同时启动第一支撑电机与第二支撑电机,第一支撑电机带动第一悬臂转动,第二支撑电机带动第二支撑臂转动,同时第一支撑臂与第二悬臂进行转动。由于第一支撑电机固定在第一支撑臂上,因此在第一支撑臂与第一悬臂的转动时,第一支撑臂与第一悬臂之间的角度不会发生变化,对固定台进行限制的,加上第二支撑组件对固定台的限制,在双重限制的作用下,固定台能够保持平稳,并进行平稳地升降。
19、可选的,在所述壳体内设置有旋转电机,所述旋转电机的输出轴与所述固定座固定连接,所述旋转电机可驱动所述固定座进行转动。
20、通过采用上述技术方案,可转动的固定座能够带动第一支撑组件与第二支撑组件进行转动,即可带动云台进行转动,从而扩大云台的巡检范围。
21、可选的,在所述支撑机构上还安装有气体传感器。
22、通过采用上述技术方案,气体传感器能够将气体的成分、浓度等信息传递至远端的监控系统,当设备出现损坏,产生异味,而摄像头无法感知时,气体传感器能够有效地传递信息,提醒工作人员及时地进行检修。
23、可选的,所述气体传感器安装于所述第二支撑臂与所述第二悬臂的转动连接位置处。
24、通过采用上述技术方案,能够对各个高度处的气体进行检测,检测范围更加广泛。
25、可选的,所述第一支撑臂、所述第一悬臂、所述第二支撑臂,以及所述第二悬臂长度一致。
26、通过采用上述技术方案,能够减少折叠后支撑机构的空间占用,便于巡检机器人通过一些狭窄空间。
27、综上所述,本申请包括以下至少一种有益技术效果:
28、1.通过设置可行走的机体与云台,云台将会随着机体的行走对散落摆放在各个位置处的设备进行巡检,且对设备能够进行更加全面的巡视,增强巡视效果;
29、2.通过设置所述云台包括摄像头与红外热成像仪,红外热成像仪能够辅助摄像头,增强巡检机器人的巡视效果,能够更加快速的发现问题;
30、3.通过设置在所述壳体的顶部安装有的3d激光雷达,由于轮式巡检机器人的行走路径较为复杂,在行走过程中,需要避让四周的障碍物,而3d激光雷达作用范围广泛,能够有效降低巡检机器人发生磕碰的可能性。
技术特征:
1.一种轮式巡检机器人,其特征在于:包括机体(1)与安装在所述机体(1)上的云台(3);
2.根据权利要求1所述的一种轮式巡检机器人,其特征在于:所述云台(3)包括摄像头(31)与红外热成像仪(32)。
3.根据权利要求1所述的一种轮式巡检机器人,其特征在于:在所述壳体(11)的顶部安装有的3d激光雷达(4)。
4.根据权利要求3所述的一种轮式巡检机器人,其特征在于:在所述壳体(11)的四周依次间隔安装有多个防碰撞雷达(5)。
5.根据权利要求4所述的一种轮式巡检机器人,其特征在于:在所述壳体(11)的下部安装有防跌落雷达(6)。
6.根据权利要求1所述的一种轮式巡检机器人,其特征在于:在所述壳体(11)的顶部还安装有用于支撑所述云台(3)的支撑机构(2);
7.根据权利要求6所述的一种轮式巡检机器人,其特征在于:在所述壳体(11)内设置有旋转电机(211),所述旋转电机(211)的输出轴与所述固定座(21)固定连接,所述旋转电机(211)可驱动所述固定座(21)进行转动。
8.根据权利要求6所述的一种轮式巡检机器人,其特征在于:在所述支撑机构(2)上还安装有气体传感器(7)。
9.根据权利要求8所述的一种轮式巡检机器人,其特征在于:所述气体传感器(7)安装于所述第二支撑臂(232)与所述第二悬臂(233)的转动连接位置处。
10.根据权利要求6所述的一种轮式巡检机器人,其特征在于:所述第一支撑臂(221)、所述第一悬臂(223)、所述第二支撑臂(232),以及所述第二悬臂(233)长度一致。
技术总结
本申请涉及巡检机器人的技术领域,公开了一种轮式巡检机器人,其包括机体与安装在所述机体上云台;所述机体包括壳体、安装在所述壳体内的动力电机、由所述动力电机驱动的主动轮,以及安装在所述壳体上的从动轮,所述从动轮与所述主动轮配合。本申请具有使巡检机器人能够灵活地适应于不同的巡检任务的效果。
技术研发人员:张晓勇,杜岩平,孙建,王兴越,马振华,袁丽,张金金,李艳鸣,周建,王凯,宋玉晨
受保护的技术使用者:北京潞电电气设备有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!