一种应用于地下位移三维测量装置的无线通讯方法
1.本发明属于地质灾害监测领域的一种通信控制方法,具体涉及一种地下位移测量装置的无线通讯方法。
背景技术:
2.我国是地质灾害发生最为频繁的国家之一,地质灾害种类繁多、分布广泛、活动频繁、危害严重。其中,滑坡是我国当前最需要重视的地质灾害,近年来,滑坡发生的次数占全部地质灾害总数的一半以上,严重威胁着人民的生命安全,给人民带来了极大的经济损失,同时对灾害易发地区的经济发展有着阻碍作用,对实现社会的可持续发展有着消极的影响。
3.为了实时监测岩土体的滑坡情况,并在滑坡即将来临前发出预警,本技术人曾提出了一种基于双互感等值电压的地下位移三维测量传感器,使用电源线和rs485总线将传感器串联形成传感阵列,通过测量出相邻两个传感器单元之间的相对位移来反映测量区域内岩土体从地表至地下深部位移的情况。但是由于使用了电源线和rs485总线共4根电线来串联传感器单元,在传感器焊接过程中难免出现漏焊、焊错等问题,在装置整体运输中容易出现电线断开造成系统整体故障等问题,在装置安装过程中需要大量人手等问题。因此,用4根电线来串联传感器单元的方式使得系统整体焊接、运输以及安装的难度较大。
技术实现要素:
4.基于上述背景,为解决使用rs485总线串联地下位移三维测量传感器带来的问题,本发明是提出了一种地下位移三维测量装置的无线通讯方法,解决系统有线通讯的问题。
5.为实现本发明的目的,拟采用以下技术方案:
6.本发明方案包括地下位移三维测量传感器中的传感器控制板,地面管理终端,以及地下位移三维测量传感阵列的无线通信方法。
7.方法采用的地下位移三维测量装置包含地下位移三维测量传感阵列与一个地面管理终端,所述的地下位移三维测量传感阵列是以地下位移三维测量传感器作为一个传感器单元、由多个地下位移三维测量传感器之间使用无线通讯的方式传输数据、使用一根电源总线串联形成,地面管理终端与地下位移三维测量传感阵列的仅一个传感器单元之间使用电源线和rs485通讯线连接。
8.所述的地下位移三维测量传感阵列中,各个传感器单元在地下沿深度方向间隔布置,地面管理终端与地下位移三维测量传感阵列中最靠近地面的第n号传感器单元之间连接。
9.所述的地下位移三维测量传感阵列布置在地下,且底端延伸到山体基岩,所述的地面管理终端布置在山体表面上,地面管理终端分别和用户电脑、物联网平台通信连接。
10.所述的地下位移三维测量传感器包含了铁芯线圈、传感器控制板、底板、空芯线圈和pvc套筒;pvc套筒内套装有空芯线圈,空芯线圈之内安装有铁芯线圈、传感器控制板和底
板,空芯线圈和铁芯线圈同轴布置,空芯线圈、铁芯线圈均和传感器控制板电连接,传感器控制板经两根电源线连接外部电源。
11.所述pvc套筒上下两端均灌胶密封。
12.所述空芯线圈、铁芯线圈用于激励自身所在地下位移三维测量传感器上方的地下位移三维测量传感器内部的空芯线圈,使其产生正弦信号;
13.所述传感器控制板303用于输出正弦激励信号,读取由自身所在地下位移三维测量传感器的空芯线圈305产生的正弦信号,读取出姿态数据,与上方或下方的地下位移三维测量传感器通过无线通讯进行数据交换;
14.所述底板304用于固定磁芯线圈以及传感器控制板在空芯线圈内部的位置。
15.所述的传感器控制板包含微处理器、信号选择模块、信号处理模块、姿态测量模块、无线通讯模块、电源模块以及线圈;线圈分为空芯线圈、铁芯线圈,空芯线圈、铁芯线圈经信号选择模块和信号处理模块连接,微处理器分别和信号处理模块、姿态测量模块、无线通讯模块、电源模块连接;所述微控制器控制信号选择模块连接到空芯线圈还是铁芯线圈,控制信号选择模块选择是发出激励信号还是接收激励信号。
16.所述微控制器采用单片机,通过片内adc对信号处理模块返回的信号进行采样并处理,读取姿态测量模块采集的自身单元的姿态数据,使用串口经由无线通讯模块与上方或下方的传感器单元进行数据交换,控制电源模块工作,以及产生正弦信号,将正弦波的波形幅值表存储在片内rom内,通过单片机设置内部dma通道,将正弦波的单周期脉冲输出至片内dac,通过设置调出正弦波的速度设置正弦波频率,输出稳定的正弦波通过自身单元的空芯线圈或磁芯线圈以激励上方传感器内的空芯线圈。
17.所述信号选择模块包含一个模拟开关及其外围电路,用于对单片机dac产生的正弦信号输出给空芯线圈或者将空芯线圈受激励产生的正弦信号输出给信号处理模块;
18.所述信号处理模块包含一个仪表放大器和一个有效值转换器及其外围电路;所述仪表放大器用于对空芯线圈的输出电压进行差分放大,再输入到有效值转换器中进行处理;所述有效值转换器用于对仪表放大器输出的信号进行转换,再输入给单片机进行adc采样处理;
19.所述姿态测量模块用于采集自身所在的地下位移三维测量传感器的姿态数据并通过串口传输给单片机;
20.所述无线通讯模块用于唤醒自身所在地下位移三维测量传感器的传感器控制板中的单片机,与单片机通过串口进行数据交换,并与上方或下方地下位移三维测量传感器组成主机或从机,只有配置为一主机一从机的模式,两个无线通讯模块才能进行数据交换以及信号传输。
21.所述电源模块用于产生供单片机、姿态测量模块以及无线通讯模块工作的3.3v电压,以及产生由单片机控制的供信号选择模块以及信号处理模块工作的
±
5v电压。
22.相邻传感器单元之间通过各自的无线通信模块通过发出指令而建立通信连接;在相邻传感器单元之间建立通信后,按照以下进行交互控制:
23.当一个传感器单元的微控制器控制自身所连接的信号选择模块发出正弦的激励信号到空芯线圈/铁芯线圈产生正弦信号,另一传感器单元的铁芯线圈接收到正弦信号进而经自身所连接的信号选择模块发送到信号处理模块,信号处理模块识别正弦信号获得互
感电压并发送到信号处理模块中储存;同时,传感器单元的微控制器控制自身的姿态测量模块测量获得姿态数据后,并保存于微控制器中。
24.所述的地下位移三维测量传感阵列中的各个传感器单元的序号按照从最底部到最靠近地面的顺序依次从1到n进行自然数设置,其中仅位于最底部的1号传感器单元内预先设定有被唤醒后的固定待机时间;
25.所述的地下位移三维测量传感阵列中的各个传感器单元第一次上电后均配置为与自身上方相邻的传感器单元进行无线通讯,然后每次进行地下位移三维测量按照以下方式进行;
26.第一阶段流程:
27.初始情况下,每个传感器单元都处于断开状态和待机状态,地面管理终端发出的工作指令进行第一阶段流程,给n号传感器单元,使n号传感器单元被唤醒进入工作状态,然后按照以下方式从上至下不断在相邻两个传感器单元之间通信处理而依次唤醒过各个传感器单元,使得唤醒过后每个传感器单元都配置为自身下方相邻的传感器单元的从机:
28.i+1号传感器单元配置为i号传感器单元的主机,发送唤醒指令到i号传感器单元来唤醒i号传感器单元进行工作,i号传感器单元接收到唤醒指令后被唤醒并返回苏醒指令到i+1号传感器单元,使得i+1号传感器单元与i号传感器单元无线连接成功,i+1号传感器单元在接收到苏醒指令后配置为i号传感器单元的从机并进入待机状态;
29.直到1号传感器单元被唤醒过后经预先设定的固定苏醒时间进入待机状态;
30.第二阶段流程:
31.1号传感器单元再经预先设定的固定待机时间后被自动定时唤醒进入工作状态,此时每个传感器单元的无线连接都处于断开状态,进入下一阶段流程,然后按照以下方式从下至上不断在相邻两个传感器单元之间通信处理而依次唤醒各个传感器单元进行数据测量、数据传输工作。
32.所述第二阶段流程中,相邻两个传感器单元之间通信处理,具体如下:
33.s1、i号传感器单元配置为i+1号传感器单元的主机,i号传感器单元循环发送唤醒指令到i+1号传感器单元来唤醒i+1号传感器单元进行工作,i+1号传感器单元接收到唤醒指令后被唤醒,然后返回苏醒指令到i号传感器单元;
34.s2、i号传感器单元接收到i+1号传感器单元返回的苏醒指令后准备激励信号的工作和循环发送第零指令f0到i+1号传感器单元,所述准备激励信号包括微处理器控制信号选择模块切换连通到空芯线圈并产生频率恒定的正弦波信号传输给空芯线圈;i+1号传感器单元在接收到第零指令f0后准备信号处理的工作和返回第零指令f0到i号传感器单元,所述准备信号处理包括微处理器控制信号选择模块切换连通到空芯线圈且空芯线圈连接到信号处理模块;
35.s3、i号传感器单元接收到i+1号传感器单元返回的第零指令f0后,循环发送第一指令f1到i+1号传感器单元,i+1号传感器单元接收到第一指令f1完成第一次信号采集工作,然后返回第一指令f1到i号传感器单元,
36.s4、i号传感器单元接收到i+1号传感器单元返回的第一指令f1后更新激励信号的工作和循环发送第二指令f2到i+1号传感器单元,所述更新激励信号包括微处理器控制信号选择模块切换连通到磁芯线圈、产生相同的正弦波信号传输给磁芯线圈,i+1号传感器单
元接收到第二指令f2完成第二次信号采集工作,然后返回第二指令f2到i号传感器单元;
37.所述第一次信号采集和第二次信号采集均包括微处理器接通信号处理模块、对信号处理模块发过来的信号处理获得互感电压数据并保存、后关闭接通信号处理模块;
38.s5、i号传感器单元接收到i+1号传感器单元返回的第二指令f2后关闭激励信号的工作和循环发送第三指令f3到i+1号传感器单元,所述关闭激励信号包括微处理器停止输出正弦波信号给磁芯线圈,i+1号传感器单元接收到第三指令f3完成第三次信号采集工作,所述第三次信号采集包括开启姿态测量模块、由姿态测量模块完成读取姿态数据并存储到微处理器的工作后关闭姿态测量模块,i+1号传感器单元将三次信号采集工作获得的数据组成地下三维数据,然后返回第三指令f3到i号传感器单元;
39.s6、i号传感器单元接收到i+1号传感器单元返回的第三指令f3后,从自身微处理器存储的数据中依次提取从1号传感器单元到自身i号传感器单元的地下三维数据整合到第四指令f4中并依次发送,i+1号传感器单元接收到第四指令f4保存数据后返回第四指令f4到i号传感器单元,直到i号传感器单元在接收到i+1号传感器单元返回的涵盖从1号传感器单元到自身i号传感器单元的地下三维数据的全部第四指令f4后,发送第五指令f5到i+1号传感器单元,i+1号传感器单元接收到第五指令f5后返回工作结束指令,并更新配置为i+2号传感器单元的主机,同时i号传感器单元接收到i+1号传感器单元返回的工作结束指令更新配置为i+1号传感器单元的从机并进入待机状态。
40.s7、不断重复步骤s1~s6从下至上完成数据测量和数据传输,直到n号传感器单元接收到n-1号传感器单元发过来的第五指令f5后返回工作结束指令后,n号传感器单元更新配置为地面管理终端的从机并将数据通过rs485总线传输给地面管理终端,数据传输完成后n号传感器单元进入待机状态。
41.所述s6具体为:
42.s61、i号传感器单元接收到i+1号传感器单元返回的第三指令f3;
43.s62、i号传感器单元将x号传感器单元的地下三维数据整合到第四指令f4中形成第四指令f4x而发送给i+1号传感器单元,i+1号传感器单元接收到第四指令f4x保存数据后返回第四指令f4x到i号传感器单元,i号传感器单元在接收到i+1号传感器单元返回的第四指令f4x后;
44.s63、以x从1到i的顺序,不断重复上述步骤s62,直到i号传感器单元在接收到i+1号传感器单元返回的第四指令f4i后,发送第五指令f5到i+1号传感器单元;
45.s64、i+1号传感器单元接收到第五指令f5后返回工作结束指令,并更新配置为i+2号传感器单元的主机,同时i号传感器单元接收到i+1号传感器单元返回的工作结束指令更新配置为i+1号传感器单元的从机并进入待机状态。
46.上述唤醒指令、f0指令~f5指令都是在相邻传感器单元的无线通信模块之间通信传输。
47.这样本发明中,所述的地下位移三维测量传感阵列中的传感器单元具有从机待机、上方从机、下方主机、下方从机、上方主机五种工作状态,空闲时传感器单元处于从机待机状态;在地面管理终端发出工作指令后,传感器单元的工作状态依次从上方从机、下方主机、从机待机、下方从机、上方主机、从机待机改变。根据工作状态的变换,使得传感器单元之间自动完成测量工作。
48.本发明的有益效果是:
49.本发明的地下位移三维测量传感阵列的初始设计采用有线方式,即4根电线串联的方式,而这种方式使得系统整体焊接、运输以及安装的难度较大。
50.在地下位移三维测量传感阵列中使用无线通讯的方法,本发明可以有效解决系统使用有线通讯带来的问题,使得本系统可以适用于各种复杂的野外工作环境。
附图说明
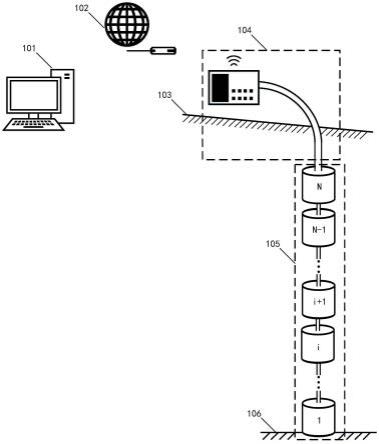
51.图1为本发明的地下位移三维测量系统整体工作流程示意图。
52.图2为本发明的地面管理终端结构示意图。
53.图3为本发明的地下位移三维测量传感器结构示意图。
54.图4为本发明的地下位移三维测量传感器工作模块示意图。
55.图5为本发明的地下位移三维测量传感阵列空闲工作状态示意图。
56.图6为本发明的地下位移三维测量传感阵列从上至下工作状态示意图。
57.图7为本发明的地下位移三维测量传感阵列从下至上工作状态示意图。
58.表1为本发明的无线通信功能码设定。
59.其中:101—用户电脑,102—物联网平台,103—山体表面,104—地面管理终端,105—地下位移三维测量传感阵列,106—山体基岩;
60.202—两根电源线与两根rs485通讯线;
61.301—铁芯线圈,302—两根电源线,303—传感器控制板,304—底板,305—空芯线圈,306—pvc套筒。
具体实施方式
62.下面结合附图1-图6对本发明进一步详细说明。
63.本发明实施公开地下位移三维测量装置的无线通讯方法,如图1、图2、图3、图4、图5、图6所示,包括系统整体工作流程、地面管理终端结构、地下位移三维测量传感器结构、传感器上电开机工作流程、传感器从上至下唤醒工作流程、传感器从下至上唤醒工作流程。
64.如图1所示,方法采用的地下位移三维测量装置包含地下位移三维测量传感阵列105与一个地面管理终端104,地下位移三维测量传感阵列105是以地下位移三维测量传感器作为一个传感器单元、由多个地下位移三维测量传感器之间使用无线通讯的方式传输数据、使用一根电源总线串联形成,地面管理终端104与地下位移三维测量传感阵列的仅一个传感器单元之间使用电源线和rs485通讯线202连接。
65.参照图2,地下位移三维测量传感阵列105中,各个传感器单元在地下沿深度方向间隔布置,地面管理终端104与地下位移三维测量传感阵列中最靠近地面的第n号传感器单元之间连接。
66.地面管理终端104主要用于接收、保存与显示地下位移三维数据、处理用户的远程指令以及唤醒地下位移三维测量传感阵列105进行工作。
67.地下位移三维测量传感阵列105布置在地下,且底端延伸到山体基岩106,地面管理终端104布置在山体表面103上,地面管理终端104分别和用户电脑101、物联网平台102通信连接。
68.其中,地面管理终端104置于山体表面103,通过钻孔至山体基岩106位置,将地下位移三维测量传感器阵列105埋入山体内,使得1号传感器置于在山体基岩106上。地面管理终端104控制地下位移三维测量传感阵列105进行工作,获取地下位移三维数据信息。用户可使用自己的电脑101通过物联网平台102查看地面管理终端104传输的地下位移三维数据,并可以通过物联网平台102控制地面管理终端104的工作,实现远程监测地下位移三维信息。
69.如图3所示,地下位移三维测量传感器包含了铁芯线圈301、传感器控制板303、底板304、空芯线圈305和pvc套筒306;pvc套筒306内套装有空芯线圈305,空芯线圈305之内安装有铁芯线圈301、传感器控制板303和底板304,空芯线圈305和铁芯线圈301同轴布置,空芯线圈305、铁芯线圈301均和传感器控制板303电连接,传感器控制板303经两根电源线302连接地面上的外部电源。
70.具体实施中,铁芯线圈301与传感器控制板303安装在底板304上,底板304固定在空芯线圈305内部使得铁芯线圈301、空芯线圈305同心,空芯线圈305放置在pvc套筒306内部并灌入密封胶,使用两根电源线302将每个传感器单元串联起来,组成地下位移三维测量传感阵列,保证每个传感器的供电需要。
71.如图4所示,传感器控制板303包含微处理器、信号选择模块、信号处理模块、姿态测量模块、无线通讯模块、电源模块以及线圈;线圈分为空芯线圈305、铁芯线圈301,空芯线圈305、铁芯线圈301经信号选择模块和信号处理模块连接,微处理器分别和信号处理模块、姿态测量模块、无线通讯模块、电源模块连接;微控制器控制信号选择模块连接到空芯线圈305还是铁芯线圈301,控制信号选择模块选择是发出激励信号还是接收激励信号。
72.参照图4地下位移三维测量传感阵列105工作模块示意图,传感器单元共分为7个工作模块,由微处理器控制各模块进行工作,并通过无线通信模块的数据传输来实现对上方传感器单元或下方传感器单元的状态控制。
73.相邻传感器单元之间通过各自的无线通信模块通过发出指令而建立通信连接进而用于实现交互控制;例如,作为主机的传感器单元从自身的无线通信模块发出寻找从机信号的唤醒信号,作为从机的传感器单元的无线通信模块接收到唤醒信号而使得作为从机的传感器单元被唤醒。以及例如,作为主机的传感器单元从自身的无线通信模块发出固定的指令到作为从机的传感器单元,作为从机的传感器单元从自身的无线通信模块接收到指令并执行指令工作。
74.在相邻传感器单元之间建立通信后,按照以下进行交互控制:
75.当一个传感器单元的微控制器控制自身所连接的信号选择模块发出正弦的激励信号到空芯线圈305/铁芯线圈301产生正弦信号,另一传感器单元的仅铁芯线圈301接收到正弦信号进而经自身所连接的信号选择模块发送到自身所连接的信号处理模块,信号处理模块识别正弦信号获得互感电压并发送到自身所连接的信号处理模块中储存;
76.当一个传感器单元的空芯线圈305和铁芯线圈301分别依次产生正弦信号,另一传感器单元的仅铁芯线圈301接收两次不同的正弦信号,进而获得两种不同的互感电压。
77.同时,传感器单元的微控制器控制自身的姿态测量模块测量获得姿态数据后,并保存于微控制器中。
78.最终一个传感器单元的微控制器内储存的两种不同的互感电压和姿态数据通过
通信控制和交互控制后共同发送到另一个传感器单元的微控制器中,并依次在各个传感器单元间传递,最终发送到地面管理终端104。
79.所述的地下位移三维测量传感阵列105中的各个传感器单元的序号按照从最底部到最靠近地面的顺序依次从1到n进行自然数设置,其中地面管理终端104和最靠近的n号传感器单元之间通过rs485总线连接,仅位于最底部的1号传感器单元内预先设定有被唤醒后的固定待机时间,即1号传感器单元被唤醒后将在固定待机时间之后自动苏醒。
80.参照图5地下位移三维测量传感阵列上电开机工作流程图,传感器单元第一次上电后,本传感器单元配置为与自身上方相邻的传感器单元进行无线通讯,每个传感器单元的无线连接都处于断开状态,然后地下位移三维测量传感阵列105)进入待机模式,等待地面管理终端104发出的工作指令进行第一阶段流程。
81.参照图6地下位移三维测量传感阵列从上至下唤醒工作流程图,地面管理终端104发出工作指令给n号传感器单元,使n号传感器单元被唤醒进入正常工作模式,此时n号传感器单元配置为n-1号传感器单元的主机,发送唤醒指令到n-1号传感器单元来唤醒n-1号传感器单元进行工作,n-1号传感器单元接收到唤醒指令后返回苏醒指令到n号传感器单元,使得n号传感器单元与n-1号传感器单元无线连接成功,n号传感器单元在接收到苏醒指令后配置为n-1号传感器单元的从机并进入待机状态,n-1号传感器单元将自身配置为n-2号传感器单元的主机。
82.依次类推,i+1号传感器单元配置更新为i号传感器单元的主机,唤醒i号传感器单元后,i+1号传感器单元配置更新为i号传感器单元的从机,并进入待机状态,i号传感器单元配置更新为i-1号传感器单元的主机。这样从上至下依次唤醒一遍传感器串,每个传感器单元都配置过为自身下方相邻的传感器单元的主机和从机。
83.当1号传感器单元完成此次工作流程后,进入固定待机时间后将定时唤醒的待机状态,此时每个传感器单元的无线连接都处于断开状态,传感阵列进入下一阶段流程。
84.经过图6的工作流程,1号传感器单元被预设的固定待机时间定时唤醒后配置更新为与2号传感器单元的主机,地下位移三维测量传感阵列(105)即开始从下至上的唤醒和数据测量、传输工作,任取i号传感器单元与i+1号传感器单元,如图7所示,其工作过程如下:
85.1、i号传感器单元作为i+1号传感器单元的主机与i+1号传感器单元作为i号传感器单元的从机无线连接成功后,i+1号传感器单元被唤醒,i号传感器单元循环发送唤醒指令,i+1号传感器单元接收到后返回苏醒指令到i号传感器单元。
86.2、i号传感器单元接收到i+1号传感器单元返回的苏醒指令后准备激励信号的工作(包括i号传感器单元的微处理器控制电源模块产生
±
5v电压供信号选择模块工作,控制信号选择模块切换连通到空芯线圈,即信号选择模块接空芯线圈的一端,空芯线圈的另一端接地;微处理器产生一个频率恒定的正弦波信号,将正弦波信号传输给空芯线圈),循环发送第零指令f0到i+1号传感器单元,i+1号传感器单元接收到第零指令f0后准备信号处理的工作(包括i+1号传感器单元的微处理器控制电源模块产生
±
5v电压供信号选择模块工作,控制信号选择模块切换连通到空芯线圈,将空芯线圈的两端组成差分信号的形式传输给信号处理模块),然后返回第零指令f0到i号传感器单元。
87.3、i号传感器单元接收到i+1号传感器单元返回的第零指令f0后,循环发送第一指令f1到i+1号传感器单元,i+1号传感器单元接收到第一指令f1完成第一次信号采集工作
(包括微处理器接通信号处理模块,通过自身内部的模数转换器adc对信号处理模块发过来的信号进行采样、处理获得互感电压数据并保存数据,后关闭接通信号处理模块),然后返回第一指令f1到i号传感器单元。
88.4、i号传感器单元接收到i+1号传感器单元返回的第一指令f1后更新激励信号的工作(包括微处理器控制信号选择模块切换连通到磁芯线圈,即信号选择模块接磁芯线圈的一端,磁芯线圈的另一端接地;微处理器停止输出正弦波信号给空芯线圈,产生一个之前相同的正弦波信号,将正弦波信号传输给磁芯线圈),循环发送第二指令f2到i+1号传感器单元,i+1号传感器单元接收到第二指令f2完成第二次信号采集工作(包括微处理器接通信号处理模块,通过自身内部的模数转换器adc对信号处理模块发过来的信号进行采样、处理获得互感电压数据并保存数据,后关闭接通信号处理模块),然后返回第二指令f2到i号传感器单元。
89.5、i号传感器单元接收到i+1号传感器单元返回的第二指令f2后关闭激励信号的工作(包括微处理器停止输出正弦波信号给磁芯线圈),循环发送第三指令f3到i+1号传感器单元,i+1号传感器单元接收到第三指令f3完成第三次信号采集工作(包括开启自身内部的姿态测量模块,由姿态测量模块完成读取姿态数据并存储到微处理器的工作后关闭姿态测量模块),然后返回第三指令f3到i号传感器单元。
90.此时,i+1号传感器单元将三次信号采集工作获得的数据组成地下三维数据,即将前两次的互感电压和第三次的姿态数据共同组成地下三维数据。
91.6、i号传感器单元接收到i+1号传感器单元返回的第三指令f3后,从自身微处理器存储的数据中依次提取从1号传感器单元到自身i号传感器单元的地下三维数据整合到第四指令f4中并依次发送,i+1号传感器单元接收到第四指令f4保存数据后返回第四指令f4到i号传感器单元。
92.具体地,以x从1到i的顺序,i号传感器单元将x号传感器单元的地下三维数据整合到第四指令f4中形成第四指令f4x而发送给i+1号传感器单元,i+1号传感器单元接收到第四指令f4x保存数据后返回第四指令f4x,表示x号传感器单元的地下三维数据接收完毕。
93.当x=i时,表示i+1号传感器单元完成对i号传感器单元所采集的地下三维数据的接收,返回第四指令f4i,此时表明i+1号传感器单元内部保存了从1号传感器单元到i号传感器单元的所有地下三维数据。
94.7、i号传感器单元在接收到i+1号传感器单元返回的全部第四指令f4后,发送第五指令f5到i+1号传感器单元,i+1号传感器单元接收到第五指令f5后返回工作结束指令,并更新配置为i+2号传感器单元的主机,同时i号传感器单元接收到i+1号传感器单元返回的工作结束指令更新配置为i+1号传感器单元的从机并进入待机状态。
95.具体地,i号传感器单元在接收到i+1号传感器单元返回的第四指令f4i后,发送第五指令f5到i+1号传感器单元,i+1号传感器单元接收到第五指令f5后返回工作结束指令,并更新配置为i+2号传感器单元的主机,同时i号传感器单元接收到i+1号传感器单元返回的工作结束指令更新配置为i+1号传感器单元的从机并进入待机状态。
96.依次类推,传感阵列从下至上完成一次测量以及数据传输,直到n号传感器单元接收到n-1号传感器单元发过来的第五指令f5后返回工作结束指令后,则n号传感器单元工作结束,更新配置为地面管理终端(104)的从机,并将数据通过rs485总线返回给地面管理终
端(104),数据传输完成后n号传感器单元进入待机状态,地面管理终端(104)对数据进行保存、显示以及传输至物联网平台供用户远程查看。
97.本发明上述过程中的主从机的配置能建立传感器单元间在下一次通信的固定通信关系,而无法被其他传感器单元干扰、受影响。如i号传感器单元配置为i+1号传感器单元的从机能使得i号传感器单元仅和i+1号传感器单元通信,仅能被i+1号传感器单元唤醒,这样能够确保传感器之间是按顺序进行通信,带来当单个传感器无法正常工作时其上下方的传感器能重新组网通信的特点,实现单个传感器出现故障时其余传感器仍能正常工作的效果优势。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1