无人机辅助的超大规模机器类场景下绿色立体覆盖方法
1.本发明属于无人机空地通信资源分配技术领域,涉及一种无人机辅助的超大规模机器类场景下绿色立体覆盖方法,具体是指在用户立体分布的小区中,采用无人机辅助与非正交多址接入实现广域覆盖与大规模连接,并通过无人机与地面基站的资源分配实现绿色覆盖。
背景技术:
2.超大规模机器类通信是5g的经典场景之一,侧重于人与物之间的信息交换,着眼于万物互联。它需要网络承载更多的设备连接,要求低延时、高可靠的广域覆盖,并且需要实现低成本和低功耗。
3.随着无人机技术的普及,无人机也逐渐应用到通信领域。无人机基站易于部署、设置成本低,可以有效地应对需求灵活的问题。与传统的地面基站相比,使用无人机作为飞行基站的优势在于它们能够调整高度,避开障碍物,并增加与地面用户建立视线(los)通信链路的可能性,减少阴影和阻塞效应,提供高质量的信道。因此,无人机作为空中基站可以有效利用移动灵活、良好的视线连接的优点,提高覆盖的范围,实现无线通信广域覆盖。然而,由于无人机机载能量是有限的,无人机基站的能量主要用于信号处理发送以及飞行推进,因此,如何合理地规划飞行轨迹,提高无人机基站的能量效率,延长无人机的续航能力,是一个需要解决的问题。
4.为了解决频谱资源稀缺的问题,实现多个用户频谱共享,日本do co mo公司提出了非正交多址接入技术(noma),在发送端采用叠加编码技术,将不同用户的信息在同一资源块中传输,在接收端采用串行干扰消除(sic)技术对不同用户的信号进行解码。在noma方案中,每个时频资源块中承载着非正交的多个用户的信号,相比于传统的正交多址接入方案,noma可以实现多个用户频谱共享,提升频谱效率,有效地提高设备接入量。将无人机与noma结合可以在实现广域覆盖的同时实现大规模用户接入,有效应对万物互联的需求。
5.为了解决接入规模、成本消耗等问题,可以采用无人机基站基于noma辅助地面基站对小区边缘的设备进行服务,从而实现高密度广域覆盖。然而在目前,基于noma的无人机大规模连接空地通信网络中,无人机的能量供应仍然是一个瓶颈问题。为了寻求无人机传输速率与能量消耗之间的平衡,延长无人机的续航时间,本发明通过优化无人机基站的飞行轨迹与发射功率提升无人机的能量效率,并且在达到相同平均吞吐量的情况下,通过优化地面基站功率分配最小化基站发射功率,以降低通信系统的能耗。
技术实现要素:
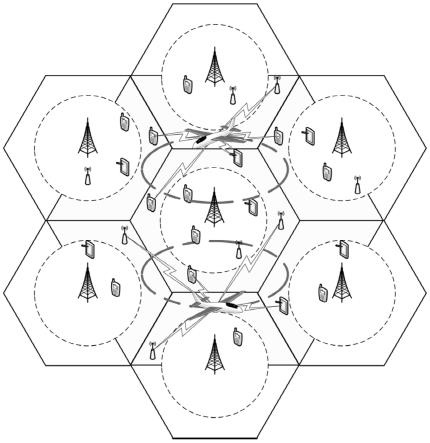
6.本发明提供了一种无人机辅助的超大规模机器类场景下绿色立体覆盖方法。用户立体分布的小区中,小区中心用户采用地面基站进行服务,小区边缘用户采用无人机基站进行服务来服务以扩大覆盖面积,基站都采用noma服务用户以增加连接用户数量,具体方案如图1。基于此模型,本发明提供了一种联合优化无人机飞行轨迹和功率分配的方案,致
力于提升无人机的能量效率来突破无人机的能耗瓶颈,另外在达到相同平均吞吐量的情况下,通过功率分配优化降低了基站的发射功耗,实现节能目的。
7.本发明解决技术问题采用的技术方案如下:
8.一种无人机辅助的超大规模机器类场景下绿色立体覆盖方法,包括以下步骤:
9.第一步,构建系统模型:
10.1.1)此场景为了实现致密覆盖连接且避免部署超高密度地面基站,采用无人机基站服务小区边缘用户。可以将等效的四个地面基站与两个无人机基站覆盖的六边形区域看作一个整体,等效于覆盖四个小区。假设无人机基站、地面基站与用户都是单天线的,并且地面基站与用户都是静止的。由于无人机的灵活性以及良好的信道,采用无人机基站服务小区边缘用户,基站服务小区中心用户。无人机基站与地面基站都采用noma,为了保证sic的效果,每个noma对由两个用户组成,共享同一个资源块,带宽为b,不同的noma对分配不同频率的资源块。假设无人机基站和地面基站的集合分别为u∈{1,2}和w∈{1,2,3,4},他们服务的noma对的集合表示为即无人机基站和地面基站都占用i个资源块服务相同数量的2i个用户,每个宏单元的半径为r。为了保证无人机基站与地面基站服务数量相同的用户,地面基站的服务范围
11.由于连续的时间变量难以处理,将其转化为离散模型。将无人机的飞行时间t离散化为n个以δ
t
=t/n为步长的时隙,时刻的集合可以表示为n∈{0,1,..,n}。简便起见,假设无人机基站在固定高度h飞行,第u个无人机基站的二维坐标可以定义为另外,第w个地面基站的位置为lw=[xw,yw,zw],用户的坐标为其中l∈{u,g}表示用户是无人机基站服务还是地面基站服务,m表示基站的编号,j∈{1,2}表示noma对中的用户,表示的二维位置。
[0012]
1.2)在系统模型中表示一个维度为n
×
m的矩阵;||a||表示向量a的二范数;表示服从均值为μ方差为σ2的复高斯分布。
[0013]
第u个无人机基站到用户的信道是los信道,第n个时刻的信道可以表示成:
[0014][0015]
其中γu是1m处的信道增益。第w个地面基站到用户的信道服从瑞利衰落,可以表示为
[0016][0017]
其中γg是1m处的信道增益,α表示信道损耗指数。
[0018]
noma对之间的干扰通过采用不同的资源块消除,在一个时隙内,接收到来自第u个无人机基站的信号为:
[0019]
[0020]
其中,是在第n个时隙第u个无人机基站给的功率分配,表示单位功率发射信号,表示加性高斯白噪声。
[0021]
接收到第w个地面基站的信号可以表示为:
[0022][0023]
其中p
gt
是地面基站最大发射功率,是消息的功率分配系数。
[0024]
由于无人机通信的能量供应是一个主要的瓶颈问题,首先对无人机的能量效率进行优化,然后在达到相同吞吐量的情况下最小化地面基站的发射功率,进而减少整体的能量消耗。
[0025]
第二步,根据第一步构建无人机基站能效优化模型,确定目标函数,列出优化问题:
[0026]
在不失一般性的情况下,我们假设noma对中的第一个用户,即被分配了更多的发射功率,并且其消息首先被解码。根据(3)的接收信号和noma的解码特征,在解码时将其他的信号视作干扰,第n个时刻可达速率可以表示为:
[0027][0028]
应当满足条件和其中p
ut
时无人机发射功率限制。为了保证可以在noma对中两个用户处都被解码,可达速率需要满足:
[0029][0030]
解码时,首先通过sic消除已解码信号,的解码速率可以表示为:
[0031][0032]
另外,由于固定翼无人机飞行时间更长,采用固定翼无人机作为空中基站服务用户。由于无人机在空中周期飞行,它的推进功率上限可以表示成:
[0033][0034]
其中和表示第u个无人机在第n个时刻的二维速度与加速度,c1和c2是与无人机本身相关的参数,g表示重力加速度。
[0035]
根据(6),(7)和(8),无人机飞行周期内的能量效率可以表示为:
[0036][0037]
其中p
uc
是电路消耗固定功率。
[0038]
为了在无人机实际运动模型与用户服务质量的限制下最大化能量效率,将无人机飞行轨迹qu、速度vu、加速度au和功率分配pu进行联合优化,得到的优化问题(10)可以描述为:
[0039][0040][0041][0042][0043][0044][0045][0046][0047]vmin
≤||vu[n]||≤v
max
,
ꢀꢀꢀꢀ
(10i)
[0048]
||au[n]||≤a
max
,
ꢀꢀꢀ
(10j)
[0049]
其中r
th
表示用户服务质量门限,d
min
是避免无人机产生碰撞的最小距离,v
min
是固定翼无人机保持分析的最小速度,v
max
和a
max
是无人机的最大速度与加速度。(10b)是用户服务质量限制,(10e)避免了两个无人机之间发生碰撞,(10f)与(10g)满足无人机飞行的物理模型,(10h)表明无人机是周期运动的。
[0050]
第三步,设计算法解决无人机优化问题:
[0051]
(10)所表示的优化问题是一个具有多变量的非凸优化问题。因此,基于坐标将复杂问题划分为子问题的块坐标下降(bcd)技术可以有效地解决该问题,并且可以收敛到局部最优。
[0052]
3.1)首先给定功率分配,对无人机轨迹进行优化,轨迹优化问题可以建立为:
[0053][0054]
s.t.(10b),(10e)-(10j),
[0055]
其中其中是上次功率优化得到的最优值。
(11)是一个非凸的分式,为了有效处理它,首先将其转化为分母凹分子凸的形式,再通过dinkelbach方法解决。首先,将通过一阶泰勒展开转化为凹的,可以得到:
[0056][0057]
其中其中是上次优化得到的轨迹,可以表示成:
[0058][0059]
那么,给定发射功率时,就可以表示成:
[0060][0061]
同理,给定发射功率时的可以表示为:
[0062][0063]
其中可以表示为:
[0064][0065]
然后,通过引入变量vu[n]≤‖vu[n]‖,可以将分母转化为:
[0066][0067]
其额外引入的变量可以通过在的一阶泰勒展开近似转化为:
[0068][0069]
另外,限制(10e)仍然是非凸的,它可以转化为
[0070][0071]
其中
[0072]
根据上述简化,将原始轨迹优化问题(11)转化为具有凸集约束的凹-凸分式规划问题,该问题可以用dinkelbach方法求解,因此可以修改为:
[0073][0074][0075][0076]
‖vu[n]‖≤v
max
,
ꢀꢀꢀꢀ
(20d)
[0077]vu
[n]≥v
min
,
ꢀꢀꢀꢀ
(20e)
[0078]
(10f),(10g),(10h),(10j),(19),
[0079]
其中λr是一个常数,每次迭代后对它的值进行更新。
[0080]
3.2)接下来,根据(20)得到的无人机轨迹优化功率分配,由于此时推进功率与无人机轨迹相关,都是固定的,功率分配优化问题可以表示成:
[0081][0082]
s.t.(10b),(10c),(10d).
[0083]
其中通过上次轨迹优化得到。问题(21)的分子是非凸的,可以采用连续凸近似的思想对它进行转化,给定无人机飞行轨迹时可以通过转化与一节泰勒展开转化为:
[0084][0085]
其中其中和分别可以表示为:
[0086][0087]
其中可以通过上次功率分配优化得到。
[0088]
因此,给定飞行轨迹时的满足:
[0089][0090]
同样地,固定轨迹时可以表示为:
[0091][0092]
因此,功率分配优化问题(21)就可以表示为:
[0093]
[0094][0095][0096]
(10c),(10d).
[0097]
通过这种方式,原始的轨迹和功率分配联合优化问题被转化为两个凸优化子问题,可以通过算法1中总结的算法来解决。算法1中的常数λ
r+1
基于先前的优化值更新为:
[0098][0099]
3.3)设计交替优化算法
[0100]
通过上述方法,两个子问题(20)和(26)可分别转化为凸问题,可利用cvx工具解决。为了解决问题(10),提出一种算法交替优化两个子问题来解决原问题,具体步骤如下:
[0101]
3.3.1)设置初始值r=0,无人机轨迹qu[n]r,无人机速度vu[n]r,功率分配p[n]r,λr以及误差门限e
[0102]
3.3.2)重复
[0103]
3.3.3)采用上次优化得到的qu[n]r,vu[n]r,pu[n]r解决优化问题(20),得到最优飞行轨迹qu[n]
*
,vu[n]
*
,au[n]
*
[0104]
3.3.4)更新qu[n]
r+1
=qu[n]
*
和vu[n]
r+1
=vu[n]
*
[0105]
3.3.5)采用qu[n]
r+1
和pu[n]r解决优化问题(26),得到最优功率分配pu[n]
*
[0106]
3.3.6)更新pu[n]
r+1
=pu[n]
*
和λ
r+1
[0107]
3.3.7)r=r+1
[0108]
3.3.8)直到|λ
r+1-λr|<e
[0109]
3.3.9)得到优化的能效λr,轨迹qu[n]
*
,vu[n]
*
,au[n]
*
和功率分配pu[n]
*
[0110]
在无人机飞行期间,由于无人机飞行过程中的用户距离切换以及每次迭代中无人机轨迹的不确定性,为了简化起见,给定了每个noma对的用户和解码顺序。解码顺序由用户与固定点之间的距离决定。
[0111]
第四步,优化地面基站功率分配,最小化发射功率:
[0112]
4.1)首先建立地面基站优化问题。由于我们假设的信息先解码,因此应该是noma对中信道条件更好的用户,即那么在两个用户处的解码速率可以表示成:
[0113][0114]
并且由于可以得到为了两个用户都能成功解码,则
[0115]
通过sic消除干扰后,在处解码的速率为:
[0116][0117]
根据用户平均吞吐量与无人机服务用户相同的限制,功率最小化问题可以表示为:
[0118][0119][0120][0121]
其中是达到与无人机服务用户的平均吞吐量的门限,(30b)表示无人机基站和底面基站实现相同的服务质量。为了将非凸限制转化为凸集,利用与(22)相同的方法可以得到:
[0122][0123]
其中对进行化简,可以得到:
[0124][0125]
根据(31)和(32),原始优化问题(30)可以转化为:
[0126][0127][0128][0129][0130]
另外,地面基站的电路固定功耗为p
gc
。
[0131]
4.2)设计迭代算法解决优化问题
[0132]
通过上述方法,问题(30)转化为凸问题(33),可利用cvx工具解决。为了解决问题(33),提出一种迭代算法来解决原问题,具体步骤如下:
[0133]
4.2.1)设置初始值r=0,基站功率分配a'
wr
,优化目标初始值μr以及误差门限e
[0134]
4.2.2)重复
[0135]
4.2.3)采用上次优化得到的a'
wr
解决优化问题(33),得到最优功率分配a'
w*
[0136]
4.2.4)更新a'
wr+1
=a'
w*
,μ
r+1
=μr[0137]
4.2.5)r=r+1
[0138]
4.2.6)直到|μ
r+1-μr|<e
[0139]
4.2.7)得到优化的发射功率μr和功率分配a'
w*
[0140]
本发明的有益效果为:
[0141]
本发明将无人机与noma结合,采用无人机辅助现有通讯设施,在实现广域覆盖与大规模连接的情况下对系统进行节能设计,一方面通过无人机的轨迹优化延长无人机的巡航时间,另一方面也可以通过无人机辅助提高系统的能量效率。
附图说明
[0142]
图1为基于noma的无人机辅助大规模连接通信网络系统图。
[0143]
图2为大半径小区无人机优化轨迹与用户分布。
[0144]
图3为小半径小区无人机优化轨迹与用户分布。
[0145]
图4为不同周期下无人机飞行轨迹。
[0146]
图5为无人机飞行周期对能效的影响。
[0147]
图6为无人机发射功率对能效的影响。
具体实施方式
[0148]
为了更好的理解上述技术方案,以下结合附图以及具体的实施方式,给出具体分析。本实施例的具体步骤包括:
[0149]
第一步,构建系统模型:
[0150]
1.1)如图1为无人机辅助的大规模接入网络系统模型,无人机基站服务小区边缘用户,无人机基站与地面基站都采用noma,每个noma对由两个用户组成,共享同一个资源块,本实施例中带宽为b=180khz,每个无人机基站与地面基站都占用i=200个资源块,每个宏单元的半径为r=2000m,r'=1485m。
[0151]
将无人机的飞行时间t离散化为n个以δ
t
为步长的时隙,本实施例中t=100s,n=50。实施例中无人机基站在固定高度h=1000m飞行。中心地面基站的位置为l1=[0,0,50],基站高度zw=50m,用户的位置由matlab在服务区内随机按照均匀分布生成,且高度
[0152]
1.2)在系统模型中,表示一个维度为n
×
m的矩阵;||a||表示向量a的二范数;表示服从均值为μ方差为σ2的复高斯分布。
[0153]
第u个无人机基站到用户的信道是los信道,第n个时刻的信道可以表示成:
[0154][0155]
本实施例中,γu=(c/(4πf))2,其中c=3*108m/s,载波频率f=4.9ghz。第w个地面基站到用户的信道表示为:
[0156][0157]
本实施例中,通过matlab随机生成,γg=(c/(4πf))α是1m处的信道增益,α=2.6。
[0158]
在一个时隙内,接收到来自第u个无人机基站的信号为:
[0159][0160]
本实施例中的噪声功率通过计算,σ2是噪声功率谱密度,σ2=10-20.4
w/hz。
[0161]
接收到第w个地面基站的信号可以表示为:
[0162][0163]
由于无人机通信的能量供应是一个主要的瓶颈问题,首先对无人机的能量效率进行优化,然后在达到相同吞吐量的情况下最小化地面基站的发射功率,进而减少整体的能量消耗。
[0164]
第二步,根据第一步构建无人机基站能效优化模型,确定目标函数,列出优化问题:
[0165]
无人机服务用户传输速率可由(5)-(7)表示,本实施例中无人机基站最大发射功率p
ut
=5w。无人机的推进功率上限可以表示成:
[0166][0167]
本实施例中c1=1.852*10-3
,c2=4500,g=9.8m/s2。
[0168]
无人机飞行周期内的能量效率可以表示为:
[0169][0170]
本实施例中p
uc
=160w。
[0171]
为了在无人机实际运动模型与用户服务质量的限制下最大化能量效率,将无人机飞行轨迹qu、速度vu、加速度au和功率分配pu进行联合优化,得到的优化问题可以描述为
[0172][0173][0174][0175][0176][0177][0178]
[0179][0180]vmin
≤||vu[n]||≤v
max
,
ꢀꢀ
(10i)
[0181]
||au[n]||≤a
max
,
ꢀꢀ
(10j)
[0182]
本实施例中r
th
=1bit/s/hz,d
min
=50m,v
min
=10m/s,v
max
=100m/s,a
max
=5m/s2。
[0183]
第三步,根据第一步和第二步的参数设置以及(11)-(26)的转化设计算法解决优化问题:
[0184]
3.1)轨迹优化问题
[0185][0186][0187][0188]
‖vu[n]‖≤v
max
,
ꢀꢀꢀ
(20d)
[0189]vu
[n]≥v
min
,
ꢀꢀꢀꢀ
(20e)
[0190][0191][0192][0193]
||au[n]||≤a
max
,
ꢀꢀ
(10j)
[0194][0195]
本实施例中,无人机的初始轨迹设置为半径为r/2,中心为[0,0,0]的匀速圆周轨迹,初始速度根据初始轨迹与周期t进行计算。
[0196]
3.2)功率分配优化问题
[0197][0198][0199][0200][0201][0202]
本实施例中,为了达到优化问题的用户服务质量阈值限制,功率初始化时在每个时刻每组后解码用户分配的功率为总功率的9/2000,先解码用户分配的功率为总功率的1/2000。
[0203]
3.3)设计交替优化算法,具体步骤如下:
[0204]
3.3.1)设置初始值r=0,无人机轨迹qu[n]r,无人机速度vu[n]r,功率分配p[n]r,λr以及误差门限e
[0205]
3.3.2)重复
[0206]
3.3.3)采用上次优化得到的qu[n]r,vu[n]r,pu[n]r解决优化问题(20),得到最优飞行轨迹qu[n]
*
,vu[n]
*
,au[n]
*
[0207]
3.3.4)更新qu[n]
r+1
=qu[n]
*
和vu[n]
r+1
=vu[n]
*
[0208]
3.3.5)采用qu[n]
r+1
和pu[n]r解决优化问题(26),得到最优功率分配pu[n]
*
[0209]
3.3.6)更新pu[n]
r+1
=pu[n]
*
和λ
r+1
[0210]
3.3.7)r=r+1
[0211]
3.3.8)直到|λ
r+1-λr|<e
[0212]
3.3.9)得到优化的能效λr,轨迹qu[n]
*
,vu[n]
*
,au[n]
*
和功率分配pu[n]
*
[0213]
本实施例中规定解码顺序的固定点即服务区域横纵坐标中心点。
[0214]
第四步,根据第一步的参数设置与(28),(29)建立功率最小化问题并设计算法解决:
[0215]
4.1)功率最小化问题可以表示为
[0216][0217][0218][0219]
本实施例中根据无人机飞行周期的平均吞吐量计算而来,即
[0220]
根据(31)和(32),问题(30)可以转化为凸优化问题
[0221][0222][0223][0224][0225]
本实施例中,地面基站固定功耗p
gc
=270w。
[0226]
4.2)设计迭代算法解决优化问题,具体步骤如下:
[0227]
4.2.1)设置初始值r=0,基站功率分配a'
wr
,优化目标初始值μr以及误差门限e
[0228]
4.2.2)重复
[0229]
4.2.3)采用上次优化得到的a'
wr
解决优化问题(33),得到最优功率分配a'
w*
[0230]
4.2.4)更新a'
wr+1
=a'
w*
,μ
r+1
=μr[0231]
4.2.5)r=r+1
[0232]
4.2.6)直到|μ
r+1-μr|<e
[0233]
4.2.7)得到优化的发射功率μr和功率分配a'
w*
[0234]
为了与不采用无人机辅助的方案进行对比,本实施例设置了只采用地面基站覆盖等小面积的对比方案。另外,实施例中的能量效率均考虑带宽。下面将对比方案在不同场景下的表现,需要说明的是,如未特别说明,仿真参数均使用上述步骤中的参数。
[0235]
图2展示了小区较大、用户分布不十分密集的环境中无人机辅助通信方案的优化轨迹和用户分布。此时,两个无人机基站飞行一周的时间内所有用户的接收信息量为61.074gbit,推进消耗能量41.16kj,无人机基站发射信号以及电路消耗的能量33kj。每个地面基站为了达到与单个无人机基站相同平均吞吐量,四个地面基站在一个周期时间内的总发射能耗为740kj,电路消耗能量108kj。因此,总体的能量效率为199kbit/j。在对比方案中,要在相同用户密度与覆盖面积的条件下达到相同的平均吞吐量,需要采用6个地面基站通过noma进行覆盖,在一个周期时间内的总发射能耗为1095.6kj,电路消耗能量162kj,此时,对比方案的能量效率为146kbit/j。无人机辅助的方案可以有效降低能耗,将能量效率提升了36%。
[0236]
图3展示了小区较小、用户分布密集的环境中无人机辅助通信方案的优化轨迹和用户分布。小区半径设置为r=500m,路径损耗指数设置为α=2.8,无人机飞行周期设置为t=50s。此时,两个无人机基站飞行一周的时间内所有用户的接收信息量为35.568gbit,推进消耗能量22.18kj,无人机基站发射信号以及电路消耗的能量16.5kj。每个地面基站为了达到与单个无人机基站相同平均吞吐量,四个地面基站在一个周期时间内的总发射能耗为315.6kj,电路消耗能量54kj。因此,总体的能量效率为261kbit/j。在对比方案中,要在相同用户密度与覆盖面积的条件下达到相同的平均吞吐量,需要采用6个地面基站通过noma进行覆盖,在一个周期时间内的总发射能耗为466.8kj,电路消耗能量81kj,此时,对比方案的能量效率为195kbit/j。无人机辅助的方案可以有效降低能耗,将能量效率提升了34%。
[0237]
图4展示了不同周期下无人机基站1的最优轨迹。从图中可以看出经过提出的算法优化轨迹后,无人机的飞行轨迹集中于服务区域的中心附近,以有效提高用户吞吐量。并且,优化后的轨迹十分平滑,且转弯半径很大,这可以有效避免过大的加速度而引起的额外推进消耗,体现了轨迹优化算法的有效性。
[0238]
图5展示了无人机飞行周期对能量效率的影响。从结果可以看出,对于不同半径的小区,无人机的最佳飞行周期是不同的。半径越小的小区,能量效率受到飞行周期的影响越大,可以根据小区的半径合理选择合适的飞行周期。
[0239]
图6展示了不同轨迹优化与用户配对方法的影响。其中,圆形轨迹是以推进功耗最小的半径飞行的轨迹。可以看出相对于功耗最小的圆形轨迹和不考虑距离的随机用户配对方法,所提出的轨迹优化和用户配对的方法能有效地提高无人机的能量效率。
[0240]
以上所述实施例仅表达本发明的实施方式,但并不能因此而理解为对本发明专利的范围的限制,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1