无人机集群通信的抖动信道估计系统
本发明属于悬空平台上移动通信信道估计,具体涉及无人机集群通信的抖动信道估计系统。
背景技术:
1、1)研究现状
2、无人机群通信在不同环境中,悬空平台的抖动问题是不可避免的,其抖动对通信的可靠性有极大影响。第五代移动通信技术出现后,thoma在其理论研究的基础之上,首次提出了5g的前沿技术,即大规模mimo技术。目前5g的毫米波技术已经趋于成熟。毫米波具有非常大的技术优势,包括充足的5g带宽、窄的波束宽度等。毫米波的特点适用在无人机平台,有效地稳定其抖动影响。国内外的几种传统的信道估计方案如基于压缩感知的信道估计等,都不能有效的降低无人机平台的抖动影响。
3、2)关键技术
4、1.无人机集群技术
5、随着无人机自主化和网络化通信技术的发展,无人机在民用、商用等领域发挥着越来越重要的作用。单架无人机由于受到探测能力、载荷等因素限制,难于完成复杂的任务。采用多架无人机协同方式,无人机之间通过通讯,进行信息共享,扩大对环境态势的感知,实现协同任务分配、协同搜索、侦察与攻击,能有效提高无人机的生存能力和整体运作效能。
6、2.大规模mimo技术
7、多入多出技术(multiple-input multiple-output,mimo)通信技术,在发射端和接收端分别使用多个发射天线和接收天线,使信号通过发射端与接收端的多个天线传送和接收,改善通信质量。它能充分利用空间资源,通过多个天线实现多发多收,在不增加频谱资源和天线发射功率的情况下,可以成倍的提高系统信道容量,显示出明显的优势、被视为下一代移动通信的核心技术。
8、大规模mimo的空间分辨率与现有mimo相比显著增强,能深度挖掘空间维度资源,使得网络中的多个用户可以在同一时频资源上利用大规模mimo提供的空间自由度与基站同时进行通信,从而在不需要增加基站密度和带宽的条件下大幅度提高频谱效率。大规模mimo可将波束集中在很窄的范围内,从而大幅度降低干扰。大规模mimo可大幅降低发射功率,从而提高功率效率。
9、3.混合波束成形技术
10、波束成形技术在mimo通信系统中是一种非常重要的技术。波束成形是一种发射端的空间过滤机制,将信号以集中和定向的方式发送给接收端的,提高接收功率及信噪比。波束成形技术成型于802.11n协议,并沿用至802.11ac和ax协议,包括模拟波束成形与数字波束成形。
11、模拟波束成形技术使用,成本比较低的模拟移相器,只能调整相位而不能调整幅度,产生波束不一定准确。数字波束成形技术,每根天线对应一条射频链路,产生波束是多条rf链路共同参与,可以实现多个数据流共同传输。数字波束成形使用复杂的硬件结构,可以灵活的调整相位和幅度,产生准确的波束。当天线数量多时,要求的rf链路多,成本很高。对于大规模mimo系统,结合两者优点,提出了一种混合波束成形技术,在满足硬件条件下,使其增益尽可能达到数字波束成形的效果。
12、4.迭代重加权技术
13、为了提高信道估计的精度,并且获得准确的信道状态信息,在此提出一种迭代重加权ir算法。它主要是利用权重参数对到达/离开角度的稀疏程度和数据拟合误差进行控制,将系统估计到的到达/离开角利用迭代法求取最优解,从而达到实现超分辨率信道估计的目标。
14、在毫米波大规模mimo框架中,由于传统的信道估计方法,例如基于压缩感知的信道估计,会出现比较严重的估计精度难题和由于角度量化造成的损失。因此,本发明提出一种基于迭代重加权算法的信道估计方案,通过迭代优化到达角/离开角(angle ofarrival/angle of departure,aoa/aod)角度,提高信道估计精度,尤其在抖动信道的估计中鲁棒性更好。
技术实现思路
1、本发明是为了克服现有技术中,无人机群通信时因抖动原因造成的信道估计精度较差的问题,提供了一种能实现在无人机集群通信中aoa、aod和路径增益的稳健超分辨率性能估计,进而抑制或降低无人机悬空平台抖动问题的无人机集群通信的抖动信道估计系统。
2、为了达到上述发明目的,本发明采用以下技术方案:
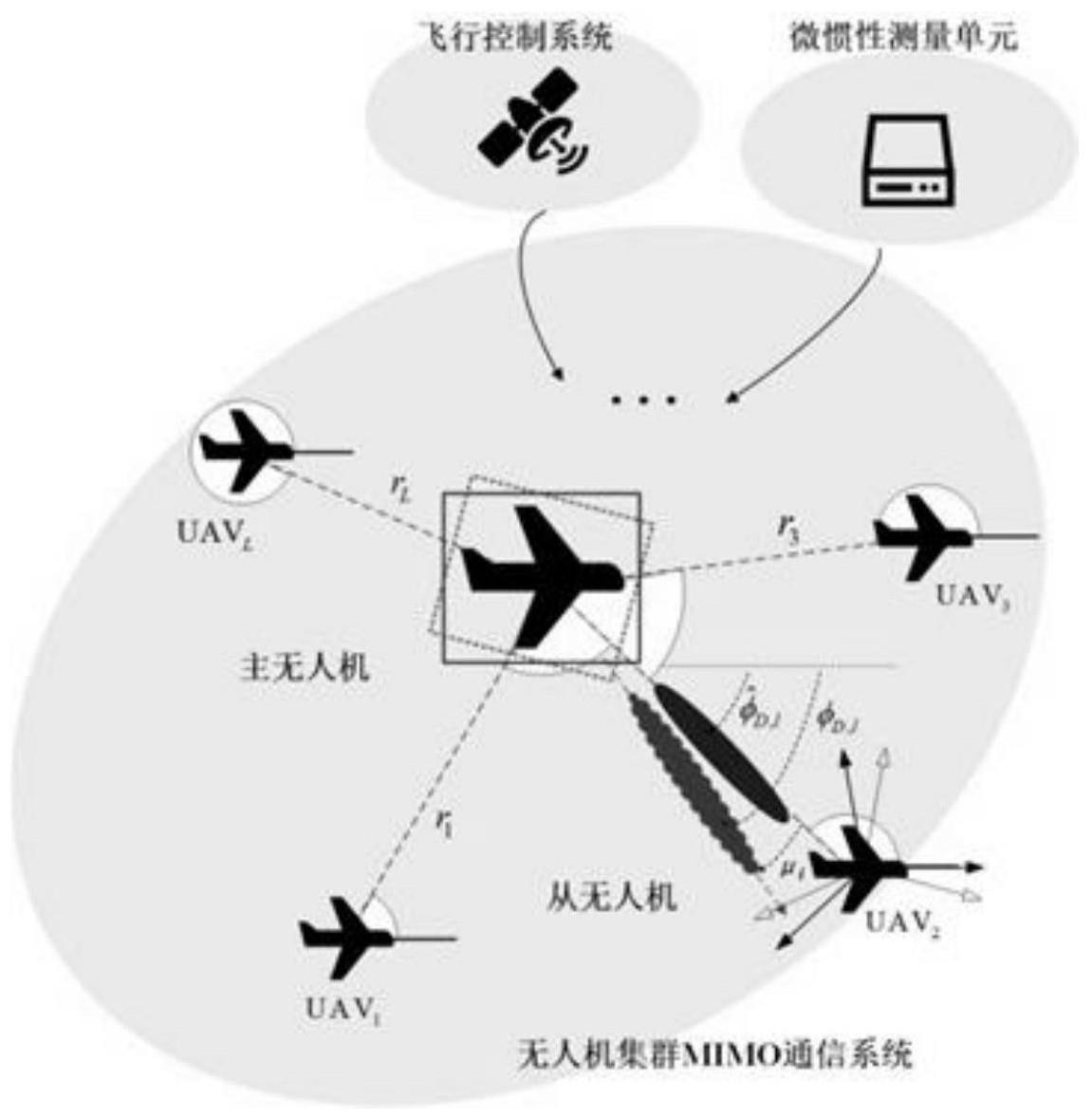
3、无人机集群通信的抖动信道估计系统,包括:
4、主无人机,用于向从无人机发送数据流,由只有水平维度的ula天线和同时有水平维度与垂直维度的upa天线发送;
5、从无人机,用于接收信号,由只有水平维度的ula天线和同时有水平维度与垂直维度的upa天线接收;
6、混合波束成形模块,用于对数据流进行混合波束成形,由模拟波束成形和数字波束成形构成;
7、无线通信信道,所述无线通信信道包括多条传播路径,且传播时延和衰落因子是时变的,呈多径衰落;所述无线通信信道通过迭代重加权方式进行信道估计。
8、作为优选,所述模拟波束成形只改变相位,包括一条rf链路;所述数字波束成形同时改变相位和幅度,包括多条rf链路;所述模拟波束成形的维度大于数字波束成形。
9、作为优选,所述无线通信信道通过迭代重加权方式进行信道估计的具体过程如下:
10、引入正则化参数λ,用于在稀疏度和数据拟合错误之间进行权衡;λ的迭代更新计算式如下:
11、λ=min(d/r(i),λmax), (6)
12、其中,d为比例常数因子,i为迭代次数,λmax是为了使得正则化参数λ的取值取得更加合理的恒定常量,具体为10-8,r(i)是第i次迭代的平方残差;
13、所述迭代重加权方式从角度区域的栅格点开始迭代运行,在第i次迭代中,算法的目标是估计的和附近寻找新的估计和使目标函数变小;采用梯度下降方法对估计角度项进行搜寻:
14、
15、其中,η是选择的步长,是优化得到的目标函数,是到达角,是离开角,是对目标函数的求偏导,是对目标函数的求偏导。
16、作为优选,所述ula天线为均匀线性阵列;设定ula天线d=λ/2阵列包括m个阵元,m个阵元等距离排列成一条直线,阵元间距为d,取,所述ula天线方向向量定义为:
17、
18、其中,θi是到达角的仰角,即x轴方向的仰角。
19、作为优选,所述upa天线为均匀平面阵列;设定upa天线阵列在x轴方向有n个间距为d的均匀线阵,y轴方向有m个间距为d的均匀线阵,即m×n个阵元
20、所述upa天线方向矩阵定义为:
21、
22、
23、其中,d代表发送接收天线的间隔距离;λ表示收发信号的波长;θi,分别为x轴方向和y轴方向的仰角;和分别为沿x轴和沿y轴的导向矢量。
24、作为优选,所述主无人机的发射端设有若干个天线;所述从无人机的接收端设有若干个天线。
25、作为优选,所述主无人机与从无人机之间采用毫米波mimo通信;所述毫米波mimo通信参数如下:
26、发送天线数和接收天线数设置为nt=nr=64,发送导频信号和接受导频信号数量设置为nx=ny=32,传播路径数初始值l=3,射频链数天线距离d=λ/2,λ=0.5;路径增益设定为高斯函数即:传输导频的每个元素满足其中ρ是发射功率,ωi,j表示在[0,2π)上均匀分布的随机相位;信噪比其中是噪声方差。
27、本发明与现有技术相比,有益效果是:(1)本发明优化发射模块,使得发射信号的波束窄,信噪比低:发射模块结合毫米波大规模mimo特性、upa和ula天线阵列模型;(2)本发明采用混合波束成形设计,主无人机对发送信号进行混合波束成形,使得发射信号充分利用空间资源,提高系统的信道容量,显示出明显优势;(3)考虑无人机集群通信的悬空平台抖动问题,对系统进行了建模;(4)本发明信道估计的鲁棒性优秀:通过与传统的两种信道估计方案进行仿真比较,基于ir的信道估计方案的鲁棒性更好;在迭代时,角度的估计值会变得越来越精确,最后直到新的估计值与前一个结果几乎相同,这样使得在无人集群通信环境下抖动信道的信道估计的精度更高,鲁棒性更好。
- 还没有人留言评论。精彩留言会获得点赞!