一种具有局部强光的弱光场景成像自动曝光方法及系统
本发明主要涉及成像,特指一种具有局部强光的弱光场景成像自动曝光方法及系统。
背景技术:
1、成像技术能够获取场景光照强度和光谱的分布,包含了丰富的场景形貌和颜色信息,因此被广泛应用于关键参数检测、远程飞行制导、目标识别与分类、设备状态监控和公共安防监视等领域。不同应用场景具有不同的光照条件,为了获得高质量的场景图像,通常采用自动曝光算法对图像亮度进行调节。因此与场景光照环境匹配的自动曝光算法对增强获取图像的质量、增加图像包含的目标信息量以及提高视觉算法的应用效果具有重要意义。
2、现有的自动曝光方法在光照均匀的场景能够取得良好的曝光效果,但当场景光照微弱并存在局部强光时,现有的自动曝光方法难以发挥出令人满意的效果。如在安防监控领域中,室外场景由白天到夜晚,存在路灯、车灯等局部强光,或室内场景熄灯之后,存在窗外透射进来的局部强光,由于现有的自动曝光算法主要根据图像的整体均值进行调整,在局部强光的干扰下会引起场景的暗区域曝光不足,而暗区域包含了场景的大部分信息,曝光不足将会损失大量的场景细节信息,严重影响安防监控的正常工作。
3、针对上述问题,本发明提出了一种具有局部强光的弱光场景成像自动曝光方法及系统,能够使相机在有局部强光干扰的弱光环境中获取到更多的场景信息,提高复杂光照环境下的安防监控效果。
4、公开号为cn 114095667 b的专利公开了一种自动曝光方法、装置、电子设备及存储介质。该专利提出了一种自动曝光方法、装置、电子设备及存储介质,将图像中超过预设阈值的像素灰度取平均作为整幅图像的亮度均值,根据其与目标亮度的差值对曝光值进行调整,使图像的亮度均值达到目标亮度均值,提升图像的视觉效果。
5、但是该专利只考虑了图像中高亮度区域的曝光效果,仅适用于只对高亮区域进行曝光成像的场景,难以应用于弱光成像的场景。
6、公开号为cn 114140449 a的专利公开了一种自动曝光的控制方法和装置。该专利提出了一种自动曝光的控制方法和装置,通过将图像分成两个区域并赋予不同权重得到自动曝光统计值,根据其与预设值的差值进行曝光调整,从而使其中一个区域内的目标清晰。
7、但是该专利的分界方法仅能区分天空与地面,并且曝光效果取决于权重的分配,应用场景和效果均受到较大限制。
8、公开号为cn 111835961 b的专利公开了一种相机自动曝光的信息处理方法、装置及存储介质。该专利提出了一种相机自动曝光的信息处理方法、装置及存储介质,通过对图像进行语义分割确定至少一个目标物,并根据目标物的重要程度、在图像中的面积占比和理想亮度确定曝光量,进而使成像效果更好。
9、但是该专利的语义分割需要大量高质量图像进行训练,部分弱光场景可能难以提供训练数据,且此专利的曝光方法更适用于提高确定目标物的成像效果,难以作用于整个场景的成像。
技术实现思路
1、本发明提供的具有局部强光的弱光场景成像自动曝光方法及系统,解决了现有曝光方法在弱光环境中受局部强光干扰导致场景暗区域曝光不足的技术问题。
2、为解决上述技术问题,本发明提出的具有局部强光的弱光场景成像自动曝光方法包括:
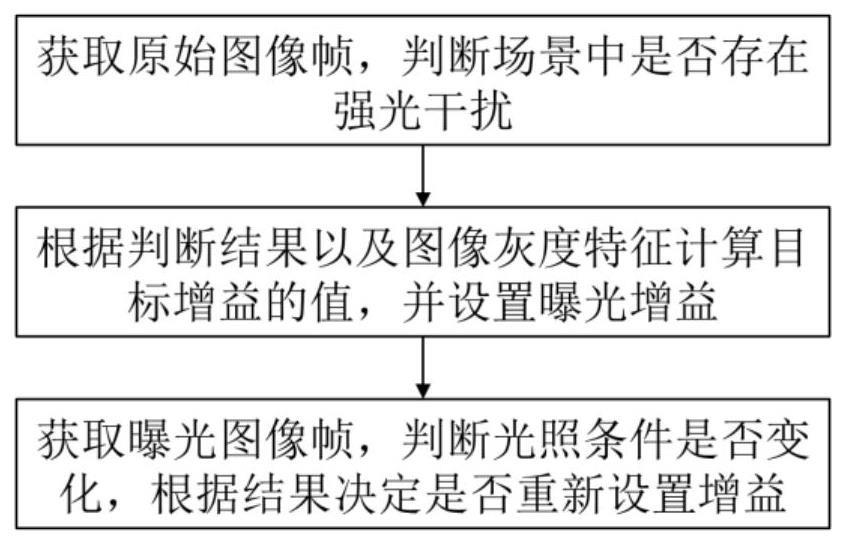
3、获取相机增益为0时的原始图像帧,并根据原始图像帧,判断弱光场景中是否存在强光干扰;
4、根据弱光场景中是否存在强光干扰的判断结果和原始图像帧的灰度特征,计算并调整相机的目标增益;
5、获取调整目标增益后的原始曝光图像帧,并根据当前图像帧和原始曝光图像帧判断光照是否发生变化,原始曝光图像帧具体为调整目标增益后获取的第一帧图像;
6、当判定光照发生变化时,将相机增益设置为0,重新获取相机增益为0时的原始图像帧并根据原始图像帧重新判断强光干扰以及调整相机的目标增益,依此循环。
7、进一步地,根据原始图像帧,判断弱光场景中是否存在强光干扰包括:
8、将原始图像帧的灰度分布直方图分为预设数目的直方图子区域;
9、计算直方图子区域的下降梯度算子,并根据下降梯度算子获得低灰度边界;
10、计算直方图子区域的上升梯度算子,并根据上升梯度算子获得高灰度边界;
11、根据原始图像帧的灰度分布直方图、低灰度边界和高灰度边界,判断弱光场景中是否存在强光干扰。
12、进一步地,将原始图像帧的灰度分布直方图分为预设数目的直方图子区域具体为:
13、
14、其中,n表述预设的直方图子区域数目,s(n)表示第n个直方图子区域的像素数量,n(i)表示灰度值为i的像素数量;
15、计算直方图子区域的下降梯度算子,并根据下降梯度算子获得低灰度边界,具体为:
16、
17、其中,gd(n)表示第n个直方图子区域的下降梯度幅值,n1表示低灰度边界所在的直方图子区域的序号,i1表示低灰度边界对应的灰度值;
18、计算直方图子区域的上升梯度算子,并根据上升梯度算子获得高灰度边界,具体为:
19、
20、其中,gr(n)表示第n个直方图子区域的上升梯度幅值,n2表示高灰度边界所在的直方图子区域的序号,i2表示高灰度边界对应的灰度值。
21、进一步地,根据原始图像帧的灰度分布直方图、低灰度边界和高灰度边界,判定弱光场景中存在强光干扰需满足的公式为:
22、
23、其中,i1和i2分别表示低灰度边界和高灰度边界对应的灰度值,imax表示原始图像帧的最大灰度值。
24、进一步地,根据弱光场景中是否存在强光干扰的判断结果和原始图像帧的灰度特征,计算相机的目标增益包括:
25、当判定弱光场景中存在强光干扰时,根据低灰度边界对应的灰度值计算相机的目标增益,当判定弱光场景中不存在强光干扰时,根据原始图像帧的灰度特征和原始图像帧中无效像素数占总像素数的比例阈值计算相机的目标增益。
26、进一步地,根据低灰度边界对应的灰度值计算相机的目标增益的具体公式为:
27、
28、其中gdb为相机的目标增益,i1表示低灰度边界对应的灰度值。
29、进一步地,根据原始图像帧的灰度特征和原始图像帧中无效像素数占总像素数的比例阈值计算相机的目标增益的具体公式为:
30、
31、
32、其中,gdb为相机的目标增益,it为原始图像帧的最大有效灰度值,imax表示原始图像帧的最大灰度值,n(i)表示灰度值为i的像素数量,nt为无效像素数占总像素数的比例阈值,且无效像素的数量通过统计大于原始图像帧最亮区域的均值获得。
33、进一步地,根据当前图像帧和原始曝光图像帧判断光照是否发生变化包括:
34、计算当前图像帧和原始曝光图像帧的平均灰度的差值,具体计算公式为:
35、
36、其中,gc和go分别表示当前图像帧和原始曝光图像帧的平均灰度值,nc(i)和no(i)分别表示当前图像帧和原始曝光图像帧中灰度值为i的像素数量,当原始曝光图像帧的平均灰度值与当前图像帧的平均灰度值的差大于阈值时,判定光照发生变化,其中nt表示预设的光照变化阈值。
37、本发明提供的具有局部强光的弱光场景成像自动曝光系统包括:
38、存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现本发明提供的具有局部强光的弱光场景成像自动曝光方法的步骤。
39、本发明提出了一种具有局部强光的弱光场景成像自动曝光方法及系统,通过获取相机增益为0时的原始图像帧,并根据原始图像帧,判断弱光场景中是否存在强光干扰;根据弱光场景中是否存在强光干扰的判断结果和原始图像帧的灰度特征,计算并调整相机的目标增益;获取调整目标增益后的原始曝光图像帧,并根据当前图像帧和原始曝光图像帧判断光照是否发生变化,原始曝光图像帧具体为调整目标增益后获取的第一帧图像;当判定光照发生变化时,将相机增益设置为0,重新获取相机增益为0时的原始图像帧并根据原始图像帧重新判断强光干扰以及调整相机的目标增益,依此循环,解决了现有曝光方法在弱光环境中受局部强光干扰导致场景暗区域曝光不足的技术问题,使相机能够在有局部强光干扰的弱光环境中获取到更多的场景图像信息,提高了复杂光照环境下的图像成像效果。
- 还没有人留言评论。精彩留言会获得点赞!