无人机抗控制抗截获通信波形设计方法、装置及系统与流程
本发明涉及无人机通信领域,更为具体的,涉及一种无人机抗控制抗截获通信波形设计方法、装置及系统。
背景技术:
1、无人机通信是否具备优越的抗控制及抗截获能力已成为无人机平台提高生存能力关键因素。然而通信速率越高、容量越大、距离越远意味着被截获的风险越大,如何在保证高速率、远距离传输时,尽可能提高无人机通信的抗截获能力,是一个亟待解决的难题。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种无人机抗控制抗截获通信波形设计方法、装置及系统,具备非平稳抗侦测通信波形具备抗检测能力、抗参数测量能力、抗信号识别能力、抗解调能力及抗多普勒能力强的特点,且业务信息速率和扩频速率设置灵活。
2、本发明的目的是通过以下方案实现的:
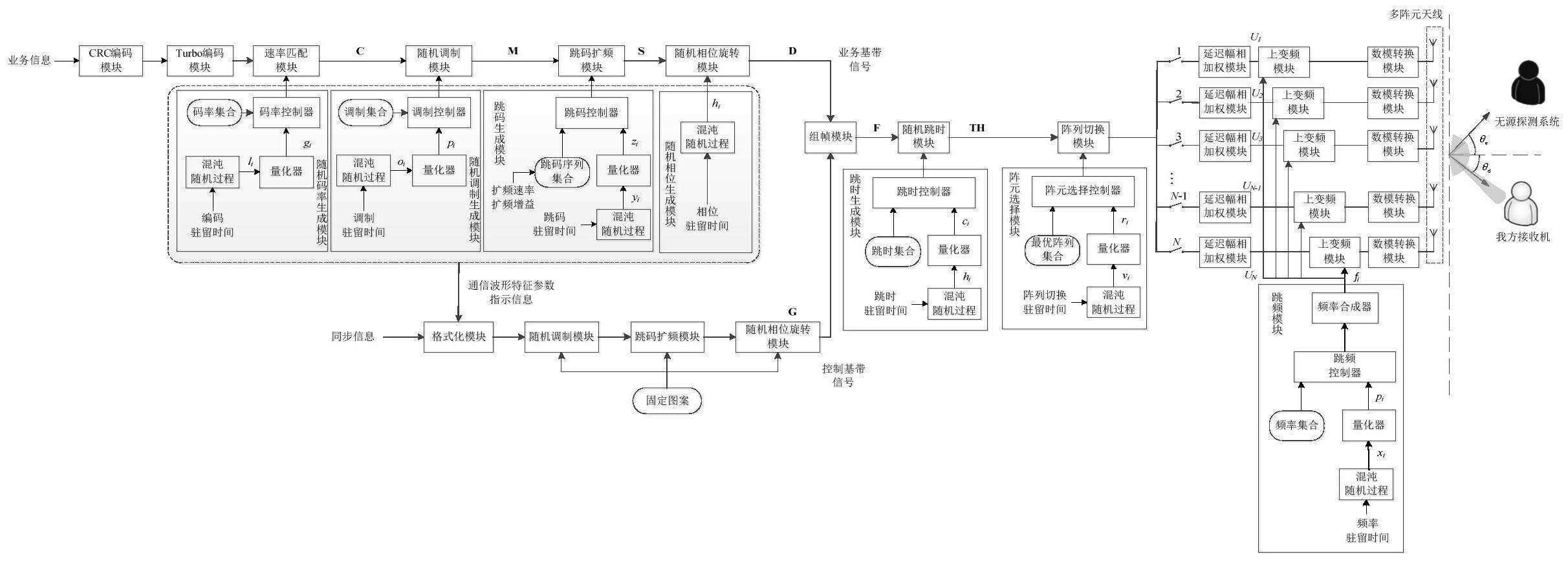
3、一种无人机抗控制抗截获通信波形设计方法,包括步骤:
4、引入随机过程设置速率匹配模块参数、随机调制模块参数、跳码扩频模块参数、随机相位旋转模块参数、随机跳时模块参数、跳频模块参数和阵列切换模块参数,生成抗控制抗截获通信波形。
5、进一步地,在生成抗控制抗截获通信波形之后,还包括步骤:在接收端接收所述抗控制抗截获通信波形。
6、进一步地,所述引入随机过程设置速率匹配模块参数、随机调制模块参数、跳码扩频模块参数、随机相位旋转模块参数、随机跳时模块参数、跳频模块参数和阵列切换模块参数,包括如下子步骤:
7、s1,产生时隙内传递用户数据的业务信息,经crc编码模块、turbo编码模块和速率匹配模块得到编码序列c,速率匹配模块由随机码率生成模块控制以得到不同码率的编码序列,其中随机码率生成模块由混沌随机过程产生第i个编码驻留时间的实值li经量化器得到量化值gi以指引码率控制器从码率集合中随机选取当前使用的编码码率;
8、s2,编码序列c经随机调制模块得到调制序列m,随机调制模块由随机调制生成模块控制,其中随机调制生成模块由步骤s1中的混沌随机过程产生第i个调制驻留时间的实值oi经量化器得到量化值pi以指引调制控制器从调制集合中随机选取当前使用的调制类型;
9、s3,调制序列m经跳码扩频模块得到跳码扩频序列s,跳码扩频模块由跳码生成模块控制,其中跳码生成模块由步骤s1中的混沌随机过程产生第i个跳码驻留时间的实值yi经量化器得到量化值zi以指引跳码控制器从跳码序列集合中随机选取当前使用的扩频增益和扩频速率的扩频码序列,扩频速率和业务信息速率的本振频率是非同源的,不同扩频码具备良好的互相关特性;
10、s4,跳码扩频序列s经随机相位旋转模块得到业务信息基带信号d,随机相位旋转模块由随机相位生成模块控制,其中随机相位生成模块由步骤s1中的混沌随机过程产生第i个相位驻留时间的实值hi作为偏移相位,即:
11、di=si×exp(-jcomplex2πhi)
12、其中di和si分别为第i个相位驻留时间的业务基带信号和跳码扩频信号,jcomplex为虚数标识;
13、s5,将时隙内随机码率生成模块、随机调制生成模块、跳码生成模块和随机相位生成模块所使用的混沌随机过程初始值作为通信波形特征参数指示信息,以指导接收端对业务基带信号的处理;
14、s6,将同步信息和通信波形特征参数指示信息经格式化模块组合后,采用固定图案依次经过随机调制模块、跳码扩频模块和随机相位旋转模块得到控制基带信号,其中扩频速率和控制信息速率的本振频率是同源的;
15、s7,将业务基带信号和控制基带信号经组帧模块后,得到时隙辐射信号f,经随机跳时模块产生辐射时间抖动,随机跳时模块由跳时生成模块控制,其中跳时生成模块由步骤s1中的混沌随机过程产生第i个跳时驻留时间的实值hi经量化器得到量化值ci以指引跳时控制器从跳时集合中随机选取当前使用的辐射起始时间;
16、s8,随机跳时模块输出的基带信号th,经过阵列切换模块随机选择一维线性阵列本次切换驻留时间内导通的阵元组合,然后导通阵元通道内的延迟幅相加权模块分别对基带信号th进行延迟、幅相加权处理,使得合成信号主波束对准我方接收机,阵列切换模块由阵列选择模块控制,其中阵列选择模块由步骤s1中的混沌随机过程产生第i个阵列切换驻留时间的实值vi经量化器得到量化值ri以指引阵元选择控制器从最优阵列集合中随机选取当前使用的阵元组合;
17、s9,多路信号经延迟幅相加权模块处理后的信号向量u=[u1,u2,…,un],经上变频处理和数模转换处理,最后由多阵元天线辐射至信道,其中n为多阵元天线的阵元数目,上变频的载波频率由跳频模块产生,跳频模块由步骤s1中的混沌随机过程产生第i个频率驻留时间的实值xi经量化器得到量化值pi以指引跳频控制器从频率集合中随机选取当前使用的频率。
18、进一步地,所述在接收端接收所述抗控制抗截获通信波形,包括子步骤:
19、s10,接收端对接收信号进行下变频处理,再经模数转换模块及带通滤波器处理,得到数字中频信号if,即:
20、
21、式中if(k)为第k个采样时刻中频信号,ψ(k)和n(k)为第k个采样时刻基带信号和高斯噪声,为接收中频频率,θ为相位偏差,t为采样时间;
22、s11,捕获模块根据已知的同步信息和固定图案的基带处理方式,得到本地同步基带信号,根据已知频率集合样本,同时对中频信号进行并行下变频处理,并与本地同步基带信号进行相关及门限检测,将过门限的最大相关峰值对应的频率和时刻估计作为当前时隙所采用的跳频频率和起始时刻;然后利用本地同步基带信号消除接收同步段信息相位,得到已消去信息相位后且长度为l0的接收同步信号y,即:
23、
24、
25、式中为多普勒频率,n'(k)为基带高斯噪声,y(k)为y的第k个采样时刻信号,*为共轭运算;对y依次进行前后时刻采样信号的相位差分,加权,累积平均操作,完成对δf的最小均方无偏估计即:
26、
27、
28、
29、式中为多普勒无偏估计,w(·)为加权窗函数,r(·)为时域自相关函数,arg(·)为取相位运算;最后利用多普勒无偏估计抵消掉多普勒线性相位的影响,估计出相位偏差即:
30、
31、s12,跟踪模块根据捕获模块输出的多普勒无偏估计和相位偏差产生本地初始载波,分别基于已知的固定图案和控制信道提供的通信波形特征参数指示信息的基带处理方式分别再生经随机相位旋转后的控制信道和业务信道本地扩频信号,采用载波环路、码环路和调制符号环路联动的方式,将本地信号与接收信号的载波相位差、载波频率差、码相位差和调制符号相位差作为输入,依次调整接收机载波本振频率、扩频码速率本振频率和信息速率本振频率,完成对接收控制信号和业务信号的载波相位同步、码元同步和调制符号同步;
32、s13,跟踪模块输出的已同步控制基带信号,根据已知的固定图案处理方式,依次进行解随机相位旋转模块、跳码解扩模块和基带解调模块得到波形特征指示参数;
33、s14,跟踪模块输出的已同步业务基带信号,根据控制基带信号解析出的通信波形特征参数指示信息的处理方式,依次经过解随机相位旋转模块、跳码解扩模块、基带解调模块、turbo译码模块和crc译码模块恢复出业务信息。
34、进一步地,在步骤s8中,所述最优阵列集合满足如下约束条件:
35、s81,最小化阵列副瓣电平约束条件:
36、{asidelobe|psidelobe≤thsidelobe}
37、
38、s={θ||θmin≤θ≤θd-δθ/2∪θd+δθ/2≤θ≤θmax}
39、
40、式中psidelobe为导通的阵列集合经幅相加权后的平均副瓣电平,thsidelobe为平均副瓣门限,f(θ)为方向为θ的天线增益,s为副瓣角度范围,snum为副瓣角度范围样本数,θmin为副瓣角度范围下限,θmax为副瓣角度范围上限,δθ为3db主瓣宽度,fn(θ)为第n个阵元方向图,θd为通信目标方向,asidelobe为满足psidelobe≤thsidelobe约束条件的阵列集合且a=[a1,a2,...,an],an为第n个阵元导通开关,取值为0或1,λ为载波波长,d为线性阵列相邻阵元间距;
41、最小化目标方向失真约束条件:
42、{atarget|λtarget≤thtarget}
43、λtarget=∑|dif(θd)-di|
44、式中λtarget为目标方向失真度,thtarget为目标方向失真度门限,di为业务信息已调信号d的第i个调制星座点,atarget为满足λtarget≤thtarget约束条件的阵列集合且atarget=[a1,a2,...,an],an为第n个阵元导通开关,取值为0或1;
45、最大化非目标方向失真约束条件:
46、{anon-target|λnon-target≥thnon-target}
47、
48、式中λnon-target为非目标方向失真度,thnon-target为非目标方向失真度门限,anon-target为满足λnon-target≥thnon-target约束条件的阵列集合且anon-target=[a1,a2,...,an],an为第n个阵元导通开关,取值为0或1,step为角度步长,mmod为调制阶数;
49、s82,设定平均副瓣门限thsidelobe、目标方向失真度门限thtarget和非目标方向失真度门限thnon-target,对步骤s81中三种约束条件下的数学模型进行求解,得到最优阵列集合,根据不同阵列切换驻留时间从最优阵列集合中随机选取阵列组合进行多阵元的辐射切换。
50、进一步地,在步骤s12中,所述本地信号与接收信号的载波相位差、载波频率差、码相位差和调制符号相位差的计算方法分别如下:
51、载波相位差和载波频率差:首先再生第i个相干积分时间内经随机相位旋转后的控制信道或业务信道本地扩频信号ψ(k),然后利用多普勒无偏估计和相位偏差初始化本地载波,对接收信号下变频处理后再与本地扩频信号ψ(k)进行相干积分后取相位操作,得到载波相位残差即:
52、
53、式中tcoh为相干积分时间,t为采样时间,*为取共轭运算,τi为第i个相干积分时间内本地扩频信号与接收信号码相位偏差,φi为第i个相干积分时间内载波相位残差,为第i个相干积分时间内接收机载波本振频率且初始化为为第i个相干积分时间内接收机载波初始相位且初始化为mod(a,b)为a对b求模操作;
54、通过对相邻两个相干积分时间载波相位残差进行差分运算,得到载波频率残差即:
55、
56、最后利用无限长单位冲击响应数字滤波器对φi和fi进行滤波处理,完成对载波本振频率的更新,即:
57、
58、
59、
60、
61、
62、
63、
64、
65、ω1=1.275×bloop
66、式中c0,c1,c2,e0,e1和e2分别为无限长单位冲击响应数字滤波器权系数,ω1为振荡频率,k为环路增益,bloop为环路带宽;
67、第i个相干积分时间内接收机载波初始相位更新为:
68、
69、码相位偏差:
70、首先再生第i个相干积分时间内经随机相位旋转后的控制信道或业务信道本地扩频信号ψ(k),然后对ψ(k)进行超前和滞后码相关间隔tdll操作,得到超前本地扩频信号ψ(k+tdll)和滞后本地扩频信号ψ(k-tdll),然后利用下变频后的接收基带信号分别与超前本地扩频信号ψ(k+tdll)和滞后本地扩频信号ψ(k-tdll)相干积分处理后完成码相位偏差运算,即:
71、
72、
73、
74、式中和分别是第i个相干积分时间内接收基带信号与超前本地扩频信号ψ(k+tdll)和滞后本地扩频信号ψ(k-tdll)的积分结果,ticode=1/ficode为第i个相干积分时间内本地扩频码片持续时间,ficode为第i个相干积分时间内扩频码本振频率,和分别为第i个相干积分时间内接收噪声与超前本地扩频信号ψ(k+tdll)和滞后本地扩频信号ψ(k-tdll)的积分结果;
75、最后利用无限长单位冲击响应数字滤波器对τi进行滤波处理,完成对扩频码本振频率的更新,即
76、
77、ω2=1.886×bloop
78、式中k为环路增益,bloop为环路带宽,ω2为振荡频率;
79、调制符号相位偏差:首先设定调制符号相关间隔tmll,分别提取[itcoh-tmll,(i+1)tcoh-tmll],[itcoh,(i+1)tcoh],[itcoh+tmll,(i+1)tcoh+tmll]积分时间内的接收信号,然后对三类信号下变频后与本地扩频信号进行相干积分处理,即:
80、
81、
82、
83、式中,为相关积分时间[itcoh,(i+1)tcoh]内接收信号与本地信号的积分结果,为相关积分时间[itcoh,(i+1)tcoh]内接收噪声与本地信号的积分结果;为相关积分时间[itcoh-tmll,(i+1)tcoh-tmll]内接收信号与本地信号的积分结果,为相关积分时间[itcoh,(i+1)tcoh]内接收噪声与本地信号的积分结果;为相关积分时间[itcoh+tmll,(i+1)tcoh+tmll]内接收信号与本地信号的积分结果,为相关积分时间[itcoh,(i+1)tcoh]内接收噪声与本地信号的积分结果;timod=1/fimod为第i个相干积分时间内本地调制符号持续时间,fimod为第i个相干积分时间内信息速率本振频率;
84、然后利用相邻极性变化,通过和计算调制符号相位偏差即:
85、
86、最后利用无限长单位冲击响应数字滤波器对进行滤波处理,完成对信息速率本振频率的更新,即
87、
88、ω2=1.886×bloop
89、式中k为环路增益,bloop为环路带宽,ω2为振荡频率。
90、进一步地,在步骤s1中,包括子步骤:编码码率集合范围为{0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8},混沌随机过程采用logistic映射,量化器采用非线性量化方程:
91、
92、式中,量化值gi=j,q为码率集合样本数;
93、在步骤s2中,包括子步骤:调制集合为{2psk,4psk,8psk,16psk},采用步骤s1中的非线性量化方程,满足量化值pi=j,j=0,1...,q-1,q为调制集合样本数;
94、在步骤s3中,包括子步骤:采用步骤s1中的非线性量化方程,满足量化值zi=j,j=0,1...,q-1,q为跳码序列集合样本数;
95、在步骤s7中,包括子步骤:采用步骤s1中的非线性量化方程,满足量化值ci=j,j=0,1...,q-1,q为跳时集合样本数,跳时驻留时间为一个时隙时间长度;
96、在步骤s8中,包括子步骤:采用步骤s1中的非线性量化方程,满足量化值ri=j,j=0,1...,q-1,q为最优阵列集合样本数;
97、在步骤s9中,包括子步骤:采用步骤s1中的非线性量化方程,满足量化值pi=j,j=0,1...,q-1,q为频率集合样本数,频率驻留时间为一个时隙时间长度。
98、一种无人机抗控制抗截获通信波形生成装置,包括crc编码模块、turbo编码模块、速率匹配模块、随机调制模块、跳码扩频模块、随机相位旋转模块、随机码率生成模块、随机调制生成模块、跳码生成模块、随机相位生成模块、组帧模块、随机跳时模块、跳时生成模块、跳频模块、上变频模块、数模转换模块、阵列切换模块、阵元选择模块、延迟幅相加权模块和多阵元天线,且这些模块基于如上所述方法运行。
99、一种无人机抗控制抗截获通信波形接收装置,包括下变频模块、模数转换模块、带通滤波器、捕获模块、跟踪模块、解随机旋转模块、跳码解扩模块、基带解调模块、turbo译码模块、crc译码模块,且这些模块基于如上所述方法运行。
100、一种无人机抗控制抗截获通信系统,包括上所述的波形生成装置和波形接收装置。
101、本发明的有益效果包括:
102、(1)抗检测能力:本发明实施例技术方案根据最小化阵列副瓣电平准则、最小化目标方向失真准则和最大化非目标方向失真准则,构造最优阵列集合,通过随机过程控制阵列切换模块,从最优阵列集合中随机选取导通阵元并进行延迟幅相加权处理,通过电磁波干射效应,形成指向我方接收机的定向波束,在非合作方向形成低副瓣增益,降低空域暴露能量,减小第三方侦测平台检测性能。
103、(2)抗信号识别能力及抗解调能力:本发明实施例技术方案根据最小化阵列副瓣电平准则、最小化目标方向失真准则和最大化非目标方向失真准则,构造最优阵列集合,通过随机过程控制阵列切换模块,从最优阵列集合中随机选取导通阵元并进行延迟幅相加权处理,在保证我方接收机方向信号低失真度的情况下,最大化非合作方向失真度,使第三方侦测平台信号适应能力及信号识别性能降低。即使第三方侦测平台与我方接收机在相同方向,通过随机过程控制随机调制模块和随机相位旋转模块,以最大化辐射信号星座样式及不确定性,降低第三方侦测平台信号识别性能的同时,增加其对侦收信号正确解调的难度。
104、(3)抗参数测量能力:本发明实施例技术方案通过随机过程控制速率匹配模块,随机调制模块,跳码扩频模块,随机跳时模块和跳频模块,使调制符号速率、扩频码速率、扩频周期、辐射周期和载波频率动态变化,不具备循环平稳性,使第三方侦测平台无法通过长期观测实现对信号参数的稳定测量。
105、(4)业务信息速率和扩频速率设置灵活且抗多普勒能力强:本发明实施例技术方案业务信息速率与扩频速率的本振是非同源的,业务信息速率与扩频速率可以相互独立设置,增加了参数设计的灵活性。由于相对运动对两个本振频率引入的多普勒影响不同,业务信息和扩频码相位跳变存在不确定的关系,导致相干积分时间下码元与调制符号不同步,接收机无法正确解调。本发明采用载波环路、码环路和调制符号环路联动的方式,计算本地信号与接收信号的载波相位差、载波频率差、码相位差和调制符号相位差,经无限长单位冲击响应数字滤波器处理后依次调整接收机载波本振频率、扩频码速率本振频率和信息速率本振频率,完成对业务信号的载波相位同步、码元同步和调制符号同步,增强接收机抗多普勒的能力。
- 还没有人留言评论。精彩留言会获得点赞!