空域反转阵导向最小方差波束形成方法及装置与流程
本发明涉及水声阵列领域,具体涉及一种空域反转阵导向最小方差波束形成方法及装置。
背景技术:
1、对于被动水声阵列而言,阵列孔径越大则阵列性能越好。水声环境的时变空变、低信噪比等特点使得自适应波束形成成为目前水声阵列信号处理研究和应用最好的方法。但受尺寸和动力的限制,水下无人潜航器不能拖曳大孔径的水声线阵列,从而导致其阵列性能受到制约。如何提高水下无人潜航器小尺寸线阵列的性能成为目前研究的需求和热点。
2、自适应波束形成是利用一定的准则来设计阵列数据的权矢量来满足波束形成的要求,同时抑制干扰信号的噪声的方法。最小方差无畸变波束形成(minimum variancedistortionless response,mvdr)在阵列模型和接收数据的协方差矩阵确定时被证明是最优的,但在宽带水声条件下,当目标运动速度太快时,mvdr收敛所需快拍数量不能小于阵元数量,因此收敛时间长,导致对运动目标的方位估计存在偏差。导向最小方差(steeredminimum variance,stmv)波束形成通过多个频域子带的相干叠加,增大协方差矩阵的自由度,提高算法收敛速度,因此需要的时域快拍数量远少于mvdr,对于快速运动目标的方位谱估计效果更准确。
3、对于小尺寸阵列,阵列接收的数据相对于阵列的数量变得充沛,使得协方差矩阵获得更高的估计精确性。因此影响小尺寸阵列性能的因素就从接受数据协方差矩阵的误差转变为由于阵列孔径的减小导致的宽主瓣。主瓣宽度变宽会导致两个后果:一是造成阵列的多目标分辨性能下降;二会让强度高的目标成为强的干扰,导致附近相对弱的目标难以分辨。
4、为解决阵列孔径不足导致主瓣宽度变宽的问题,发展了阵列扩展技术。现有的阵列扩展主要有以下五种:1、四阶累积量法,四阶累积量在阵列扩展的基础上还能够抑制高斯噪声,但水面水下目标辐射的声信号并不符合四阶累积量法的条件,即信号的四阶累积量为零;2、内插变换法,其阵列扩展的原理是通过在特定的扫描子区域插值来拟合出实际阵元与虚拟阵元导向向量间的特定映射关系,缺点是当目标与变换区域的位置误差过大时会导致扩展阵列的波束形成出现零限漂移现象,即存在“角度敏感”问题;3、矩阵重构法,其利用某些阵列的特殊结构达到阵列扩展的目的,但不适用于水声线阵列。4、合成孔径法,其利用目标的时间相关性,只适用于目标信号存在线谱的情况,同样不适用于水声信号;5、互质阵法,需要两排阵列和特定的阵列间距。因此,现有的阵列扩展方法因为对目标特性和阵型的要求从而不适用于水下均匀线阵列的应用环境。
技术实现思路
1、本发明的目的是提出一种空域反转阵导向最小方差波束形成方法及装置,至少部分地解决现有技术中的问题。
2、为了实现上述发明目的,本发明采用如下的技术方案:
3、一种空域反转阵导向最小方差空间波束形成方法,包括以下步骤:
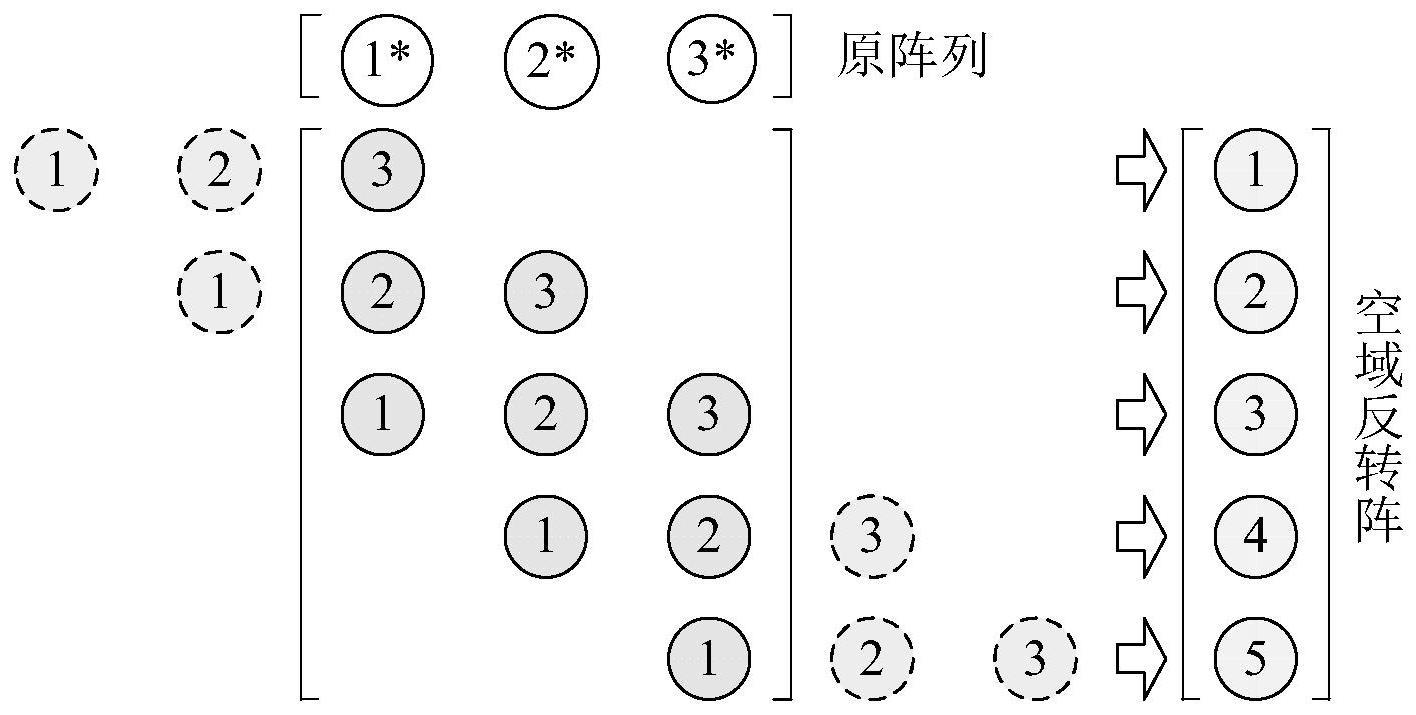
4、将原阵列快拍与自身进行空域反转过后的阵列快拍进行卷积,再将卷积后每个阵元的功率进行均衡,得到空域反转阵列的快拍;
5、获取空域反转阵的宽带阵列信号和方向向量,确定波束形成的协方差矩阵,基于协方差矩阵以及权向量根据stmv波束形成方法确定方位谱。
6、进一步地,所述空域反转阵列的快拍表示为:
7、
8、其中m为原阵列阵元数,n是空域反转阵中阵元的序号,n=-m+1,…m-1,表示原阵列中第m+(|n|-n)/2个阵元输出信号的共轭,x(m+(n+n)/2)(t)表示原阵列中第m+(|n|-n)/2个阵元输出的信号。
9、进一步地,获取空域反转阵的宽带阵列信号和方向向量,确定波束形成的协方差矩阵包括:
10、对空域反转阵列的快拍做傅里叶变换得到空域反转阵的宽带阵列信号xs(fj),根据阵型得到阵列的方向向量as(fj,θ),基于下式确定波束形成的协方差矩阵:
11、
12、其中:
13、
14、ra(fj)=e{xs(fj)xsh(fj)}
15、fj表示宽带信号带内第j个频点,j为宽带信号频点数,θ表示方向角。
16、进一步地,基于协方差矩阵以及权向量根据stmv波束形成方法确定方位谱包括:
17、基于协方差矩阵以及权向量将波束形成转换为如下问题:
18、
19、
20、其中表示权向量,1s是(2m-1)×1的1向量,表示寻找使标量最小时的方向角θ;
21、求解问题得到方向角θ,则有权向量为:方位谱为:
22、一种空域反转阵导向最小方差空间波束形成装置,包括
23、空域反转阵列构建模块,用于将原阵列快拍与自身进行空域反转过后的阵列快拍进行卷积,再将卷积后每个阵元的功率进行均衡,得到空域反转阵列的快拍;
24、波束形成处理模块,用于获取空域反转阵的宽带阵列信号和方向向量,确定波束形成的协方差矩阵,基于协方差矩阵以及权向量根据stmv波束形成方法确定方位谱。
25、进一步地,所述空域反转阵列构建模块得到的空域反转阵列的快拍表示为:
26、
27、其中m为原阵列阵元数,n是空域反转阵中阵元的序号,n=-m+1,…m-1,表示原阵列中第m+(|n|-n)/2个阵元输出信号的共轭,x(m+(|n|+n)/2)(t)表示原阵列中第m+(|n|-n)/2个阵元输出的信号。
28、进一步地,所述波束形成处理模块包括:第一处理模块,用于获取空域反转阵的宽带阵列信号和方向向量,确定波束形成的协方差矩阵,具体包括:
29、信号获取单元,用于对空域反转阵列的快拍做傅里叶变换得到空域反转阵的宽带阵列信号xs(fj),根据阵型得到阵列的方向向量as(fj,θ);
30、协方差矩阵确定单元,用于基于下式确定波束形成的协方差矩阵:
31、
32、其中:
33、
34、ra(fj)=e{xs(fj)xsh(fj)}
35、fj表示宽带信号带内第j个频点,j为宽带信号频点数,θ表示方向角。
36、进一步地,所述波束形成处理模块包括第二处理模块,用于基于协方差矩阵以及权向量根据stmv波束形成方法确定方位谱,具体包括:
37、问题构建单元,用于基于协方差矩阵以及权向量将波束形成转换为如下问题:
38、
39、
40、其中表示权向量,1s是(2m-1)×1的1向量,表示寻找使标量最小时的方向角θ;
41、问题求解单元,用于求解问题得到方向角θ,则有权向量为:
42、方位谱为:
43、本发明还提供一种计算机设备,包括:一个或多个处理器;存储器;以及一个或多个程序,其中所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述程序被处理器执行时实现如上所述的空域反转阵导向最小方差空间波束形成方法的步骤。
44、本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的空域反转阵导向最小方差空间波束形成方法的步骤。
45、相比于现有技术,本发明具有以下有益效果:
46、本发明通过将均匀线阵列的快拍空间反转,再与原阵列快拍卷积,得到孔径扩大近一倍的空域反转阵,并构造空域反转阵的导向向量,实现其导向最小方差波束形成,本发明称之为空域反转阵导向最小方差波束形成srva-stmv,即stmv beam-forming based onspatial reversal array。该方法对目标辐射信号的统计特征、频谱特征没有限制,并且对阵形没有特殊要求,适用于最普遍的均匀直线阵。同时也不存在“角度敏感”问题,可以广泛适用于水下均匀线阵的应用。
- 还没有人留言评论。精彩留言会获得点赞!