一种近距离激光通信跟踪中光斑精确定位的装置及方法与流程
1.本发明涉及激光通信领域,具体是一种近距离激光通信跟踪中光斑精确定位的装置及方法。
背景技术:
2.在近距离激光通信信标跟踪系统中,为了捕获对端发射的信标光,传统方式是采用某种策略进行机械扫描,采用一定焦距的镜头来探测信标光从而实现跟踪系统的对准,这使得系统的功能实现复杂、稳定性变差,并且在不同通信距离通信时,探测器成像会进入微离焦状态,距离远时光斑呈点源目标,光斑所能提供的像素和灰度信息也较少,容易造成光斑定位误差;而距离较近时,随着激光强度的增大,像素的灰度值逐渐增大至饱和,并向四周扩散,引起周围像素灰度值的变化,光斑会呈现面圆形或椭圆形,造成成像面上的光斑的非对称性,定位算法受到成像面光斑非均匀分布影响,如果采用某一固定的定位算法,不能保证在不同距离下对激光光斑的定位精度,进而对跟踪精度造成很大影响。
技术实现要素:
3.本发明的目的是针对现有技术的不足,而提供一种近距离激光通信跟踪中光斑精确定位的装置及方法。这种装置功能实现简单、系统工作稳定。这种方法能实现在不同通信距离下稳定、精准的跟踪。
4.实现本发明目的的技术方案是:
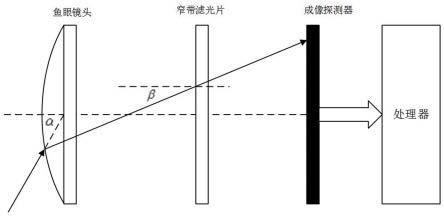
5.一种近距离激光通信跟踪中光斑精确定位的装置,包括顺序间隔设置的鱼眼镜头、窄带滤光片和成像探测器,成像探测器与处理器连接。
6.所述成像探测器采用cmos感光片。
7.鱼眼透镜具有超大视场,可覆盖半球空域;窄带滤光片滤除杂散光,降低虚警率,实现对特定波长的激光探测;成像探测器采用cmos感光片,响应灵敏度高,像元密度大,像元尺寸很小,为微米量级,结合亚像素定位算法可以实现激光源的精确定位。
8.本装置的工作原理为:光线穿过鱼眼镜头后,经窄带滤光片滤除杂散光,保留特定波长的光,成像探测器探测到特定波长的信标激光的成像光斑后,由处理器对图像进行直方图统计获得阈值,计算出光斑尺寸大小,再根据光斑大小判断是采用灰度重心法还是采用椭圆拟合法计算激光光斑中心位置,从而获得光斑重心与光轴的精确距离,完成定位。
9.一种近距离激光通信跟踪中光斑精确定位的方法,包括上述的近距离激光通信跟踪中光斑精确定位的装置,所述方法包括以下步骤:
10.1)读取光斑图像:处理器读取成像探测器探测到特定波长的信标激光的成像光斑;
11.2)直方图统计:处理器对成像光斑图像的0到255灰度等级进行统计,得到成像光斑图像的灰度值等级分布;
12.3)设置阈值:根据步骤2)的灰度直方图等级分布,采用二次大津自动阈值算法确
定阈值;
13.4)判断光斑大小:根据步骤3)得到的阈值对图像进行二值化,统计值为255的光斑的像素个数,以像素个数为单位,确定光斑大小,作为判断光斑大小的依据;
14.5)选择定位算法:根据光斑大小确定亚像素光斑定位算法,传统的方法是采用形心法或者灰度重心法,形心法先将图像二值化,只是简单地判断光斑的几何中心,形心法会丢失光斑分布的很多细节,如果光斑背景灰度值小、目标灰度值高,而且目标的灰度分布为抛物面或高斯曲面,判断光斑的中心可采用灰度重心法,灰度重心法是以灰度为权值的加权形心法,灰度重心法可以获得较高的定位精度,假设:
15.灰度图像i(i,j)中目标s的灰度重心如公式(1)所示:
[0016][0017]
其中,w(i,j)为权值,i,j分别为像素点横纵坐标值,s为目标区域,x0和y0为灰度重心,实际图像中目标特征的情况复杂时,例如亮背景和暗目标、目标和背景的灰度值都比较高,因此用灰度作为权重的灰度重心法的应用是有限的,这时可采用改进的权值选取方法即阈值灰度重心法判断光斑的中心,将权值w(i,j)定义为如公式(2)所示:
[0018][0019]
其中,t为区分目标和背景的阈值,i(i,j)为图像坐标(i,j)处的像素灰度值;
[0020]
当目标的特征是圆或椭圆时,采用椭圆拟合法确定光斑中心位置即对提取的目标边界的一组点进行椭圆最小二乘拟合,在椭圆拟合之前需对目标边缘信息进行提取,目前常用的边缘检测算子有sobel算子、roberts算子、prewitt算子等,roberts算子是一种利用局部差分算子寻找边缘的算子,对于低噪声图像效果较好,提取效果确实优于其它微分算子,而实验图像为均匀低背景下的激光光斑图像,本技术方案采用roberts算子对光斑图像进行边缘提取,roberts算子定义如公式(3)所示:
[0021][0022]
其中,g为边缘点,f为像素点,i,j分别为像素的横、纵坐标,由于roberts算子算法的处理工作量很大,在此采用绝对差算法对公式(3)化简为公式(4)所示:
[0023]
g[f(i,j)]=|f(i+1,j+1)-f(i,j)|+|f(i,j+1)-f(i+1,j)|
ꢀꢀ
(4),其中,g为边缘点,f为像素点,i,j分别为像素的横、纵坐标,roberts梯度以[i-0.5,j-0.5]为中心,所以它度量了[i-0.5,j-0.5]点处45
°
和135
°
方向即相互正交的灰度变化,根据步骤3)确定阈值t,g[f(i,j)]>t为阶跃状边缘点,在对光斑边缘信息获取的基础上,再拟合计算得到光斑的亚像素位置中心坐标,基于椭圆拟合的激光光斑中心位置确定是依据最小二乘原理即残差平方和最小用椭圆来逼近激光光斑轮廓实现,椭圆方程的一般方程如公式(5)所示:
[0024]
ax2+bxy+cy2+dx+ey+1=0
ꢀꢀꢀꢀꢀꢀ
(5),
[0025]
其中,a,b,c,d,e为常量,x,y为激光光斑边缘坐标点,残差平方和函数为公式(6)所示:
[0026][0027]
其中,a,b,c,d,e为常量,n为边缘像素点数,(xi,yi)为激光光斑边缘坐标点,q为残差平方和值,
[0028]
根据最小二乘原理,应有:
[0029][0030]
由此可以得到包含5个方程和5个未知数的方程组,如下:
[0031][0032]
通过求解方程组便可以得到a,b,c,d,e五个常量参数的值,进而求出椭圆中心坐标,即:
[0033][0034][0035]
6)最后得到光斑中心位置,完成定位。
[0036]
本技术方案采用大视角的鱼眼镜头,对目标进行凝视探测,并引入阈值灰度重心法和椭圆拟合法相综合的亚像素激光光斑定位算法,降低了接收激光光斑在微离焦工作状态下的定位误差,并克服了机械扫描带来的复杂性和不稳定性,保证跟踪系统在不同通信距离下具有稳定的跟踪精度。
[0037]
这种装置功能实现简单、系统工作稳定。这种方法能实现在不同通信距离下稳定、精准的跟踪。
附图说明
[0038]
图1为实施例的装置结构图示意图;
[0039]
图2为实施例的方法流程示意图;
[0040]
图3实施例中激光光斑定位测试平台示意图。
具体实施方式
[0041]
下面结合附图和实施例对本发明的内容做进一步的详细说明,但不是对本发明的限定。
[0042]
实施例:
[0043]
一种近距离激光通信跟踪中光斑精确定位的装置,如图1所示,包括顺序间隔设置的鱼眼镜头、窄带滤光片和成像探测器,成像探测器与处理器连接。
[0044]
所述成像探测器采用cmos感光片。
[0045]
鱼眼透镜具有超大视场,可覆盖半球空域;窄带滤光片滤除杂散光,降低虚警率,实现对特定波长的激光探测;成像探测器采用cmos感光片,响应灵敏度高,像元密度大,像元尺寸很小,为微米量级,结合亚像素定位算法可以实现激光源的精确定位。
[0046]
本例装置的工作原理为:光线穿过鱼眼镜头后,经窄带滤光片滤除杂散光,保留特定波长的光,成像探测器探测到特定波长的信标激光的成像光斑后,由处理器对图像进行直方图统计获得阈值,计算出光斑尺寸大小,再根据光斑大小判断是采用灰度重心法还是采用椭圆拟合法计算激光光斑中心位置,从而获得光斑重心与光轴的精确距离,完成定位。
[0047]
一种近距离激光通信跟踪中光斑精确定位的方法,包括上述的近距离激光通信跟踪中光斑精确定位的装置,如图2所示,所述方法包括以下步骤:
[0048]
1)读取光斑图像:处理器读取成像探测器探测到特定波长的信标激光的成像光斑;
[0049]
2)直方图统计:处理器对成像光斑图像的0到255灰度等级进行统计,得到成像光斑图像的灰度值等级分布;
[0050]
3)设置阈值:根据步骤2)的灰度直方图等级分布,采用二次大津自动阈值算法确定阈值;
[0051]
4)判断光斑大小:根据步骤3)得到的阈值对图像进行二值化,统计值为255的光斑的像素个数,以像素个数为单位,确定光斑大小,作为判断光斑大小的依据;
[0052]
5)选择定位算法:根据光斑大小确定亚像素光斑定位算法,传统的方法是采用形心法或者灰度重心法,形心法先将图像二值化,只是简单地判断光斑的几何中心,形心法会丢失光斑分布的很多细节,如果光斑背景灰度值小、目标灰度值高,而且目标的灰度分布为抛物面或高斯曲面,判断光斑的中心可采用灰度重心法,灰度重心法是以灰度为权值的加权形心法,灰度重心法可以获得较高的定位精度,假设:
[0053]
灰度图像i(i,j)中目标s的灰度重心如公式(1)所示:
[0054][0055]
其中,w(i,j)为权值,i,j分别为像素点横纵坐标值,s为目标区域,x0和y0为灰度重心,实际图像中目标特征的情况复杂时,例如亮背景和暗目标、目标和背景的灰度值都比较高,因此用灰度作为权重的灰度重心法的应用是有限的,这时可采用改进的权值选取方法即阈值灰度重心法判断光斑的中心,将权值w(i,j)定义为如公式(2)所示:
[0056][0057]
其中,t为区分目标和背景的阈值,i(i,j)为图像坐标(i,j)处的像素灰度值;
[0058]
当目标的特征是圆或椭圆时,采用椭圆拟合法确定光斑中心位置即对提取的目标边界的一组点进行椭圆最小二乘拟合,在椭圆拟合之前需对目标边缘信息进行提取,目前常用的边缘检测算子有sobel算子、roberts算子、prewitt算子等,roberts算子是一种利用局部差分算子寻找边缘的算子,对于低噪声图像效果较好,提取效果确实优于其它微分算子,而实验图像为均匀低背景下的激光光斑图像,本例采用roberts算子对光斑图像进行边缘提取,roberts算子定义如公式(3)所示:
[0059][0060]
其中,g为边缘点,f为像素点,i,j分别为像素的横、纵坐标,由于roberts算子算法的处理工作量很大,在此采用绝对差算法对公式(3)化简为公式(4)所示:
[0061]
g[f(i,j)]=|f(i+1,j+1)-f(i,j)|+|f(i,j+1)-f(i+1,j)|
ꢀꢀ
(4),其中,g为边缘点,f为像素点,i,j分别为像素的横、纵坐标,roberts梯度以[i-0.5,j-0.5]为中心,所以它度量了[i-0.5,j-0.5]点处45
°
和135
°
方向即相互正交的灰度变化,根据步骤3)确定阈值t,g[f(i,j)]>t为阶跃状边缘点,在对光斑边缘信息获取的基础上,再拟合计算得到光斑的亚像素位置中心坐标,基于椭圆拟合的激光光斑中心位置确定是依据最小二乘原理即残差平方和最小用椭圆来逼近激光光斑轮廓实现,椭圆方程的一般方程如公式(5)所示:
[0062]
ax2+bxy+cy2+dx+ey+1=0
ꢀꢀꢀꢀꢀꢀ
(5),
[0063]
其中,a,b,c,d,e为常量,x,y为激光光斑边缘坐标点,残差平方和函数为公式(6)所示:
[0064][0065]
其中,a,b,c,d,e为常量,n为边缘像素点数,(xi,yi)为激光光斑边缘坐标点,q为残差平方和值,
[0066]
根据最小二乘原理,应有:
[0067][0068]
由此可以得到包含5个方程和5个未知数的方程组,如下:
[0069][0070]
通过求解方程组便可以得到a,b,c,d,e五个常量参数的值,进而求出椭圆中心坐标,即:
[0071][0072][0073]
6)最后得到光斑中心位置,完成定位。
[0074]
为验证本例装置和方法的可行性,在实验室条件下,组建激光光斑定位测试平台,如图3所示,包括顺序间隔设置的940nm波长的激光器、衰减系统、扩束准直系统、500万像素鱼眼镜头(型号an1720m-5mp)、940nm波长窄带滤光片和openmv成像探测器,成像探测器与处理器连接,固定激光器和激光探测系统的相对位置,通过调节衰减系统的衰减倍率和扩束准直系统控制进入鱼眼镜头的光通量,得到不同大小光斑的八幅图像(对同一光斑图像各采集十幅);
[0075]
对采集到的激光光斑图像分别采用阈值灰度重心法和椭圆拟合法进行光斑中心定位,表1是激光光斑定位结果,表l给出了定位后光斑中心横坐标值(纵坐标情况类似)及其对应的标准差值,其中坐标值为对十幅相同光斑图像进行定位的坐标均值,对表中数据分析如下:
[0076]
(1)当光斑较小时,由于光斑信息较少,边缘提取无法获取足够的信息,使得椭圆拟合法不能完成精确定位,但此时灰度重心法具有较高的定位精度,经反复实验验证,当光斑小于9个像素时,灰度重心法的光斑定位标准差在0.15个像素以下,而此时椭圆拟合法失效;
[0077]
(2)随着光斑的增大,椭圆拟合法的优势逐渐显现出来,当t≥9时,通过椭圆拟合法确定的光斑中心标准差很小,均在0.15个像素以下,而此时由灰度重心法定位精度降低;
[0078]
(3)分析原因:当光斑较小时,激光光斑形状特征不明显,灰度重心法是基于灰度加权的定位方法,此时参与加权计算的像素较少,引入的误差因素也相应减少,定位精度较高;当光斑较大时,激光光斑形状凸显出来,椭圆拟合法通过提取光斑边缘信息完成中心定位,有较高的定位精度;而此时灰度重心法参与加权计算的像素增多,但由于光斑灰度分布不均匀等因素使定位精度下降。
[0079]
本例结合激光探测系统的成像特点,在分析成像光斑特点和实验的基础上,验证了灰度重心法和椭圆拟合法的各自特点:灰度重心法在光斑较小时具有很高的定位精度,而椭圆拟合法在光斑较大时定位精度较理想,鉴于此,针对不同大小的光斑分别使用灰度重心法和椭圆拟合法的综合定位方法,可以有效保证光斑定位精度,使其控制在0.15个像素以内。
[0080]
表1:
[0081]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1