基于无线传输的边坡分阶段组合监测的方法
本发明属于边坡监测,涉及一种基于无线传输的边坡分阶段组合监测的方法。
背景技术:
1、对边坡进行时效和准确的监测是我们进行边坡稳定性分析的关键步骤。
2、我国地质结构复杂,地貌类型繁多,地形起伏较大,进而对边坡的监测带来了很大的挑战。同时,传统的监测技术缺陷较多,具体体现为需要人工来进行数据的采集,工作量大,而且我国大量的边坡变形失稳过程多发生在山区,多伴有暴雨和地震等恶劣气候,因而当我们人工监测时,容易发生安全事故,同时效率较低,得到的数据也多不准确。例如对地表变形常采用的大地测量法所使用的光学仪器易受环境气候和地形条件的影响、对深部变形的监测常采用钻孔测斜法所采用的钻孔测斜仪等仪器和设备的成本较高,同时监测周期长。
3、因而,为解决这些问题,国内外研究趋势已经向对自动化、远程监控、高精度、低成本等方面发展。涌现出一批新型监控技术,如全球定位系统(gps)、遥感技术(rs)、地理信息系统(gis),通称为“3s”技术、地面激光扫描仪技术、合成孔径雷达干涉测量技术、数字近景摄影测量技术、分布式光纤传感技术、ae技术、insar技术、测量机器人和tdr技术等。
4、tdr技术又成为为时域反射法是一种用于测量电缆变形程度和变形位置的电测量技术,早期主要应用于通信行业;测量机器人是在全站仪基础上改进的能够代替人类进行搜索、跟踪、辨识并能精准获得距离、角度、三维坐标及影像信息的测量计算。
技术实现思路
1、为解决边坡监测问题,采用传统的人工监测方法不仅会使监测人员面临施工和监测过程中的危险,而且效率不高,数据不准确且数据收发不具有实时性,同时受恶劣天气和环境的影响较大,监测工程施工过程复杂,工期较长,人力物力消耗大,成本较高,单一的监测方法也是如此。因此本技术提出一种基于无线传输的边坡分阶段组合监测的方法,在解决上述问题的同时又解决了传统监测方式的数据采集、传输、处理分析方式的局限性;并采用可移动式升降台装置调节测量机器人的通视条件和布设似矩形全方位监测网,解决了选点布点难和监测网覆盖面不全的问题;同时tdr同轴电缆的安装方式,解决了传统监测方式不能及时判断加固工程效果的问题,也一定程度解决了工期紧的问题。
2、本发明采用的技术方案如下:
3、基于无线传输的边坡分阶段组合监测的方法,其步骤和方法如下:
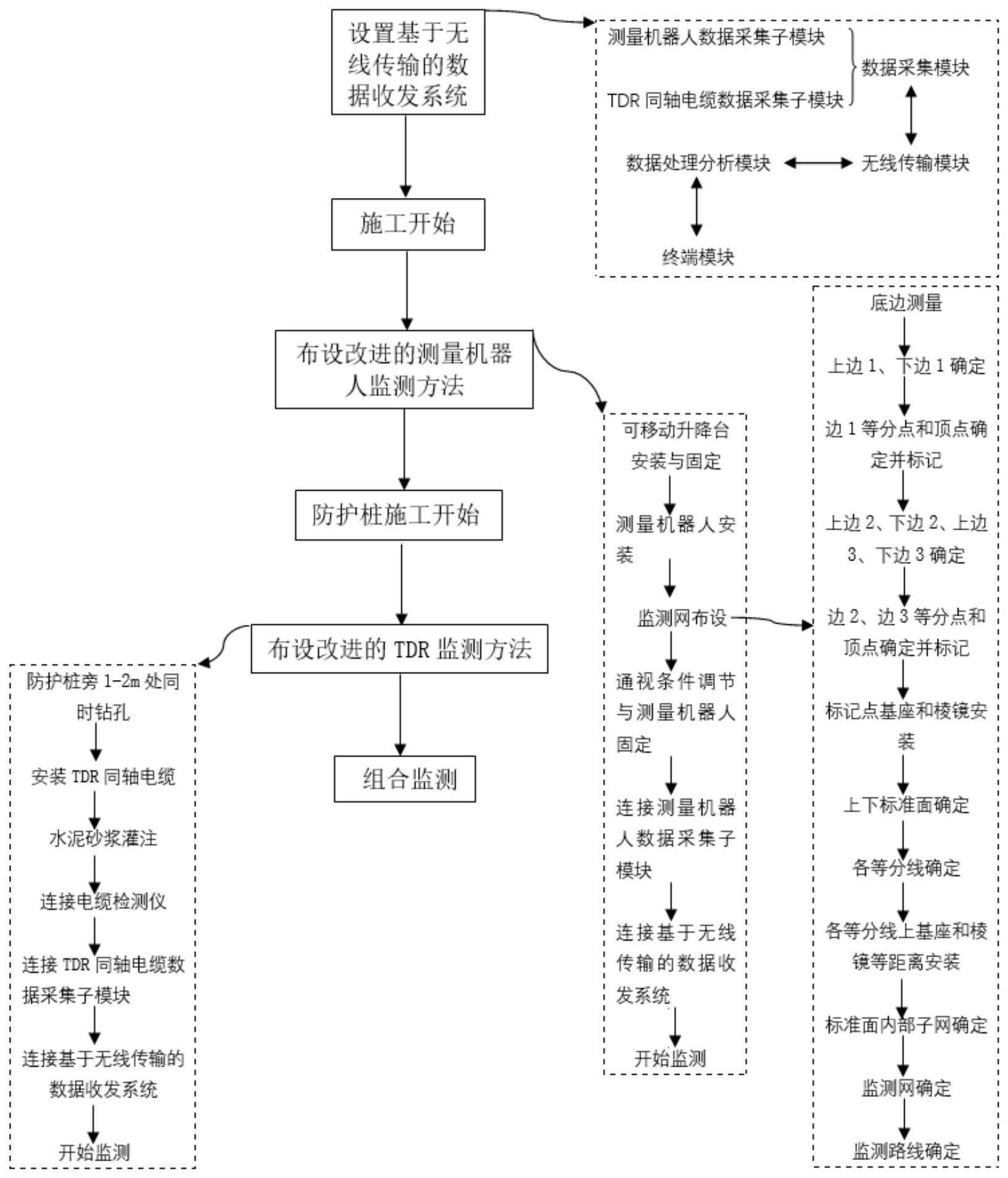
4、首先设置一套完整的、改进的测量机器人监测方法和改进的tdr监测方法共用的基于无线传输的数据收发系统;
5、所述改进的测量机器人监测方法是指通过设置简易装置调节全自动全站仪的通视条件来进行边坡表面似矩形监测网上的目标棱镜的搜寻,自带数据储存系统自动收集、记录监测数据,进而连接基于无线传输的数据收发系统进行监测数据收发,从而实现边坡位移的全方面监测的方法;
6、所述改进的tdr监测方法是一种远程的电子测量方法,通过将tdr同轴电缆埋设距防护桩1m-2m处并与防护桩施工同步进行,tdr同轴电缆作为传感器,同轴电缆测试仪发送电脉冲并将整个同轴电缆长度的相对阻抗变化数据测读和记录下来,之后配备多路复用器,对多点进行同时监测,进而连接基于无线传输的数据收发系统进行监测数据收发,从而实现边坡位移的全方面监测的方法;
7、所述基于无线传输的数据收发系统包括数据采集模块、无线传输模块、数据处理分析模块、终端模块;
8、所述数据采集模块包括改进的测量机器人数据采集子模块和tdr同轴电缆数据采集子模块;
9、所述改进的测量机器人监测方法数据采集子模块和tdr同轴电缆数据采集子模块是指改进的测量机器人数据采集子模块与改进的测量机器人数据储存系统单独有线连接、tdr同轴电缆数据采集子模块与同轴电缆检测仪单独有线连接,待改进的测量机器人监测方法和tdr监测方法开始工作时,自动进行数据采集,并以数据采集模块整体储存;
10、所述无线传输模块是指与数据采集模块和数据处理分析模块双向连接,用以数据的无线、实时、远程、精确收发。
11、所述数据处理分析模块是指与无线传输模块和终端模块双向连接,用来处理分析数据采集模块经无线传输模块传输至此的数据和相关图像;进一步将处理、分析后的数据和相关图像传输至终端模块;
12、所述数据处理分析模块进行数据和相关图像的处理分析是指对用以判断地表位移、变形的三维坐标数据及相关图像和用以判断地下位移、变形的同轴电缆的变形数据及相关图像,进行归类、对比、分析后,在短时间内准确输出数据报表和相应的位移、变形图;
13、所述地表位移主要包括水平位移、竖直位移和裂缝,地下位移、变形主要包括滑动面深度,主滑方向;
14、所述终端模块是指与数据处理分析模块连接用以接收数据处理分析模块传来的各种处理、分析后的数据和相关图像,将各类直观的数据报表和具体的边坡位移、变形图形呈现给观测人员;
15、2)进一步根据边坡各施工阶段特点进行运用改进的测量机器人监测方法和改进的tdr监测方法进行边坡分阶段组合监测的阶段规划与相关布设。施工开始至防护桩施工开始时,采用改进的测量机器人监测方法作为主要监测手段,并对改进的测量机器人监测方法进行相关布设;待防护桩施工开始时介入改进的tdr监测方法,并对tdr监测方法进行相关布设;进一步进行改进的测量机器人监测方法和tdr监测方法组合监测;
16、所述对测量机器人监测方法进行相关布设是指在坡顶和坡底选择较为平整地段安装并固定可移动式升降台装置;进一步在其上安装测量机器人;进一步布设测点,形成全方位观测网;进一步调整测量机器人位置,使其能搜寻到每一个测点并将测量机器人固定;进一步连接基于无线传输的数据收发系统;
17、所述对tdr监测方法进行相关布设是指待进行防护桩施工钻孔时,在防护桩旁1m-2m处同步钻孔;进一步安装tdr同轴电缆;进一步进行水泥砂浆灌注,紧密结合周围岩土和tdr同轴电缆;进一步连接电缆检测仪;进一步连接基于无线传输的数据收发系统。
18、进一步地,基于无线传输的数据收发系统的数据采集模块、无线传输模块、数据处理分析模块、终端模块均是内置可更换充电电池,无需供电设备,所述终端模块可以是计算机端和手机端。
19、进一步地,所述无线传输模可以是5g无线模块、4g无线模块或wi-fi无线模块。
20、进一步地,可移动式升降台装置,由半圆形轨道和升降台组成,所述可移动式升降台装置,由半圆形轨道和升降台组成;所述半圆形轨道,内半轨和外半轨组成,在内外半轨中线上按等距离设置螺栓帽,实现升降台的移动与固定;所述升降台为手动升降台,升降台底部两侧设有对称滚轴、中间设有螺栓孔,安装于半圆轨道之上,台面设置测量机器人固定螺栓,实现测量机器人的固定。
21、进一步地,改进的测量机器人监测方法实现边坡位移的全方面监测是指所采用的测量机器人为具有高精度和坚固耐用的tm30测量机器人,在坡顶和坡底分别安装一台于可移动式升降台之上作为两个基准点,命名为j01、j02;进一步同时进行自上而下和自下而上成正三角形式对称布设普通圆形棱镜作为观测点,整体构成类似矩形全方位监测网;进一步利用tm30测量机器人的高精度空间定位技术确定其基准点和坐标;进一步将测量机器人数据储存系统单独有线连接于测量机器人数据采集子模块;进一步通过手动设置参数控制tm30测量机器人对每个监测点进行5-10次自动巡回观测,得出三维观测数据并得到相应图像;进一步将数据和相应图像转存至单独连接的测量机器人数据采集子模块;进一步完成后续数据收发与监控。
22、进一步地,改进的tdr监测方法实现边坡位移的全方面监测,指首先需要待边坡防护桩施工钻孔时在距防护桩1m-2m处位置同时钻孔,并将tdr同轴电缆安放在钻孔中,进一步将tdr同轴电缆与电缆测试仪相连,电缆测试仪作为信号源,发出步进的电压脉冲通过电缆进行传输,同时反映从电缆中反射回来的脉冲信号;进一步将tdr同轴电缆数据采集子模块连接到电缆测试仪之上,对电缆测试仪起控制作用,记录和存储从电缆中反射回来的脉冲信号;进一步配备多路复用器,以对多点进行同时监测;进一步完成后续数据收发和监测。
23、进一步地,整体构成类似矩形监测网是指,首先分别大致测出坡顶和坡底横向宽度,作为上下两等边三角形的底边,记为上边1、下边1;进一步将两底边按1m-1.5m等距离划分为n段,形成n-1个等分点和两顶点;进一步将n-1个等分点和两顶点作为棱镜安放点并标记;进一步以上下等边三角形两底边为基准确定另外四条边位置,记为上边2、下边2、上边3、下边3,并与两底边同方法划分和标记;进一步将带有螺纹孔的棱镜基座依次固定在标记点位置;进一步将带有螺丝的普通圆形棱镜依次安装于基座之上;进一步由上下边1、边2、边3组成两个大等边三角形监测网,两者结合整体近似为矩形,作为两个标准面;进一步根据边坡特点,在边坡易失稳部位进行上、下标准面边2和边3上一等分点、二等分点、三等分点……n-1等分点连线上的棱镜的等距离布置,形成上下标准面内部小等边三角形子网;进一步把上、下边1的两顶点任意一点作为测量机器人巡回观测的起点;进一步自起点开始依次命名为g01、g02、g03……gn2-n;进一步形成坡顶和坡底测量机器人绕标准面边1及边2和边3一等分点、二等分点、三等分点……n-1等分点的连线,成s型路线搜寻棱镜的整体全方位类似矩形监测网。
24、进一步地,测量机器人对每个监测点进行5-10次自动巡回观测所采集的三维观测数据和相应图像是指测量机器人进行5-10次自动巡回观测时各个固定监测点每次的三维坐标和相应的位移、变形图像;所述完成后续数据收发与监控是指测量机器人数据采集子模块采集和储存上述三维坐标和相应位移、变形图像,其中三维坐标记为m1,m2,m3…mn;进一步将采集和储存的三维坐标和相应位移、变形图像经无线传输模块传输至数据处理分析模块,经数据处理分析模块处理、分析后,得到两两差值作为观测点的变形量,记为δ1=m2-m1,δ2=m3-m2,…δn=mn-mn-1,并归类出具体位移、变形图;进一步将处理、分析后的直观数据报表和具体位移、变形图传输至终端模块,用以监测地表位移、变形发展状况,主要包括水平位移、竖直位移监测和裂缝监测。
25、进一步地,记录和存储从电缆中反射回来的脉冲信号,进一步完成后续数据收发和监测是指同轴电缆由于边坡失稳发生扭曲、弯折、断开等变形时,特征阻抗会因此发生变化,电脉冲信号也会因此发生反射并产生一个反射信号,当tdr测试仪接收到反射信号以后,将发射信号与反射信号的延时、波长、范围和强度的数据以及相关图像转存至tdr同轴电缆数据采集子模块;进一步将上述数据经无线传输模块传输至数据处理分析模块;进一步数据处理分析模块对经无线传输模块传输至此的数据进行分析、对比,归类得到清晰的位移及变形图和数据报表;进一步将位移及变形图和数据报表传输至终端模块;进一步判断同轴电缆发生变形的位置以及变形类型,从而判断整个区域的边坡土体是否会发生变形,主要监测相对于稳定地层的地下位移,证实和确定正在发生位移的构造特征,确定潜在滑动面深度,判断主滑动面深度,判断主滑方向,判断边坡加固工程效果。
26、进一步地,前期未进行加固工程防护桩施工时主要应用改进的测量机器人监测方法进行监测,测量机器人经测量机器人数据采集子模块单独连接基于无线传输的数据收发系统,tdr数据采集子模块不工作,待边坡防护桩开始施工时介入tdr监测方法,经tdr数据采集子模块连接基于无线传输的数据收发系统。
27、本发明的有益效果:
28、发明一种基于无线传输的数据收发系统,有效的解决了不同监测方式组合监测时数据的收发问题、保证了数据的精确性与时效性,实现了无线远程传输,使得监测结果以直观的报表和图形呈现给观测人员,减少了监测人员工作量;同时采用分阶段组合监测,在初期未进行加固工程防护桩施工时,采用改进的测量机器人监测方法进行监测,可以保证施工过程和监测过程的安全,同时采用自上而下和自下而上同时正三角形式对称布置观测点,不仅设计与后期数据处理简单,形成的监测网对边坡的覆盖面较广,而且有效地减少棱镜的使用数量,节约成本;同时安装简易可移动式升降台装置调节测量机器人的通视条件,解决选点难问题;待防护桩成孔施工时,距其1m-2m处同步钻孔安装tdr同轴电缆,介入改进的tdr监测方法,自此两者组合监测,简化施工步骤,缩短工期,对防护桩施工也有一定的监测效果,从而能够较为及时的判断加固工程效果,并整治;同时采用改进的tdr监测方法和改进的测量机器人监测方法组合监测,结合两者的优缺点,相互弥补,解决受恶劣天气和气候影响较大的监测问题,自动化程度较高,能实现24小时无人观测,保证了施工过程和监测过程的安全,也有效的节约成本。
- 还没有人留言评论。精彩留言会获得点赞!