信号跟踪方法、调制解调器及时间同步系统与流程
本发明涉及高精度时间同步,尤其涉及一种信号跟踪方法、调制解调器及时间同步系统。
背景技术:
1、随着科技学术的发展,各行各业对时间的精度要求越来越高,时间服务成为一个国家发展的重要基石,高精度时间同步是实现时间服务的关键,在时间计量、导航定位、航天测控、通信雷达等领域都有着非常重要的应用价值。目前,在无人机编队、车载等系统中,高精度时间同步是系统正常工作的基本保障。但是在这些系统中,无人机、车辆等常常处于高动态场景下,因此,时间同步系统也需要工作在高动态平台下。当时间同步系统在高动态时,时间同步精度会大大降低。目前的时间同步主要工作静态场景,针对高动态场景设计的时间同步系统还非常少。
2、为了提高时间同步系统在机载、车载等高动态平台下的性能,亟需提高时间同步系统在高动态场景下的性能。时间同步技术包含单向时间传递技术和双向时间传递技术,而双向时间传递因为其传播路径对称,同步精度高,目前主要使用该技术进行高精度时间同步。双向时间同步系统中,调制解调器是核心组成部分,直接决定了时间同步精度。而跟踪环路是调制解调器的重要部分,目前跟踪环路在高动态场景下很容易失锁。针对上述的问题,尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种信号跟踪方法、调制解调器及时间同步系统,以至少解决高动态场景下跟踪环路鲁棒性差、跟踪精度低的技术问题。
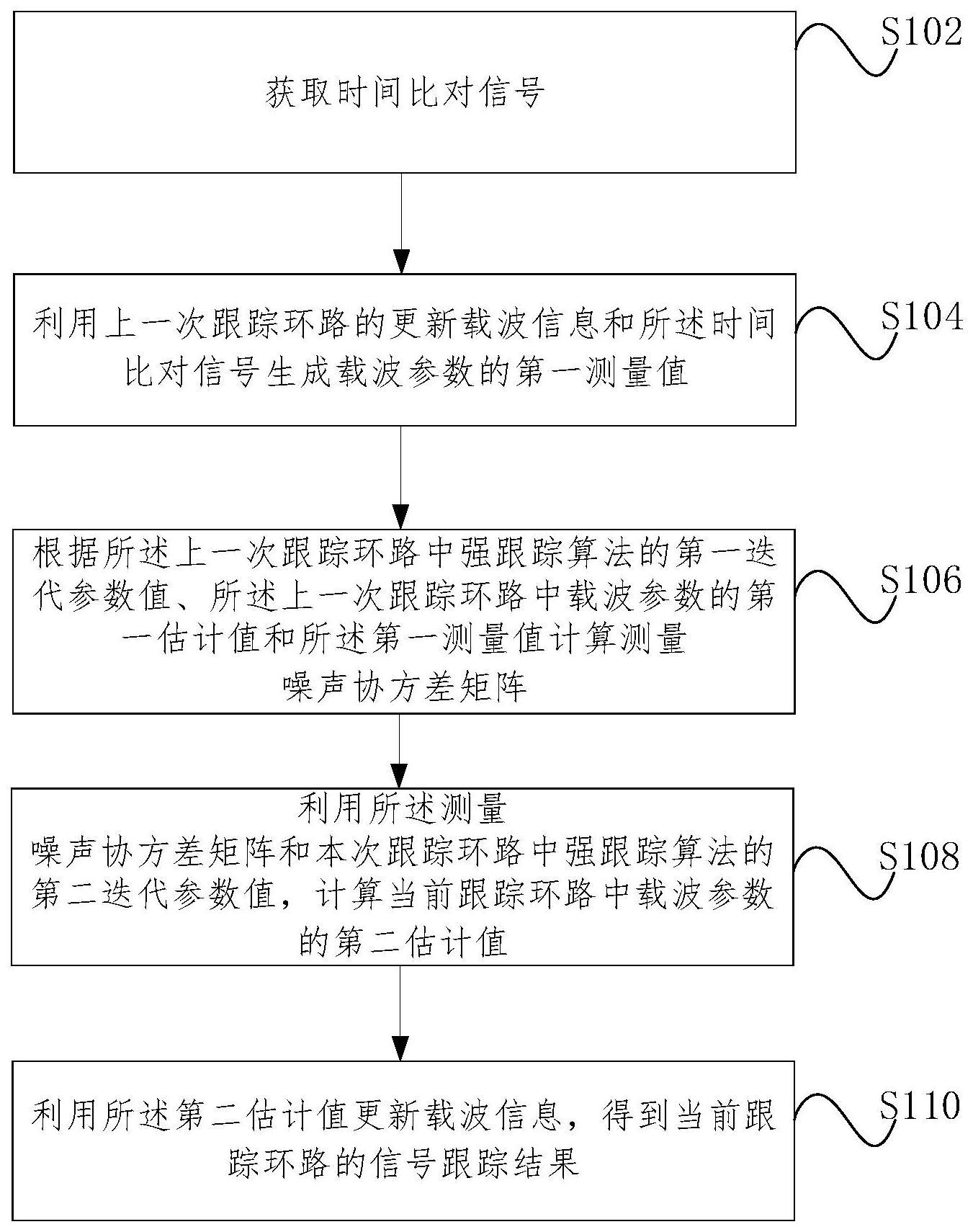
2、根据本发明实施例的一个方面,提供了一种信号跟踪方法,包括:获取时间比对信号;利用上一次跟踪环路的更新载波信息和所述时间比对信号生成载波参数的第一测量值;根据所述上一次跟踪环路中强跟踪算法的第一迭代参数值、所述上一次跟踪环路中载波参数的第一估计值和所述第一测量值计算测量噪声协方差矩阵;利用所述测量噪声协方差矩阵和本次跟踪环路中强跟踪算法的第二迭代参数值,计算当前跟踪环路中载波参数的第二估计值;利用所述第二估计值更新载波信息,得到当前跟踪环路的信号跟踪结果。
3、可选地,所述载波参数至少包括载波相位误差参数、载波多普勒偏移参数和载波多普勒变化率参数。
4、可选地,利用上一次跟踪环路的更新载波信息和所述时间比对信号生成载波参数的第一测量值,包括:生成伪码信息;利用上一次跟踪环路的更新载波信息和所述伪码信息解调时间比对信号,得到解调结果;滤除所述解调结果中的目标频率信息,得到积分结果;利用所述积分结果计算载波相位误差,得到载波参数的第一测量值。
5、可选地,根据所述上一次跟踪环路中强跟踪算法的第一迭代参数值、所述上一次跟踪环路中载波参数的第一估计值和所述第一测量值计算测量噪声协方差矩阵,包括:获取上一次变分贝叶斯迭代中所述测量噪声协方差矩阵的第一自由度数目和第一逆尺度矩阵;利用所述第一自由度数目计算本次变分贝叶斯迭代中所述测量噪声协方差矩阵的第二自由度数目;利用所述第一逆尺度矩阵、所述第一迭代参数值、所述第一估计值和所述第一测量值计算本次变分贝叶斯迭代中所述测量噪声协方差矩阵的第二逆尺度矩阵;利用所述第二自由度数目、所述第二逆尺度矩阵和所述第一测量值的维度值计算测量噪声协方差矩阵。
6、可选地,按照如下公式计算测量噪声协方差矩阵:
7、
8、
9、
10、
11、其中,表示自由度数目,表示逆尺度矩阵,i表示变分迭代次数,k表示stkf迭代次数,zk表示k时刻的测量矢量,h代表测量矩阵,表示k时刻状态变量,pk为估计的状态协方差矩阵,m表示测量值向量的维度,表示测量噪声协方差矩阵。
12、可选地,利用所述测量噪声协方差矩阵和本次跟踪环路中强跟踪算法的第二迭代参数值,计算当前跟踪环路中载波参数的第二估计值,包括:利用所述测量噪声协方差矩阵计算渐消因子;利用所述渐消因子和所述第二迭代参数值计算预测状态协方差矩阵;利用所述预测状态协方差矩阵计算当前跟踪环路中载波参数的第二估计值。
13、可选地,按照如下公式计算渐消因子:
14、λk=diag(λ1,k,λ2,k…,λn,k)
15、
16、
17、
18、
19、
20、其中,λk表示渐消因子,σi是预先定义的常数,tr[·]表示求矩阵的迹,vk表示估计的新息协方差矩阵,rk代表测量噪声协方差矩阵,h代表测量矩阵,qk-1为系统噪声协方差,φ代表系统转移矩阵,为估计的状态协方差矩阵,ρ为遗忘因子,d表示新息序列。
21、可选地,按照如下公式计算预测状态协方差矩阵:
22、
23、其中,为预测状态协方差矩阵,λk表示渐消因子,φ代表系统转移矩阵,为估计的状态协方差矩阵,qk-1为系统噪声协方差。
24、根据本发明实施例的另一个方面,还提供了一种调制解调器,包括:处理器;用于存储处理器可执行指令的存储器;其中,所述处理器被配置为执行上述的信号跟踪方法。
25、根据本发明实施例的另一个方面,还提供了一种时间同步系统,包括上述的调制解调器。
26、在本发明实施例中,获取时间比对信号;利用上一次跟踪环路的更新载波信息和所述时间比对信号生成载波参数的第一测量值;根据所述上一次跟踪环路中强跟踪算法的第一迭代参数值、所述上一次跟踪环路中载波参数的第一估计值和所述第一测量值计算测量噪声协方差矩阵;利用所述测量噪声协方差矩阵和本次跟踪环路中强跟踪算法的第二迭代参数值,计算当前跟踪环路中载波参数的第二估计值;利用所述第二估计值更新载波信息,得到当前跟踪环路的信号跟踪结果。本发明实施例在每一次跟踪环路中可以自适应调整测量噪声协方差矩阵,基于调整后的测量噪声协方差矩阵进行计算,可以提高跟踪环路的强跟踪算法中载波参数的第二估计值的准确度,从而提高跟踪环路的信号跟踪结果的准确度,进而有效提高时间比对调制解调器中跟踪环路在高动态环境下的鲁棒性和准确度。
技术特征:
1.一种信号跟踪方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述载波参数至少包括载波相位误差参数、载波多普勒偏移参数和载波多普勒变化率参数。
3.根据权利要求1所述的方法,其特征在于,利用上一次跟踪环路的更新载波信息和所述时间比对信号生成载波参数的第一测量值,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述上一次跟踪环路中强跟踪算法的第一迭代参数值、所述上一次跟踪环路中载波参数的第一估计值和所述第一测量值计算测量噪声协方差矩阵,包括:
5.根据权利要求4所述的方法,其特征在于,包括:按照如下公式计算测量噪声协方差矩阵:
6.根据权利要求1所述的方法,其特征在于,利用所述测量噪声协方差矩阵和本次跟踪环路中强跟踪算法的第二迭代参数值,计算当前跟踪环路中载波参数的第二估计值,包括:
7.根据权利要求6所述的方法,其特征在于,包括:按照如下公式计算渐消因子:
8.根据权利要求6所述的方法,其特征在于,包括:按照如下公式计算预测状态协方差矩阵:
9.一种调制解调器,其特征在于,包括:
10.一种时间同步系统,其特征在于,包括权利要求9所述的调制解调器。
技术总结
本发明公开了一种信号跟踪方法、调制解调器及时间同步系统,涉及高精度时间同步技术领域,该方法包括:获取时间比对信号;利用上一次跟踪环路的更新载波信息和时间比对信号生成载波参数的第一测量值;根据上一次跟踪环路中强跟踪算法的第一迭代参数值、上一次跟踪环路中载波参数的第一估计值和第一测量值计算测量噪声协方差矩阵;利用测量噪声协方差矩阵和本次跟踪环路中强跟踪算法的第二迭代参数值,计算当前跟踪环路中载波参数的第二估计值;利用第二估计值更新载波信息,得到当前跟踪环路的信号跟踪结果。本发明可以提高跟踪环路的信号跟踪结果的准确度,进而有效提高时间比对调制解调器中跟踪环路在高动态环境下的鲁棒性和准确度。
技术研发人员:程燕,张升康,王学运,王海峰,王宏博,易航,杨文哲,郭梁
受保护的技术使用者:北京无线电计量测试研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!