用于机器人的信号采集交互模块的制作方法
1.本实用新型涉及机器人的应用领域,具体地涉及一种用于机器人的信号采集交互模块。
背景技术:
2.随着生活水平的不断提高,消费者对清洁机器人的附加功能有了更高的期待,例如实现语音控制、实时播报、自动避障清扫等功能。然而为了迎合市场的这一需求,现有的清洁机器人需要配置具有上述各项功能的各种部件,部件集成度较差,存在着设计繁杂、功能混乱等缺点,影响了消费者的使用体验。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种集成度高、应用方便的用于机器人的信号采集交互模块。
4.本实用新型为解决上述技术问题而采用的技术方案是一种用于机器人的信号采集交互模块,包括壳体,所述壳体包括上盖板和盒体,所述壳体沿第一轴线呈轴对称结构,所述上盖板和所述盒体盖合而形成所述壳体的内部容纳空间,所述内部容纳空间中包括扬声单元、收音单元和图像采集单元;所述上盖板在所述第一轴线的两侧分别具有第一部分和第二部分,在所述第一部分和所述第二部分对称地设置有多个扬声孔,所述多个扬声孔对应于所述扬声单元,用于使所述扬声单元发出的声音从所述多个扬声孔中被导出,在所述上盖板的中部设置有多个收音孔,所述多个收音孔对应于所述收音单元,用于使所述收音单元通过所述多个收音孔接收声音;所述盒体包括下盖板和侧板,在所述下盖板上设置有连接孔,所述连接孔用于和机器人相连接;所述侧板设置在所述上盖板和所述下盖板之间,在所述侧板上设置有第一摄像孔和第二摄像孔,所述第一摄像孔和第二摄像孔都对应于所述图像采集单元,用于使所述图像采集单元通过所述第一摄像孔和第二摄像孔采集图像。
5.在本实用新型的一实施例中,所述多个收音孔均匀地分布在以所述第一轴线上一点为圆心的圆周上。
6.在本实用新型的一实施例中,所述上盖板和所述下盖板的形状相同,所述上盖板的第一部分包括远离所述第一轴线的第一端,所述第一端为圆弧形结构,所述上盖板的第二部分包括远离所述第一轴线的第二端,所述第二端为圆弧形结构。
7.在本实用新型的一实施例中,所述侧板沿第二轴线呈轴对称结构,所述第一摄像孔设置在所述第二轴线上。
8.在本实用新型的一实施例中,所述第二摄像孔设置在所述第二轴线上。
9.在本实用新型的一实施例中,所述第一摄像孔对应于所述图像采集单元的红外摄像元件。
10.在本实用新型的一实施例中,所述第二摄像孔对应于所述图像采集单元的rgb摄
像元件。
11.在本实用新型的一实施例中,所述上盖板上还包括第三摄像孔,所述第三摄像孔对应于所述图像采集单元,用于使所述图像采集单元通过所述第三摄像孔采集图像。
12.在本实用新型的一实施例中,所述第三摄像孔对应于所述图像采集单元的rgb摄像元件。
13.在本实用新型的一实施例中,所述连接孔中包括偏心转轴螺钉和螺母,当所述信号采集交互模块与所述机器人相连接时,所述偏心转轴螺钉伸入对应的机器人连接孔中。
14.本实用新型的用于机器人的信号采集交互模块集图像采集、温度采集、声音采集以及语音播放于一体,可以广泛应用于有着图像识别,温度识别报警,人机对话等需求的场合,集成度较高,应用方便,节省了安装空间,提升了使用体验。
附图说明
15.为让本实用新型的上述目的、特征和优点能更明显易懂,以下结合附图对本实用新型的具体实施方式作详细说明,其中:
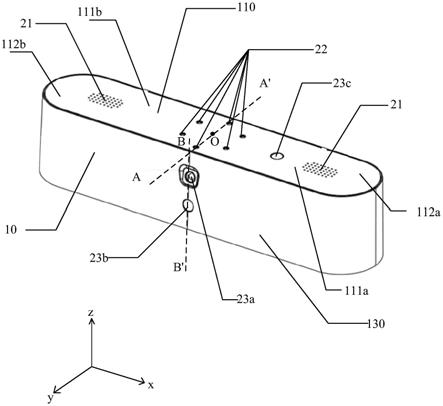
16.图1是本实用新型一实施例的一种用于机器人的信号采集交互模块的立体结构示意图之一;
17.图2是本实用新型一实施例的一种用于机器人的信号采集交互模块的立体结构示意图之二;
18.图3是本实用新型一实施例的一种用于机器人的信号采集交互模块的内部结构示意图;
19.图4a是本实用新型一实施例的信号采集交互模块中的收音单元的示意图;
20.图4b是本实用新型一实施例的信号采集交互模块中的扬声单元的示意图;
21.图4c是本实用新型一实施例的信号采集交互模块中的图像采集单元的示意图;
22.图5是本实用新型一实施例的一种用于机器人的信号采集交互模块的底部示意图;
23.图6是本实用新型一实施例的一种用于机器人的信号采集交互模块的偏心转轴螺钉示意图;
24.图7是本实用新型一实施例的一种用于机器人的信号采集交互模块与机器人的连接示意图。
25.符号说明:
26.信号采集交互模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
27.开关孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
28.壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
29.上盖板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110
30.下盖板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
120
31.侧板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130
32.内部容纳空间
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
140
33.第一部分
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111a
34.第二部分
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111b
35.第一端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112a
36.第二端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112b
37.扬声孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
38.收音孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
39.第一摄像孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23a
40.第二摄像孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23b
41.第三摄像孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23c
42.第四摄像孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23d
43.第三rgb摄像元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23d’44.连接孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24
45.偏心转轴螺钉
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25a
46.螺母
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25b
47.扬声单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
48.收音单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32
49.麦克风
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
321
50.图像采集单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33
51.镜头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
331
52.机器人
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
53.机器人连接孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41
54.偏心转轴螺钉底部的一端
ꢀꢀꢀꢀꢀ
51
55.偏心转轴螺钉底部的另一端
ꢀꢀꢀ
52
56.圆角
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
52a、52b
57.第一轴线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
aa'
58.第二轴线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
bb'
具体实施方式
59.为让本实用新型的上述目的、特征和优点能更明显易懂,以下结合附图对本实用新型的具体实施方式作详细说明。
60.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是本实用新型还可以采用其它不同于在此描述的其它方式来实施,因此本实用新型不受下面公开的具体实施例的限制。
61.如本技术和权利要求书中所示,除非上下文明确提示例外情形,“一”、“一个”、“一种”和/或“该”等词并非特指单数,也可包括复数。一般说来,术语“包括”与“包含”仅提示包括已明确标识的步骤和元素,而这些步骤和元素不构成一个排它性的罗列,方法或者设备也可能包含其他的步骤或元素。
62.在本技术的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理
解为对本技术保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
63.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本技术保护范围的限制。此外,尽管本技术中所使用的术语是从公知公用的术语中选择的,但是本技术说明书中所提及的一些术语可能是申请人按他或她的判断来选择的,其详细含义在本文的描述的相关部分中说明。此外,要求不仅仅通过所使用的实际术语,而是还要通过每个术语所蕴含的意义来理解本技术。
64.以下,基于附图对本实用新型的实施例加以说明。但是,以下所示的实施例是用于将本实用新型的技术思想具体化的用于机器人的信号采集交互模块的例示,本实用新型的用于机器人的信号采集交互模块并不特定为以下的内容。进而,本说明书是为了容易理解权利要求的范围,将对应于实施例所示的构件的编号赋予“权利要求书”及“实用新型内容”栏中所示的构件。但是,绝非将权利要求中所示的构件特定为实施例的构件。特别是记载于实施例的构成构件的尺寸、材质、形状、及其相对的配置等,如无特定的记载,则其意图并不是将本实用新型的范围只限定于此,只不过为说明例。
65.然而,各附图所示的构件的尺寸或位置关系等有时为了明确说明而有夸张。进而,在以下的说明中,对于相同的名称、符号,表示相同或同质的构件,适宜省略其详细说明。进而,构成本实用新型的各要素可以是以相同的构件构成多个要素从而以一个构件兼用多个要素的形态,相反地也可以是由多个构件分担一个构件的功能来实现。另外,在一部分实施例、实施方式中说明的内容也可利用于其它的实施例、实施方式等。另外,在本说明书中,“上”并不限于与上表面接触而形成的情况,也包含分隔地形成于上方的情况,还以也包含层与层之间存在有介在层的含义而使用。
66.本实用新型的信号采集交互模块用于设置在机器人,特别是清洁机器人上,用于采集机器人作业中所涉及的相关信号,并且与外界进行交互动作。
67.图1是本实用新型一实施例的一种用于机器人的信号采集交互模块10的立体结构示意图之一。图2是本实用新型一实施例的一种用于机器人的信号采集交互模块10的立体结构示意图之二。图2的视角与图1的视角不同。结合参考图1、2所示,本实用新型的一实施例中的信号采集交互模块10包括壳体100,壳体100包括上盖板110和盒体,盒体包括下盖板120和侧板130,壳体100沿第一轴线aa'呈轴对称结构。如图1所示,第一轴线aa'位于上盖板110中部。假设信号采集交互模块10所在的三维坐标系是如图1中所示的x-y-z坐标系,第一轴线aa'可以是平行于图1中所示坐标轴y方向的直线。
68.在一些实施例中,下盖板120和侧板130一体成型而形成盒体。
69.上盖板110和盒体盖合而形成壳体100的内部容纳空间(图1、2中并未示出),内部容纳空间中可以设置用于图像采集、温度采集、声音采集以及语音播放等功能的部件。在本实施例中,内部容纳空间中包括扬声单元31、收音单元32和图像采集单元33(图1、2中并未示出)。其中,扬声单元31用于语音播放,收音单元32用于声音采集,图像采集单元33可以包括rgb摄像元件和/或红外摄像元件,其中,红外摄像元件可以用于采集温度。
70.在本实施例中,上盖板110在第一轴线aa'的两侧分别具有第一部分111a和第二部分111b。例如图1中所示的,第一轴线aa'右侧为第一部分111a,第一轴线aa'左侧为第二部分111b,第一部分111a与第二部分111b组合即为完整的上盖板110。在本实施例中,在第一
部分111a和第二部分111b对称地设置有多个扬声孔21,多个扬声孔21对应于扬声单元31,用于使扬声单元31发出的声音从多个扬声孔21中被导出。
71.在本实施例中,扬声孔21对称的设置方式能够使与之相对应的扬声单元31在内部容纳空间140中的安装更加简单便捷,同时加强声音播放效果。在本实用新型的另一些实施例中,扬声孔21可以不对称地分布在第一部分111a和第二部分111b上。
72.在上盖板110的中部还设置有多个收音孔22,多个收音孔22对应于收音单元32,用于使收音单元32通过多个收音孔22接收声音。
73.在本实施例中,多个收音孔22均匀地分布在以第一轴线aa'上一点为圆心的圆周上。如图1所示的实施例中,该圆点是第一轴线aa'在上盖板110上的中点o,该圆周的半径小于上盖板110沿y轴的长度的一半。图示的收音孔22的数量为6个,均匀地分布在以中点o为圆心的圆周上。本实用新型不对收音孔22的个数、大小、形状作具体限制。
74.如图2所示,在本实施例中,下盖板120上设置有连接孔24,该连接孔24用于和机器人40相连接。
75.参考图1和图2所示,侧板130设置在上盖板110和下盖板120之间,在侧板130上设置有第一摄像孔23a和第二摄像孔23b,第一摄像孔23a和第二摄像孔23b都对应于图像采集单元33,用于使图像采集单元33通过第一摄像孔23a和第二摄像孔23b采集图像。
76.如图1所示,在一些实施例中,上盖板110上还包括第三摄像孔23c,第三摄像孔23c也对应于图像采集单元33,用于使图像采集单元33通过第三摄像孔23c采集图像。在图1所示实施例中,第三摄像孔23c设置于上盖板110的第一部分111a,位于收音孔22和位于第一部分111a的扬声孔21之间。
77.结合参考图1-2所示,在本实用新型的一实施例中,上盖板110和下盖板120的形状相同,上盖板110的第一部分111a包括远离第一轴线aa'的第一端112a,即图1所示上盖板110右端,第一端112a为圆弧形结构,上盖板110的第二部分111b包括远离第一轴线aa'的第二端112b,即图1所示上盖板110左端,第二端112b为圆弧形结构。在本实施例中,上盖板110和下盖板120均为运动场形,即可以分割为一个长方形以及两个大小相同的半圆形,并且两个半圆形位于长方形短边两侧,其直径与长方形的短边长度相等。此处半圆形、长方形仅为说明上盖板110与下盖板120的形状,实际上并非彼此分离的部件。
78.本实用新型对第一端112a和第二端112b的弯曲弧度不做限制。
79.需要说明,本技术中上盖板110于盒体可以通过焊接、粘接、以及卡扣卡槽配合等方式连接,本实用新型对其具体连接方式不做限制。
80.参考图1所示,在本实用新型的一实施例中,壳体100整体上沿第一轴线aa'呈对称结构。
81.参考图1所示,在本实用新型的一实施例中,侧板130沿第二轴线bb'呈轴对称结构。需要说明,第一轴线aa'和第二轴线bb'都用于辅助说明壳体的结构、形状等,并不是壳体上的轴。如图1所示,第二轴线bb'位于侧板130中部,平行于z轴。一个第一摄像孔23a设置在第二轴线bb'上。
82.在本实用新型的一实施例中,第二摄像孔23b设置在第二轴线bb'上。
83.进一步的,如图1-2所示实施例中,第一摄像孔23a与第二摄像孔23b均设置在第二轴线bb'上,其中第一摄像孔23a呈圆角矩形,第二摄像孔23b呈圆形。第一摄像孔23a与第二
摄像孔23b的具体形状可以改变,例如矩形、椭圆形等均可。本实用新型对第一摄像孔23a、第二摄像孔23b的数量不作具体限制。
84.图3是本实用新型另一实施例的一种用于机器人的信号采集交互模块10的内部结构示意图。参考图3所示,信号采集交互模块10内部,即内部容纳空间140中设置有扬声单元31、收音单元32和图像采集单元33,以及用于安装这些单元的结构件。
85.在本实用新型的一些实施例中,收音单元32包括麦克风阵列。麦克风阵列采集到的外部声音信号经过处理后可以设备识别,进而可以实现人机对话的功能。
86.在图3所示实施例中,扬声单元31可以设置在下盖板120的内侧;图像采集单元33可以设置在侧板130前侧内部。在一些实施例中,内部容纳空间140中设置有两个扬声单元31,其对称设置在下盖板120的两侧,位置分别与第一部分111a和第二部分111b的扬声孔的位置对应。
87.在本实用新型的其他一些实施例中,扬声单元31、收音单元32和图像采集单元33的安装位置可以为配合工作效果或安装难易程度等发生改变,在此不做具体限制。
88.进一步的,扬声单元31、收音单元32和图像采集单元33可以通过焊接、粘接以及卡扣卡槽配合等方式设置于内部容纳空间140中,其具体安装方式在此不做限制。
89.在一些实施例中,图像采集单元33可以包括一些元件,例如红外摄像元件和rgb摄像元件等。摄像元件可以是摄像头。结合参考图1、3所示,在本实用新型的一实施例中,第一摄像孔23a对应于图像采集单元33的红外摄像元件。红外摄像元件可以通过检测人/物的红外信号判断人/物的温度信息。
90.如图3所示,在本实用新型的一实施例中,第二摄像孔23b对应于图像采集单元33的第一rgb摄像元件。rgb摄像元件可以通过对人/物的图像信息进行采集,从而实现对图像的处理和识别。
91.如图1所示,在本实用新型的一实施例中,第三摄像孔23c对应于图像采集单元33的第二rgb摄像元件。
92.在如图3所示实施例中,信号采集交互模块10还具有一第四摄像孔(图未示出),其安装于侧板130上与第一摄像孔23a、第二摄像孔23b相对的另一侧,且对应于第三rgb摄像元件23d’。图3中由于第三rgb摄像元件23d’的遮挡,第三摄像孔23d并未示出。可以理解的是,在本实施例中信号采集交互模块10中图像采集单元33共具有四个摄像元件,其中包括一个红外摄像元件以及三个rgb摄像元件,且三个rgb摄像元件分别设置于信号采集交互模块10的侧板130的前部、后部以及上部上盖板110。这样的设置能够使信号采集交互模块10的视野范围更广,图像采集范围更广。
93.进一步的,在图3所示的一实施例中,本技术所提供的一种信号采集交互模块10还具有一圆形开关孔11,位于侧板130上。开关孔11用于设置开关,通过开关控制信号采集交互模块10整体的工作状态,操作人员可以通过按压开关控制信号采集交互模块10的启动与关闭。在其他一些实施例中,开关孔11还可以为椭圆形、圆角矩形等形状,本技术在此不做具体限制。
94.进一步的,在本技术的另一些实施例中,信号采集交互模块10的工作状态也可以通过遥控开关进行控制。
95.图4a是本实用新型一实施例的一种收音单元32的示意图。如图4a所示,该收音单
元32是一种麦克风阵列,其中包括6个麦克风321。结合图1和图4a,该6个麦克风321的大小、排列方式对应于收音孔22的大小、排列方式。
96.图4b是本实用新型一实施例的一种扬声单元31的示意图。结合图3和图4b,扬声单元31设置在下盖板120的内侧。
97.图4c是本实用新型一实施例的一种图像采集单元33的示意图。结合图3和图4c,图像采集单元33的镜头331与第一摄像孔23a的位置相对应。需要说明,对于四个摄像孔23a、23b、23c、23d来说,可以分别具有独立的图像采集单元33,也可以共用同一个图像采集单元33,无论如何,每个摄像孔都对应于一个独立的镜头。
98.图5是本实用新型一实施例的一种用于机器人的信号采集交互模块的底部示意图。图6是本实用新型一实施例的一种用于机器人的信号采集交互模块的偏心转轴螺钉示意图。图7是本实用新型一实施例的一种用于机器人的信号采集交互模块与机器人的连接示意图。结合参考图3、5-7所示,在本实用新型的一实施例中,连接孔24中包括偏心转轴螺钉25a和螺母25b,当信号采集交互模块10与机器人40相连接时,偏心转轴螺钉25a伸入对应的机器人连接孔41中。
99.如图3所示,在本实施例中,偏心转轴螺钉25a通过螺母25b固定在位于信号采集交互模块10的下盖板120中部的连接孔24中。
100.本实施例中的偏心转轴螺钉25a如图6所示,偏心转轴螺钉25a底部的一端51为圆弧形,偏心转轴螺钉25a底部的另一端52包括两个圆角52a、52b。在其他一些实施例中,偏心转轴螺钉25a也可以为其他形状,其具体形状本技术在此不做限制。
101.如图7所示,机器人40用于表示机器人的整体或部分结构,机器人连接孔41设置在机器人40的上表面中部。机器人连接孔41的位置、大小与信号采集交互模块的连接孔24相适应。根据需要,机器人连接孔41可以位于机器人40的任意位置。
102.在其他一些实施例中,信号采集交互模块10的下盖板120可以设置多个连接孔24,相应地,在机器人40的顶部可以设置有多个机器人连接孔41,连接孔24和机器人连接孔41一一对应,可以进一步提升连接的稳定性。
103.相较于现有技术,本实用新型所提供的用于机器人的信号采集交互模块集图像采集、温度采集、声音采集以及语音播放于一体,即可用于采集信号,还可以用于与外界的交互,并具有以下优点:
104.(1)可以广泛应用于有着图像识别,温度识别报警,人机对话等需求的场合,功能配置齐全,用户无需因为功能上的需要而购入具有不同功能的机器人,造成资源的浪费。
105.(2)集成度较高,扬声单元、收音单元和图像采集单元设置于内部容纳空间中,节省了安装空间,提升了使用体验。
106.尽管上述披露中通过各种示例讨论了一些目前认为有用的实用新型实施例,但应当理解的是,该类细节仅起到说明的目的,附加的权利要求并不仅限于披露的实施例,相反,权利要求旨在覆盖所有符合本实用新型实施例实质和范围的修正和等价组合。例如,虽然以上所描述的系统组件可以通过硬件设备实现,但是也可以只通过软件的解决方案得以实现,如在现有的服务器或移动设备上安装所描述的系统。
107.同理,应当注意的是,为了简化本实用新型披露的表述,从而帮助对一个或多个实用新型实施例的理解,前文对本实用新型实施例的描述中,有时会将多种特征归并至一个
实施例、附图或对其的描述中。但是,这种披露方法并不意味着本实用新型对象所需要的特征比权利要求中提及的特征多。实际上,实施例的特征要少于上述披露的单个实施例的全部特征。
108.一些实施例中使用了描述成分、属性数量的数字,应当理解的是,此类用于实施例描述的数字,在一些示例中使用了修饰词“大约”、“近似”或“大体上”来修饰。除非另外说明,“大约”、“近似”或“大体上”表明所述数字允许有
±
20%的变化。相应地,在一些实施例中,说明书和权利要求中使用的数值参数均为近似值,该近似值根据个别实施例所需特点可以发生改变。在一些实施例中,数值参数应考虑规定的有效数位并采用一般位数保留的方法。尽管本实用新型一些实施例中用于确认其范围广度的数值域和参数为近似值,在具体实施例中,此类数值的设定在可行范围内尽可能精确。
109.虽然本实用新型已参照当前的具体实施例来描述,但是本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本实用新型,在没有脱离本实用新型精神的情况下还可作出各种等效的变化或替换,因此,只要在本实用新型的实质精神范围内对上述实施例的变化、变型都将落在本技术的权利要求书的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1