水下航行器的自主跟踪拍摄装置
1.本实用新型属于水下摄像技术领域,具体涉及一种水下航行器的自主跟踪拍摄装置。
背景技术:
2.水下航行器是一种具有自主航行能力的水下航行器,由提供控制信号和能源的母机器人以及提供位置信息和续航里程的子机器人组成。水下航行器在海洋中应用广泛,包括海洋环境监测,海底地形探知,海洋生物研究,水下武器投放,水下军事侦察和守卫等;其具有代替工作人员作业,资金开销小,人员安全度高,对水下恶劣环境适应能力强等优点。水下航行器自主对接技术以及路径跟踪控制技术的研究,在工程应用和军事领域得到了越来越多的重视。
3.由于水下的特殊环境,水下航行器的自主对接也存在着很多困难,如:1)航行器在水下不可避免地会受到海流干扰影响,尤其是两体相互靠近时,航行器的水动变化及其复杂;2)受内部与外部因素的影响,航行器的运动体模型参数存在不确定性;3)水下航行器具有典型机械系统的特性,其本身运动存在限制,另外其执行器的无论限制导致其输出存在限制。
4.申请号为cn201721875786.7的实用新型专利提供了一种水下航行器的自主跟踪拍摄系统,包括人体佩戴信标,声呐、矢量水听器和水下航行器。工作时,水下潜水人员佩戴人体佩戴信标,矢量水听器解算人体佩戴信标相对于水下航行器的角度、方向和声源的距离后,发送给水下航行器,水下航行器利用角度、方向和声源的距离对潜水人员进行跟踪,在跟踪的过程中利用摄像头拍摄场景,潜水人员可在水中调整拍摄角度和跟踪距离。
5.申请号为cn201721578753.6的实用新型专利提供了一种水下目标跟踪装置,该实用新型结构简明,使用方便,通过主筒体中的气体发生装置向浮阀中灌气,使得装置能悬浮在水中,达到最佳的追踪拍摄效果,并通过绳索实现自动控制主筒体在水中的深度,调节方便、快捷。
技术实现要素:
6.本实用新型的目的在于提供一种控制精度高、对接快速、稳定性好的水下航行器的自主跟踪拍摄装置。
7.本实用新型为实现上述目的所采取的技术方案为:
8.水下航行器的自主跟踪拍摄装置,包括:
9.主壳体,
10.摄像头,设于主壳体头部的外表面,摄像头与图形处理器相连;
11.驱动器,包括沉浮组件和推动组件,浮沉组件设于主壳体的两侧,推进组件设于主壳体的尾部;
12.中控系统,图像处理器和驱动器均与中控系统相连;
13.中控系统与神经网络观察单元以及轨迹跟踪单元相连接;
14.神经网络观察单元包括扰动观测器和饱和补偿器;轨迹跟踪单元包括轨道检测组件与轨道控制器,轨道控制器根据轨道检测组件以及扰动观测器和饱和补偿器的检测结果修正跟拍轨迹。
15.采用上述技术方案,通过轨迹跟踪单元可实时监控水下环境,例如:航行器的垂直深度、海水的流动状态、障碍物分布等,实时监控水下航行器的航行状态,并建立水下航行器的运动数学模型。在此基础上,利用有限时间原理和固定时间原理,结合神经网络技术与扰动观测器,可分析、测定水下航行器的内部不确定和外部不确定,并实现离线预定义收敛时间与精度,通过饱和补偿器实现执行器的饱和约束,在轨迹跟踪控制中充分考虑水下航行器自身的运动特性和操纵性能,并降低外部环境引起的干扰,实现快速、精准的自主对接,提高自主跟踪路径的精准度。
16.根据本实用新型的一种实施方式,轨道检测组件包括深度传感器、水流传感器、红外线探测器、加速度计和角度检测器。
17.进一步的,水下航行器的自主跟踪拍摄装置还可搭载用于获取航行状态的传感器,如水平仪、陀螺仪、加速度计、指南针及gps等。
18.由此,可实时监控水下航行器的航行状态,有助于中控系统形成精准的参考轨迹,从而提高驱动器运作的准确性。
19.根据本实用新型的一种实施方式,主壳体的头部设有基座,基座包括固定底座和球形转台,球形转台设于固定底座的上方,并且球形转台可转动,摄像头设于球形转台的外表面。
20.由此,摄像头可随球形转台转动,从而拍摄角度不受自身的安装角度的限制,扩大拍摄范围,及时掌控水下环境的状态,从而可在跟拍过程中及时躲避障碍物、合理规划路线、及时调整航行角度。
21.根据本实用新型的一种实施方式,沉浮组件包括浮筒,浮筒的内部通过水平设置的隔板分为上腔体与下腔体,隔板可上下活动;
22.上腔体通过导气管与气体发生器相连,并且上腔体的顶部设有排气管,下腔体的底部设有水管,排气管与水管均与电磁阀相连;气体发生器与电磁阀均在中控系统的操控下运作。
23.进一步的,隔板与浮筒的内部之间设有密封垫,用以保证隔板移动过程中上腔体与下腔体之间的密封性,防止漏气。
24.一般情况下,上腔体内充气,下腔体内装水。调整隔板的位置可改变上腔体和下腔体的容积,从而浮筒的重力发生变化。通过气体发生器可向上腔体内注入气体,随上腔体内部气体量的增加,隔板逐渐下移,在此过程中下腔体的体积逐渐变小,由中控系统控制水管上的电磁阀开启,下腔体内的水向外排放,从而浮筒重力变轻,本自主跟踪拍摄装置上浮。相反的,中控系统控制排气管上的电磁阀开启,上腔体内的气体排出,隔板上移,下腔体体积扩大,外界的水通过水管进入下腔体,浮筒的重力增加,本自主跟踪拍摄装置下沉。由此,可通过沉浮组件的运作调整跟拍装置的自重,从而调整跟拍装置的水下深度,保证航行路径与预设跟踪路径的一致性。
25.此外,通过调整浮筒内的水量与气体体积调整水下深度,绿色节能,对水下环境影
响小,生态友好。另一方面,水量与气体体积为渐变式调整,自主跟踪拍摄装置运作平稳,可降低侧翻风险。
26.根据本实用新型的一种实施方式,主壳体的内部设有配重组件;配重组件包括水箱,水箱的底部设有排水管,排水管与外部连通,水箱的顶部设有进水口,进水口通过水泵与外界连通。
27.由此,可通过水箱的储水和排水调整主壳体的自重,同样可以调控自主跟踪拍摄装置的水下深度。通过配重组件与沉浮组件的配合,保证自主跟踪拍摄装置在水下运作灵敏,尤其是提高其垂直方向上的运作的灵敏度。
28.根据本实用新型的一种实施方式,主壳体的内部设有水平设置的滑轨,水箱与滑轨滑动连接。
29.由此,调整水箱在主壳体内的位置,可降低发生侧翻的风险。在水下航行的过程中,如遇障碍物的冲击,或水流冲击的突变,会导致自主跟踪拍摄装置受力失衡,在这种情况下,中控系统可调控水箱沿滑轨移动,从而调整主壳体的重心,防止侧翻,提高稳定性,保障安全。
30.本实用新型由于采用了扰动观测器和饱和补偿器,在确定跟踪路线时,可降低水下航行器的内部不确定和外部不确定的影响;通过饱和补偿器实现执行器的饱和约束,在轨迹跟踪控制中充分考虑水下航行器自身的运动特性和操纵性能,实现快速、精准的自主对接,提高自主跟踪路径的精准度;通过沉浮组件与配重组件的设置,可提高运作的稳定性、精准度。因此,本实用新型是一种控制精度高、对接快速、稳定性好的水下航行器的自主跟踪拍摄装置。
附图说明
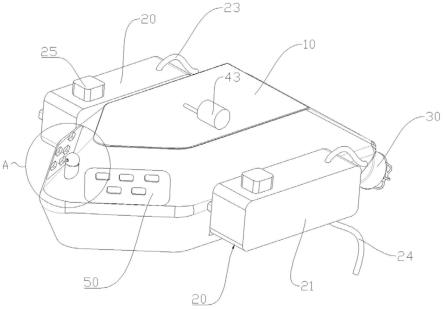
31.图1为根据本实用新型一实施方式的水下航行器的自主跟踪拍摄装置的立体结构示意图;
32.图2为图1中a部的局部放大示意图;
33.图3为图1所示水下航行器的自主跟踪拍摄装置的沉浮组件的结构示意图;
34.图4为图1所示水下航行器的自主跟踪拍摄装置的配重组件的结构示意图。
35.附图标号:主壳体10;摄像头11;基座12;球形转台13;沉浮组件20;浮筒21;上腔体211;下腔体212;隔板22;密封垫221;排气管23;水管24;气体发生器25;导气管26;推动组件30;配重组件40;水箱41;排水管42;水泵43;滑轨44;轨道检测组件50。
具体实施方式
36.以下结合具体实施方式和附图对本实用新型的技术方案作进一步详细描述:
37.图1~图4示意性的显示了根据本实用新型一实施方式的水下航行器的自主跟踪拍摄装置。如图所示,本装置包括主壳体10、摄像头11和驱动器,其中驱动器包括沉浮组件20和推动组件30。具体的,主壳体10类似船型,摄像头11设置在主壳体10的头部,浮沉组件设于主壳体10的两侧,推进组件设于主壳体10的尾部。
38.主壳体10的头部设有基座12,基座12包括固定底座和球形转台13,球形转台13设于固定底座的上方,并且球形转台13可转动,摄像头11设于球形转台13的外表面,摄像头11
通过图形处理器与中控系统相连。
39.沉浮组件20包括浮筒21,浮筒21的内部通过水平设置的隔板22分为上腔体211与下腔体212,上腔体211内充气,下腔体212内装水,隔板22可上下活动。隔板22与浮筒21的内部之间设有密封垫221,用以保证隔板22移动过程中上腔体211与下腔体212之间的密封性,防止漏气。上腔体211通过导气管26与气体发生器25相连,并且上腔体211的顶部设有排气管23,下腔体212的底部设有水管24,排气管23与水管24均与电磁阀相连;气体发生器25与电磁阀均在中控系统的操控下运作。
40.调整隔板22的位置可改变上腔体211和下腔体212的容积,从而浮筒21的重力发生变化。通过气体发生器25可向上腔体211内注入气体,随上腔体211内部气体量的增加,隔板22逐渐下移,在此过程中下腔体212的体积逐渐变小,由中控系统控制水管24上的电磁阀开启,下腔体212内的水向外排放,从而浮筒21重力变轻,本自主跟踪拍摄装置上浮。相反的,中控系统控制排气管23上的电磁阀开启,上腔体211内的气体排出,隔板22上移,下腔体212体积扩大,外界的水通过水管24进入下腔体212,浮筒21的重力增加,本自主跟踪拍摄装置下沉。由此,可通过沉浮组件20的运作调整跟拍装置的自重,从而调整跟拍装置的水下深度,保证航行路径与预设跟踪路径的一致性。
41.主壳体10的内部还设有配重组件40;配重组件40包括水箱41,水箱41的底部设有排水管42,排水管42与外部连通,水箱41的顶部设有进水口,进水口通过水泵43与外界连通。
42.主壳体10的内部还设有水平设置的滑轨44,水箱41的底部与滑轨44滑动连接。水箱41沿滑轨44移动,可降低发生侧翻的风险。在水下航行的过程中,如遇障碍物的冲击,或水流冲击的突变,会导致自主跟踪拍摄装置受力失衡,在这种情况下,中控系统可调控水箱41沿滑轨44移动,从而调整主壳体10的重心,防止侧翻,提高稳定性。
43.中控系统还与神经网络观察单元以及轨迹跟踪单元相连接。神经网络观察单元包括扰动观测器和饱和补偿器,轨迹跟踪单元包括轨道检测组件50与轨道控制器,轨道检测组件50包括深度传感器、水流传感器、红外线探测器、加速度计和角度检测器。
44.为了确定跟踪轨迹,通过扰动观测器先估计出扰动的估计值,再考虑航行器的内部不确定和外部不确定,综合到中控系统后,再结合轨道检测组件50检测到的航行器航行状态,通过轨道控制器修正跟拍轨迹,得出最优的跟拍轨迹。中控系统操控沉浮组件20与推进组件运作,驱动跟踪拍摄装置沿修正后的跟拍轨迹航行。
45.本实施例中,针对外部扰动以及水下航行器运作状态等引发的复合不确定等问题,应用自适应神经网络在线逼近特性与扰动观测器具有对外部未知扰动实时估计的性能,采用神经网络在线逼近水下航行器所遭受的内部不确定部分;结合有限时间原理,通过有限时间扰动观测器在线估计外部扰动和神经网络重构误差;根据有限时间原理,采用逆推设计方法,设计有限时间轨迹跟踪控制律与神经网络自适应律,并融入参数自适应的防漂移技术防止高频干扰和传感器测量噪声导致的自适应参数漂移;融合有限时间控制方法、扰动观测器、自适应技术和神经网络技术的优点,以实时、精确地重构复合不确定,并将通过有限时间轨迹跟踪控制律予以补偿,提高对水下航行器的自主对接轨迹跟踪控制的稳定性。
46.在有限时间扰动观测器的基础之上,应用固定时间理论,结合指定性能控制技术
和有限时间稳定理论,构造具有可离线确定的指定收敛时间与精度的新性能函数h(t)。以参考轨迹作为外部参考信号,建立航行器位置(x,y)和首向误差与性能函数h(t)之间的非线性映射θ(ξ)(ξ为函数θ(ξ)的变量)。利用非线性映射航行器运动学方程,建立航行器位置与首向误差与变量θ(ξ)之间的新动态方程。基于此,利用逆推/动态面设计方法,与自适应神经网络技术,设计轨迹跟踪控制律与神经网络自适应律,以保证变量收敛,从而实现航行器位置(x,y)和首向误差以预指定时间收敛到预指定的范围,并保持在指定预指定范围内。
47.本实用新型的操作步骤中的常规操作为本领域技术人员所熟知,在此不进行赘述。
48.以上所述的实施例对本实用新型的技术方案进行了详细说明,应理解的是以上所述仅为本实用新型的具体实施例,并不用于限制本实用新型,凡在本实用新型的原则范围内所做的任何修改、补充或类似方式替代等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1