可调视角的双目相机和电子设备的制作方法
1.本技术属于双目相机领域,特别涉及一种可调视角的双目相机和电子设备。
背景技术:
2.现有技术的双目相机,两个摄像头的位置、角度相对固定,具有一定的视角局限性。在视觉导航等领域,为了获得更大的视角范围,可以使用更多数量的摄像头,相应的也会增加成本。在例如人形机器人领域,摄像头的数量无法增加,使双目相机的视角范围增加更显得尤为重要。
技术实现要素:
3.本技术旨在提出一种可调视角的双目相机和电子设备,使双目相机的视角范围较大。
4.本技术提出一种可调视角的双目相机,所述可调视角的双目相机包括:
5.基座;
6.第一摄像头模组;
7.第二摄像头模组;
8.水平驱动连接臂,所述水平驱动连接臂能够相对于所述第一摄像头模组滑动地连接于所述第一摄像头模组和所述第二摄像头模组,
9.俯仰驱动连接臂,所述俯仰驱动连接臂能够相对于所述基座转动地连接于所述基座,所述第一摄像头模组和所述第二摄像头模组能够转动地连接于俯仰驱动连接臂;
10.水平驱动单元,所述水平驱动单元固定连接于所述基座,所述水平驱动单元能够通过所述水平驱动连接臂驱动所述第一摄像头模组绕沿第一方向延伸的第一轴线转动,并且驱动所述第二摄像头模组绕沿所述第一方向延伸的第二轴线转动;以及
11.俯仰驱动单元,所述俯仰驱动单元固定连接于所述基座,所述俯仰驱动单元能够通过所述俯仰驱动连接臂驱动所述第一摄像头模组和所述第二摄像头模组绕沿第二方向延伸的第三轴线转动,所述第一方向和所述第二方向垂直。
12.可选地,所述水平驱动连接臂包括:
13.第一连接臂,所述第一连接臂能够相对于所述第一摄像头模组滑动地连接于所述第一摄像头模组;以及
14.第二连接臂,所述第二连接臂能够相对于所述第二摄像头模组滑动地连接于所述第二摄像头模组;
15.所述水平驱动单元包括:
16.第一驱动单元,所述第一驱动单元固定连接于所述基座,所述第一驱动单元能够通过所述第一连接臂驱动所述第一摄像头模组绕沿第一方向延伸的第一轴线转动;以及
17.第二驱动单元,所述第二驱动单元固定连接于所述基座,所述第二驱动单元能够通过所述第二连接臂驱动所述第二摄像头模组绕沿所述第一方向延伸的第二轴线转动。
18.可选地,所述第一驱动单元的输出轴和所述第二驱动单元的输出轴平行,所述俯仰驱动单元的输出轴和所述第一驱动单元的输出轴垂直。
19.可选地,所述俯仰驱动连接臂和所述基座连接的转轴沿水平方向延伸,并且该转轴与所述第一摄像头模组和所述俯仰驱动连接臂连接的转轴垂直,
20.所述俯仰驱动连接臂和所述基座连接的转轴与所述第二摄像头模组和所述俯仰驱动连接臂连接的转轴垂直。
21.可选地,所述第一摄像头模组设置有第一凹槽,所述第一连接臂设置有第一配合部,所述第一配合部嵌入所述第一凹槽,使所述第一配合部能够沿所述第一凹槽滑动,
22.所述第二摄像头模组设置有第二凹槽,所述第二连接臂设置有第二配合部,所述第二配合部嵌入所述第二凹槽,使所述第二配合部能够沿所述第二凹槽滑动。
23.可选地,所述第一凹槽和所述第二凹槽呈圆弧状,所述第一摄像头模组绕所述第三轴线转动的过程中,所述第一配合部保持在所述第一凹槽中,所述第二摄像头模组绕所述第三轴线转动的过程中,所述第二配合部保持在所述第二凹槽中。
24.可选地,所述第一摄像头模组包括球形的第一摄像头基体和位于所述第一摄像头基体正面的第一摄像头,所述第一凹槽位于所述第一摄像头基体的背面,
25.所述第二摄像头模组包括球形的第二摄像头基体和位于所述第二摄像头基体正面的第二摄像头,所述第二凹槽位于所述第二摄像头基体的背面。
26.可选地,在所述第一摄像头和所述第二摄像头平视状态下,所述第一配合部位于所述第一凹槽的中间位置,所述第二配合部位于所述第二凹槽的中间位置。
27.可选地,在所述第一摄像头平视状态下,所述第一摄像头模组和所述俯仰驱动连接臂相对转动的转轴与所述第一驱动单元的输出轴平行,
28.在所述第二摄像头平视状态下,所述第二摄像头模组和所述俯仰驱动连接臂相对转动的转轴与所述第二驱动单元的输出轴平行。
29.可选地,所述可调视角的双目相机还包括外壳,所述基座连接于所述外壳,所述外壳形成有容纳所述基座的缺口,所述基座嵌入所述缺口内从而使所述基座连接于所述外壳。
30.可选地,所述水平驱动连接臂包括:
31.水平驱动连接臂主体,所述水平驱动连接臂主体能够相对于所述第一摄像头模组滑动地连接于所述第一摄像头模组;以及
32.连接件,所述连接件能够转动地连接于所述第一摄像头模组和所述第二摄像头模组,所述连接件使所述第一摄像头模组和所述第二摄像头模组能够同步地相对于所述俯仰驱动连接臂转动;
33.所述水平驱动单元能够通过所述水平驱动连接臂主体驱动所述第一摄像头模组绕沿第一方向延伸的第一轴线转动,通过所述连接件驱动所述第二摄像头模组绕沿所述第一方向延伸的第二轴线转动。
34.可选地,所述水平驱动连接臂包括:
35.第一水平驱动连接臂,所述第一水平驱动连接臂能够相对于所述第一摄像头模组滑动地连接于所述第一摄像头模组;以及
36.第二水平驱动连接臂,所述第二水平驱动连接臂能够相对于所述第二摄像头模组
滑动地连接于所述第二摄像头模组;
37.所述俯仰驱动连接臂包括:
38.第一俯仰驱动连接臂,所述第一俯仰驱动连接臂能够相对于所述基座转动地连接于所述基座,所述第一摄像头模组能够转动地连接于所述第一俯仰驱动连接臂;以及
39.第二俯仰驱动连接臂,所述第二俯仰驱动连接臂能够相对于所述基座转动地连接于所述基座,所述第二摄像头模组能够转动地连接于所述第二俯仰驱动连接臂;
40.所述水平驱动单元包括:
41.第一水平驱动单元,所述第一水平驱动单元固定连接于所述基座,所述第一水平驱动单元能够通过所述第一水平驱动连接臂驱动所述第一摄像头模组绕沿第一方向延伸的第一轴线转动;以及
42.第二水平驱动单元,所述第二水平驱动单元固定连接于所述基座,所述第二水平驱动单元能够通过所述第二水平驱动连接臂驱动所述第二摄像头模组绕沿第一方向延伸的第二轴线转动;
43.所述俯仰驱动单元包括:
44.第一俯仰驱动单元,所述第一俯仰驱动单元固定连接于所述基座,所述第一俯仰驱动单元能够通过所述第一俯仰驱动连接臂驱动所述第一摄像头模组绕沿第二方向延伸的第三轴线转动;以及
45.第二俯仰驱动单元,所述第二俯仰驱动单元固定连接于所述基座,所述第二俯仰驱动单元能够通过所述第二俯仰驱动连接臂驱动所述第二摄像头模组绕沿第二方向延伸的第三轴线转动,所述第一方向和所述第二方向垂直。
46.本技术再提出一种电子设备,所述电子设备包括控制单元和上述技术方案中任一项所述的可调视角的双目相机。
47.通过采用上述技术方案,使双目相机的两个摄像头模组都能够转动,从而使双目相机的视角范围较大。
附图说明
48.图1示出了根据本技术的实施方式的可调视角的双目相机的结构示意图。
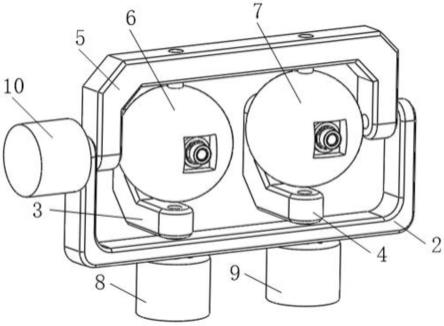
49.图2示出了根据本技术的实施方式的可调视角的双目相机(拆除外壳)的结构示意图。
50.图3示出了根据本技术的实施方式的可调视角的双目相机(拆除外壳)的另一角度的结构示意图。
51.图4示出了根据本技术的实施方式的可调视角的双目相机的双目直视状态的正视图。
52.图5示出了根据本技术的实施方式的可调视角的双目相机的双目斜视状态的正视图。
53.图6示出了根据本技术的实施方式的可调视角的双目相机的双目分别斜视状态的正视图。
54.图7示出了根据本技术的实施方式的可调视角的双目相机的双目俯视状态的正视图。
55.图8示出了根据本技术的实施方式的可调视角的双目相机的双目仰视状态的正视图。
56.图9示出了根据本技术的实施方式的可调视角的双目相机的双目仰视状态的结构示意图。
57.附图标记说明
58.1外壳 11前壳 12后壳 13保护罩
59.2基座
60.3第一连接臂
61.4第二连接臂
62.5第三连接臂
63.6第一摄像头模组 61第一摄像头基体 62第一摄像头 63第一凹槽
64.7第二摄像头模组 71第二摄像头基体 72第二摄像头 73第二凹槽
65.8第一驱动单元
66.9第二驱动单元
67.10第三驱动单元
68.x水平方向 y竖直方向。
具体实施方式
69.为了更加清楚地阐述本技术的上述目的、特征和优点,在该部分结合附图详细说明本技术的具体实施方式。除了在本部分描述的各个实施方式以外,本技术还能够通过其他不同的方式来实施,在不违背本技术精神的情况下,本领域技术人员可以做相应的改进、变形和替换,因此本技术不受该部分公开的具体实施例的限制。本技术的保护范围应以权利要求为准。
70.如图1至图9所示,本技术提出一种可调视角的双目相机,可调视角的双目相机可以用于例如人形机器人、扫地机器人、机械臂和自动驾驶车辆等设备。可调视角的双目相机包括外壳1、基座2、水平驱动连接臂、俯仰驱动连接臂、第一摄像头模组6、第二摄像头模组7、水平驱动单元和俯仰驱动单元。
71.在本技术一些实施方式中,水平驱动连接臂包括第一连接臂3和第二连接臂4,俯仰驱动连接臂包括第三连接臂5。水平驱动单元包括第一驱动单元8和第二驱动单元9,俯仰驱动单元包括第三驱动单元10。
72.如图1所示,外壳1可以包括前壳11和后壳12,前壳11和后壳12连接在一起形成空腔。前后方向垂直于水平方向和竖直方向,前壳11位于前后方向上的前侧,后壳12位于前后方向上的后侧。基座2连接于外壳1,例如,在前壳11和/或后壳12的连接部分可以形成有容纳基座2的缺口,基座2嵌入缺口内从而使基座2连接于外壳1。
73.可以理解,上述基座2可以作为外壳1的一部分。例如,在本技术中描述水平驱动单元和俯仰驱动单元安装于基座2时,包括了水平驱动单元和俯仰驱动单元安装于基座2和/或外壳1的情况,俯仰驱动连接臂可转动地连接于基座2亦包括了俯仰驱动连接臂可转动地连接于基座2和/或外壳1的情况下。在本实施方式中,基座2包括沿水平方向x延伸的水平延伸部以及连接于水平延伸部两端的沿竖直方向y延伸的竖直延伸部。俯仰驱动连接臂包括
第三连接臂5,第三连接臂5可以与基座2的形状相似,第三连接臂5也包括沿水平方向x延伸的水平延伸部以及连接于水平延伸部两端的沿竖直方向y延伸的竖直延伸部,但本技术不限制基座2和第三连接臂5的具体形状和构造。基座2和第三连接臂5可以围成框架,第一摄像头模组6和第二摄像头模组7可以位于框架限定的范围内,这样也可以避免第一摄像头模组6和第二摄像头模组7被碰撞。
74.前壳11设置有使第一摄像头模组6和第二摄像头模组7至少部分露出的开孔,例如前壳11可以设置两个开孔,两个开孔分别使第一摄像头模组6和第二摄像头模组7露出,开孔可以是圆孔。
75.进一步的,前壳11的开孔处可以设置有保护罩13,保护罩13可以通过粘贴、卡扣或螺栓等方式连接于前壳11,保护罩13可以是凸出于前壳11的表面的球形面,保护罩13由透明材料制成,可以在不影响摄像头拍摄的同时起到防尘作用。在其他可能的实施方式中,开孔也可以是非圆的其他形状,保护罩也可以是非球形的其他形状。
76.可以理解,可调视角的双目相机的外壳1不是必需的,在其他可能的实施方式中,可调视角的双目相机也可以不包括外壳。
77.如图2至图9所示,第一摄像头模组6包括第一摄像头基体61和第一摄像头62,第一摄像头基体61可以为球形,第一摄像头62设置于第一摄像头基体61的正面。第一摄像头模组6的表面设置有第一凹槽63,第一凹槽63可以位于第一摄像头模组6的背面。
78.第二摄像头模组7包括第二摄像头基体71和第二摄像头72,第二摄像头基体71可以为球形,第二摄像头72设置于第二摄像头基体71的正面。第二摄像头模组7的表面设置有第二凹槽73,第二凹槽73可以位于第二摄像头模组7背面。
79.第一凹槽63和第二凹槽73都呈圆弧状,第一凹槽63可以在球形的第一摄像头基体61的背面延伸大于例如90度的角度,第二凹槽73可以在球形的第二摄像头基体71的背面延伸大于例如90度的角度。在图3和图4所示的双目直视状态下,第一凹槽63和第二凹槽73各自所在的平面(沿前后方向和竖直方向y的平面)均垂直于第三驱动单元10的输出轴(即,垂直于后述的第三轴线)。
80.第一摄像头模组6和第二摄像头模组7沿水平方向x(第二方向)排列,从而可模拟人的双眼。第一摄像头模组6和第二摄像头模组7可以在一定角度范围内转动,使第一摄像头62和第二摄像头72可以朝向不同方向,做出类似人形机器人的眼球转动的动作。
81.如图2至图9所示,第一摄像头模组6和第二摄像头模组7均通过转轴能够转动地连接于第三连接臂5,它们的转轴平行并且都垂直于第三驱动单元10的输出轴。具体的,两根转轴可以分别固定连接于第一摄像头模组6和第二摄像头模组7,第三连接臂5设置有容纳转轴的圆孔或凹槽;或者两根转轴可以固定连接于第三连接臂5,第一摄像头模组6和第二摄像头模组7均设置有容纳转轴的圆孔或凹槽。转轴可以位于第三连接臂5的水平延伸部。
82.第一驱动单元8、第二驱动单元9和第三驱动单元10均固定连接于基座2和/或外壳1,例如第一驱动单元8、第二驱动单元9和第三驱动单元10均通过螺栓固定连接于基座2和/或外壳1。在本实施方式中,第一驱动单元8、第二驱动单元9和第三驱动单元10可以是电机。第一驱动单元8的输出轴和第二驱动单元9的输出轴平行,第三驱动单元10的输出轴和第一驱动单元8的输出轴垂直。例如,第一驱动单元8和第二驱动单元9的输出轴可以沿竖直方向y延伸,第三驱动单元的输出轴可以沿水平方向x延伸。
83.第一摄像头模组6连接于第一连接臂3,第一连接臂3连接于第一驱动单元8的输出轴,第一驱动单元8可以驱动第一连接臂3带动第一摄像头模组6绕第一驱动单元8的输出轴的轴线(第一轴线)旋转。
84.第二摄像头模组7连接于第二连接臂4,第二连接臂4连接于第二驱动单元9的输出轴,第二驱动单元9可以驱动第二连接臂4带动第二摄像头模组7绕第二驱动单元9的输出轴的轴线(第二轴线)旋转。
85.第三连接臂5通过转轴能够相对于基座2转动地连接于基座2,第三驱动单元10的输出轴连接于第三连接臂5,第三驱动单元10可以驱动第三连接臂5相对于基座2转动。
86.第一连接臂3可以是l形臂,在拐角位置可以具有倒角或圆角过渡,第一连接臂3设置有第一配合部,第一配合部可以沿第一凹槽63滑动地连接于第一凹槽63。第一配合部可以设置于第一连接臂3的端部。第二连接臂4可以是l形臂,在拐角位置可以具有倒角或圆角过渡,第二连接臂4设置有第二配合部,第二配合部可以沿第二凹槽73滑动地连接于第二凹槽73。第二配合部可以设置于第二连接臂4的端部。第一配合部可以与第一凹槽63的宽度相同,第一连接臂3在改变旋转方向时,第一摄像头模组6可以及时跟随响应。第一配合部可以与第二凹槽73的宽度相同,第二连接臂4在改变旋转方向时,第二摄像头模组7可以及时跟随响应。例如,第一配合部和第二配合部均可以包括柱状连杆和球体,柱状连杆一端固定连接于第一连接臂3/第二连接臂4的端部,另一端固定/可拆卸连接于球体,球体可嵌入第一凹槽63/第二凹槽73。
87.第三驱动单元10带动第三连接臂5运动时,第一配合部保持在第一凹槽63中,第一凹槽63相对于第一配合部运动,第二配合部保持在第二凹槽73中,第二凹槽73相对于第二配合部运动。
88.如图2至图4所示,在第一摄像头62和第二摄像头72平视(没有俯仰角度变化,可以有水平角度变化)状态下,第一配合部位于第一凹槽63的中间位置,第二配合部位于第二凹槽73的中间位置。
89.如图7所示,在第一摄像头62和第二摄像头72俯视状态(可以有水平角度变化)下,第一配合部位于第一凹槽63的偏下的位置,第二配合部位于第二凹槽73的偏下的位置。
90.如图8和图9所示,在第一摄像头62和第二摄像头72仰视状态(可以有水平角度变化)下,第一配合部位于第一凹槽63的偏上位置,第二配合部位于第二凹槽73的偏上位置。
91.第一摄像头模组6通过转轴能够转动地连接于第三连接臂5,第二摄像头模组7通过转轴能够转动地连接于第三连接臂5。在第一摄像头62平视状态下,第一摄像头模组6和第三连接臂5相对转动的转轴与第一驱动单元8的输出轴平行,在第二摄像头72平视状态下,第二摄像头模组7和第三连接臂5相对转动的转轴与第二驱动单元9的输出轴平行。
92.参照图5和图6,第一驱动单元8可以驱动第一连接臂3旋转,第一配合部拨动第一凹槽63的侧壁从而使第一摄像头模组6绕第一驱动单元8的输出轴的轴线转动。第二驱动单元9可以驱动第二连接臂4旋转,第二配合部拨动第二凹槽73的侧壁从而使第二摄像头模组7绕第二驱动单元9的输出轴的轴线转动。第一驱动单元8和第二驱动单元9的旋转方向相同,那么第一摄像头模组6和第二摄像头模组7向相同的方向转动,第一驱动单元8和第二驱动单元9的旋转方向相反,那么第一摄像头模组6和第二摄像头模组7向相反的方向转动。
93.参照图7至图9,第三驱动单元10可以驱动第三连接臂5旋转,使第一摄像头模组6
和第二摄像头模组7绕第三驱动单元10的输出轴的轴线转动,使第一摄像头62和第二摄像头72共同向上倾斜(即仰视)或向下倾斜(即俯视)。
94.第一驱动单元8、第二驱动单元9和第三驱动单元10可以共同驱动第一摄像头模组6和第二摄像头模组7绕沿竖直方向y(第一方向)延伸的第一轴线和第二轴线转动以及绕沿水平方向x(第二方向)延伸的第三轴线转动,从而调节第一摄像头62和第二摄像头72的朝向。
95.两个摄像头模组能够单独绕沿竖直方向y(第一方向)延伸的第一轴线和第二轴线转动,并且使用一个驱动单元(第三驱动单元)就可以使两个摄像头模组一起绕沿水平方向x(第二方向)延伸的第三轴线转动,可以使可调视角的双目相机结构紧凑,体积较小。
96.本技术可以通过摄像头模组6、7的旋转,增加双目相机的取景范围,获得较大的视觉范围。
97.使用本技术的双目相机的扫地机器人,可以通过视觉导航,具有较大的视觉范围,占用较小的内部空间。使用本技术的双目相机的人形机器人,可以使用双目相机模拟人的眼球运动。使用本技术的双目相机的机械臂,可以通过两个摄像头获得图像的差异,获取深度信息,在较大的视觉范围内实现较好的壁障效果。
98.上述具体实施方式中采用电机作为驱动单元,然而本技术不限于此,驱动单元8、9、10还可以是气缸、手动转轮等驱动部件。
99.在上述实施方式,使用两个驱动单元8、9分别驱动两个摄像头模组6、7旋转,然而本技术不限于此,比如可调视角的双目相机也可以使用一个水平驱动单元驱动两个摄像头模组同步旋转。具体地,水平驱动连接臂包括水平驱动连接臂主体和连接件,连接件的两端可以分别可转动地连接于第一配合部和第二配合部。省略上述实施方式中的第一驱动单元8和第一连接臂3或者第二驱动单元9和第二连接臂4,上述实施方式中的第一驱动单元或第二驱动单元作为水平驱动单元,第一连接臂或第二连接臂作为水平驱动连接臂主体,通过连接件可以驱动两个摄像头模组共同旋转。第三驱动单元作为俯仰驱动单元,第三连接臂作为俯仰驱动连接臂。这样的双目相机可以优选用于扫地机器人和机械臂。
100.再比如,可调视角的双目相机还可以使用两个驱动单元驱动两个摄像头模组在水平方向分别旋转,两个驱动单元驱动两个摄像头模组在竖直方向分别旋转,调节俯仰视角。水平驱动单元包括第一水平驱动单元和第二水平驱动单元,俯仰驱动单元包括第一俯仰驱动单元和第二俯仰驱动单元,水平驱动连接臂包括第一水平驱动连接臂和第二水平驱动连接臂,俯仰驱动连接臂包括第一俯仰驱动连接臂和第二俯仰驱动连接臂。具体地,可以将上述具体实施方式的第三连接臂5可以从中间截断分为第一俯仰驱动连接臂和第二俯仰驱动连接臂,第一俯仰驱动连接臂能够相对于基座2转动地连接于基座2,第一摄像头模组6能够转动地连接于第一俯仰驱动连接臂。第二纵向驱动连接臂能够相对于基座2转动地连接于基座2,第二摄像头模组7能够转动地连接于第二俯仰驱动连接臂。上述实施方式中的第三驱动单元10作为第一俯仰驱动单元,第一俯仰驱动单元固定连接于基座2,第一俯仰驱动单元能够通过第一俯仰驱动连接臂驱动第一摄像头模组6绕沿第二方向延伸的第三轴线转动。第二俯仰驱动单元固定连接于基座2(例如与第三驱动单元10镜像设置在基座2另一侧),第二俯仰驱动单元能够通过第二俯仰驱动连接臂驱动第二摄像头模组7绕沿第二方向延伸的第三轴线转动。
101.例如人形机器人、扫地机器人、机械臂等电子设备可以包括可调视角的双目相机和控制单元,控制单元电连接于双目相机的各驱动单元,从而控制各驱动单元动作,调节双目相机的摄像头模组6、7的朝向,从而对多个区域进行相机参数标定,并建立标定的参数与电机转动角度的关系。电子设备使用中可以借助标定的参数和电机转动角度之间的关系,确定当前视角范围的电机转动角度对应的相机参数,从而在调节两个摄像头模组时,保持标定参数的有效性,实现较大的可视范围。
102.虽使用上述实施方式对本技术进行了详细说明,但对于本领域技术人员来说,本技术显然并不限于在本说明书中说明的实施方式。本技术能够在不脱离由权利要求书所确定的本技术的主旨以及范围的前提下加以修改并作为变更实施方式加以实施。因此,本说明书中的记载以示例说明为目的,对于本技术并不具有任何限制性的含义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1