用于量子通信的相位编码装置和量子通信设备的制作方法
1.本实用新型涉及量子通信技术领域,尤其涉及用于量子通信的相位编码装置以及包括该相位编码装置的量子通信设备。
背景技术:
2.目前,在量子通信系统中,通常采用如图1所示的相位编码装置来实现相位编码。在图1示出的相位编码装置中,主要使用不等臂干涉仪将单个光源x产生的光脉冲分为一前一后两个光脉冲,然后通过相位调制器pm在两个前后脉冲之间调制出0、π/2、3π/2和π四种不同的相位差来编码和承载信息。换言之,相位调制器pm必须能够加载四种不同的相位调制电压并且在这四种不同的相位调制电压之间来回反复切换才能实现相位编码。
3.然而,相位调制器在每次切换时均需要对相位调制电压的脉冲的上升沿和平坦区进行调制,而这种反复切换相位调制电压的方式不仅会导致相位调制器所加载的相位调制电压不稳定,而且还会导致所调制的相位差的精度变差,进而降低系统的成码率。
技术实现要素:
4.本实用新型的目的在于提供用于量子通信的相位编码装置和量子通信设备。
5.根据本实用新型的一方面,提供一种用于量子通信的相位编码装置,所述相位编码装置包括:第一光源;第二光源;第三光源;第四光源;第一不等臂干涉仪,光连接至所述第一光源和所述第二光源,用于将所述第一光源和所述第二光源输出的光脉冲分成时间上相邻的第一路子光脉冲和第二路子光脉冲;第二不等臂干涉仪,光连接至所述第三光源和所述第四光源,用于将所述第三光源和所述第四光源输出的光脉冲分成时间上相邻的第三路子光脉冲和第四路子光脉冲;相位调制器,设置在所述第二不等臂干涉仪的长臂上,用于向所述长臂施加相位调制电压;以及控制器,电连接至所述第一光源、所述第二光源、所述第三光源和所述第四光源,用于执行以下操作:当经由所述第一光源或所述第二光源输出光脉冲时,根据基于所述第一路子光脉冲和所述第二路子光脉冲在所述第一不等臂干涉仪的分束器和合束器上的相位变化而在所述第一路子光脉冲与所述第二路子光脉冲之间形成的第一相位差或第二相位差进行相位编码,当经由所述第三光源或所述第四光源输出光脉冲时,根据基于所述第三路子光脉冲和所述第四路子光脉冲在所述第二不等臂干涉仪的分束器和合束器上的相位变化以及由所述相位调制电压引起的相位差而在所述第三路子光脉冲与所述第四路子光脉冲之间形成的第三相位差或第四相位差进行相位编码。
6.优选地,由所述相位调制电压引起的相位差为π/2。
7.优选地,所述第一相位差和所述第二相位差分别为π和0,所述第三相位差和所述第四相位差分别为3π/2和π/2。
8.优选地,所述相位编码装置还包括:强度调制器,设置于所述第一不等臂干涉仪和所述第二不等臂干涉仪的输出端,用于向所述第一不等臂干涉仪和所述第二不等臂干涉仪输出的光脉冲施加强度调制电压,其中,所述控制器通过所述强度调制器施加的强度调制
电压对从所述第一不等臂干涉仪和所述第二不等臂干涉仪输出的光脉冲进行诱骗态处理。
9.根据本实用新型的另一方面,提供一种量子通信设备,所述量子通信设备包括如前所述的用于量子通信的相位编码装置。
10.本实用新型所提供的相位编码装置和量子通信设备能够在无需切换光源且相位调制器仅需加载一种相位调制电压的情况下提供系统所需的四种相位编码,这样不仅能够有效地避免因相位调制器在四种不同的相位调制电压之间来回反复切换而导致相位调制器所加载的相位调制电压不稳定的问题,而且还能够进一步提升系统成码的速率。
附图说明
11.通过下面结合附图进行的描述,本实用新型的上述目的和特点将会变得更加清楚。
12.图1示出了相关技术中的用于量子通信的相位编码装置的示意图。
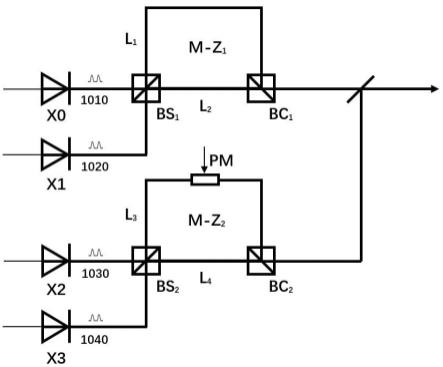
13.图2示出了本实用新型的用于量子通信的相位编码装置的示意图。
14.图3示出了使用本实用新型的用于量子通信的相位编码装置进行相位编码的光脉冲调制示意图。
具体实施方式
15.下面,将参照附图来详细地说明本实用新型的实施例。
16.参照图2,本实用新型的用于量子通信的相位编码装置可包括光源x0、光源x1、光源x2、光源x3、不等臂干涉仪m-z1、不等臂干涉仪m-z2、相位调制器pm以及控制器(未示出),诸如,但不限于,fpga、mcu等控制芯片。
17.在图2示出的用于量子通信的相位编码装置中,不等臂干涉仪m-z1可光连接至光源x0和光源x1,其可用于将光源x0和光源x1输出的光脉冲分成时间上相邻的第一路子光脉冲和第二路子光脉冲;不等臂干涉仪m-z2可光连接至光源x2和光源x3,其可用于将光源x2和光源x3输出的光脉冲分成时间上相邻的第三路子光脉冲和第四路子光脉冲;相位调制器pm可设置在不等臂干涉仪m-z2的长臂l3上,其可用于向长臂l3施加相位调制电压;控制器可电连接至光源x0、光源x1、光源x2和光源x3,其可用于执行以下操作:当经由光源x0和光源x1中的一者输出光脉冲时,根据基于第一路子光脉冲和第二路子光脉冲在不等臂干涉仪m-z1的分束器bs1和合束器bc1上的相位变化而在第一路子光脉冲与第二路子光脉冲之间形成的第一相位差或第二相位差进行相位编码,当经由光源x2和光源x3中的一者输出光脉冲时,根据基于第三路子光脉冲和第四路子光脉冲在不等臂干涉仪m-z2的分束器bs2和合束器bc2上的相位变化以及由相位调制电压引起的相位差而在第三路子光脉冲与第四路子光脉冲之间形成的第三相位差或第四相位差进行相位编码。
18.另外,在图2示出的用于量子通信的相位编码装置中,还可包括强度调制器(未示出),强度调制器可设置于不等臂干涉仪m-z1和不等臂干涉仪m-z2的输出端,其可用于向不等臂干涉仪m-z1和不等臂干涉仪m-z2输出的光脉冲施加强度调制电压,控制器可通过强度调制器施加的强度调制电压对从不等臂干涉仪m-z1和不等臂干涉仪m-z2输出的光脉冲进行诱骗态处理,以使得输出的光脉冲的强度进一步减弱。
19.下面,将结合图2和图3进一步详细地描述使用本实用新型的用于量子通信的相位
编码装置进行相位编码的光脉冲调制过程。
20.在图3示出的光脉冲调制过程中,控制器可通过光源x0向不等臂干涉仪m-z1输出光脉冲1010,光脉冲1010被不等臂干涉仪m-z1分成两路子光脉冲1011和1012,其中,子光脉冲1011可从不等臂干涉仪m-z1的分束器bs1进入到不等臂干涉仪m-z1的长臂l1中并且沿着不等臂干涉仪m-z1的长臂l1传输至不等臂干涉仪m-z1的合束器bc1,子光脉冲1012可从不等臂干涉仪m-z1的分束器bs1进入到不等臂干涉仪m-z1的短臂l2中并且沿着不等臂干涉仪m-z1的短臂l2传输至不等臂干涉仪m-z1的合束器bc1。在上述传输过程中,子光脉冲1011的相位因不等臂干涉仪m-z1的分束器bs1和合束器bc1的反射而增加π,子光脉冲1012的相位因不等臂干涉仪m-z1的分束器bs1和合束器bc1的透射而并未发生变化。因此,可基于两路子光脉冲1011和1012在不等臂干涉仪m-z1的分束器bs1和合束器bc1上的相位变化而在两路子光脉冲1011和1012之间形成第一相位差π(即,φ=π)。相应地,控制器可根据由此而得到的第一相位差π而实现对两路子光脉冲1011和1012的相位编码。
21.在图3示出的光脉冲调制过程中,控制器还可通过光源x1向不等臂干涉仪m-z1输出光脉冲1020,光脉冲1020被不等臂干涉仪m-z1分成两路子光脉冲1021和1022,其中,子光脉冲1021可从不等臂干涉仪m-z1的分束器bs1进入到不等臂干涉仪m-z1的长臂l1中并且沿着不等臂干涉仪m-z1的长臂l1传输至不等臂干涉仪m-z1的合束器bc1,子光脉冲1022可从不等臂干涉仪m-z1的分束器bs1进入到不等臂干涉仪m-z1的短臂l2中并且沿着不等臂干涉仪m-z1的短臂l2传输至不等臂干涉仪m-z1的合束器bc1。在上述传输过程中,子光脉冲1021的相位因不等臂干涉仪m-z1的合束器bc1的反射而增加π/2,子光脉冲1022的相位因不等臂干涉仪m-z1的分束器bs1的反射而增加π/2。因此,可基于两路子光脉冲1021和1022在不等臂干涉仪m-z1的分束器bs1和合束器bc1上的相位变化而在两路子光脉冲1021和1022之间形成第二相位差0(即,φ=0)。相应地,控制器可根据由此而得到的第二相位差0而实现对两路子光脉冲1021和1022的相位编码。
22.在图3示出的光脉冲调制过程中,控制器还可通过光源x2向不等臂干涉仪m-z2输出光脉冲1030,光脉冲1030可被不等臂干涉仪m-z2分成两路子光脉冲1031和1032,其中,子光脉冲1031可从不等臂干涉仪m-z2的分束器bs2进入到不等臂干涉仪m-z2的长臂l3中并且沿着不等臂干涉仪m-z2的长臂l3经由相位调制器pm传输至不等臂干涉仪m-z2的合束器bc2,子光脉冲1032可从不等臂干涉仪m-z2的分束器bs2进入到不等臂干涉仪m-z2的短臂l4中并且沿着不等臂干涉仪m-z2的短臂l4传输至不等臂干涉仪m-z2的合束器bc2。在上述传输过程中,子光脉冲1031的相位除了因不等臂干涉仪m-z2的分束器bs2和合束器bc2的反射而增加π之外,还因相位调制电压引起的相位差而增加π/2;子光脉冲1032的相位因不等臂干涉仪m-z2的分束器bs2和合束器bc2的透射而并未发生变化。因此,可基于两路子光脉冲1031和1032在不等臂干涉仪m-z2的分束器bs2和合束器bc2上的相位变化以及由相位调制电压引起的相位差而在两路子光脉冲1031和1032之间形成第三相位差3π/2(即,φ=3π/2)。相应地,控制器可根据由此而得到的第三相位差3π/2而实现对两路子光脉冲1031和1032的相位编码。
23.此外,在图3示出的光脉冲调制过程中,控制器还可通过光源x3向不等臂干涉仪m-z2输出光脉冲1040,光脉冲1040可被不等臂干涉仪m-z2分成两路子光脉冲1041和1042,其中,子光脉冲1041可从不等臂干涉仪m-z2的分束器bs2进入到不等臂干涉仪m-z2的长臂l3中并且沿着不等臂干涉仪m-z2的长臂l3经由相位调制器pm传输至不等臂干涉仪m-z2的合束器
bc2,子光脉冲1042可从不等臂干涉仪m-z2的分束器bs2进入到不等臂干涉仪m-z2的短臂l4中并且沿着不等臂干涉仪m-z2的短臂l4传输至不等臂干涉仪m-z2的合束器bc2。在上述传输过程中,子光脉冲1041的相位除了因不等臂干涉仪m-z2的合束器bc2的反射而增加π/2之外,还因相位调制电压引起的相位差而增加π/2;子光脉冲1042的相位因不等臂干涉仪m-z2的分束器bs2的反射而增加π/2。因此,可基于两路子光脉冲1041和1042在不等臂干涉仪m-z2的分束器bs2和合束器bc2上的相位变化以及由相位调制电压引起的相位差而在两路子光脉冲1041和1042之间形成第四相位差π/2(即,φ=π/2)。相应地,控制器可根据由此而得到的第四相位差π/2而实现对两路子光脉冲1041和1042的相位编码。
24.应当理解,尽管图3示出了使用本实用新型的用于量子通信的相位编码装置进行相位编码的光脉冲调制示意图,但是图3所示出的相位编码过程仅仅是示意性的。本实用新型并不限于此。
25.此外,本实用新型还可提供一种包括本实用新型的用于量子通信的相位编码装置的量子通信设备(诸如,量子密钥分发系统的发射端)。
26.本实用新型所提供的相位编码装置和量子通信设备能够在无需切换光源且相位调制器仅需加载一种相位调制电压的情况下提供系统所需的四种相位编码,这样不仅能够有效地避免因相位调制器在四种不同的相位调制电压之间来回反复切换而导致相位调制器所加载的相位调制电压不稳定的问题,而且还能够进一步提升系统成码的速率。
27.尽管已参照优选实施例表示和描述了本技术,但本领域技术人员应该理解,在不脱离由权利要求限定的本技术的精神和范围的情况下,可以对这些实施例进行各种修改和变换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1