选通摄像头、具有这种选通摄像头的机动车和操作这种选通摄像头的方法与流程
本发明涉及一种选通/门控(gated)摄像头、一种具有这种选通摄像头的机动车和一种操作这种选通摄像头的方法。
背景技术:
1、在已知的选通摄像头和/或已知的选通摄像头操作方法中浪费了许多能量、尤其是呈光脉冲光子形式的能量,因为组成部件未经过调整、尤其是照明装置未经过调整。
2、为了改善选通摄像头,可采用光敏度更高的光学传感器和/或光敏度更高的物镜。此时不利的是,选通摄像头的这些组成部件的光敏度设计得越高,则越庞大且昂贵。替代地或附加地,光强更高的照明装置被用于改善选通摄像头。此时不利的是照明装置的光强设计得越高,则越庞大且昂贵。
技术实现思路
1、本发明的任务是提供一种选通摄像头、一种具有这种选通摄像头的机动车和一种用于操作这种选通摄像头的方法,其中,至少部分消除、优选避免所述缺点。
2、如此完成该任务,即,提供本技术教导,尤其是独立权利要求的以及在从属权利要求和说明书中公开的实施方式的教导。
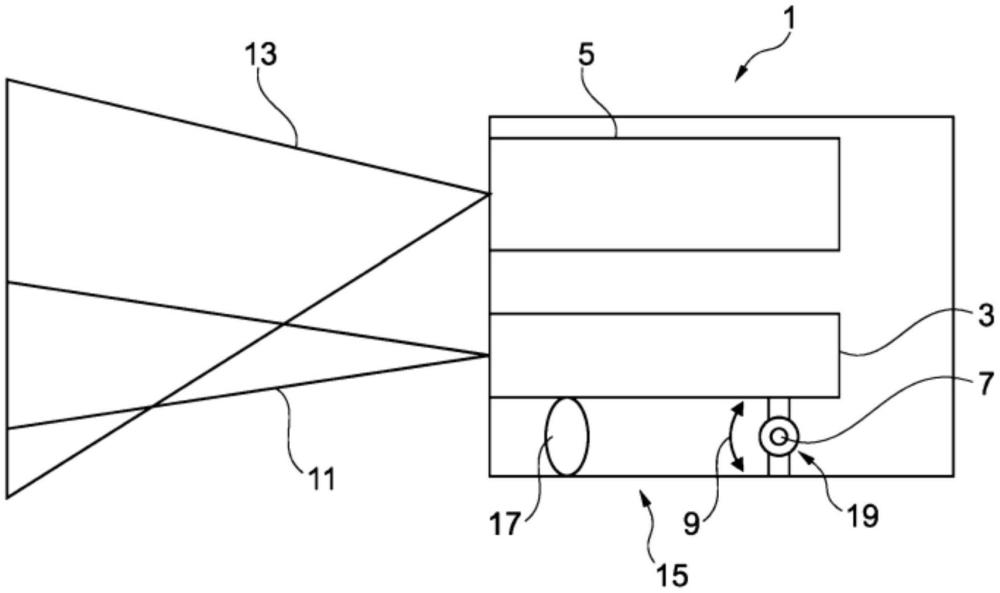
3、尤其如此完成该任务,即,提供一种选通摄像头,它具有至少一个照明装置和光学传感器。该至少一个照明装置具有至少一个自由度,使得该至少一个照明装置关于至少一个旋转轴线相对于光学传感器可转动地安装。
4、因此有利地可以借助至少一个照明装置来照明物侧场景的用户规定区域并因此借助选通摄像头采集物侧场景的用户规定区域。除此之外,还可以有利地减小该至少一个照明装置的孔径角,以便因此将至少一个照明装置的照明光锥对准物侧场景的用户规定区域。因此可以有利地将该至少一个照明装置设计成比传统的照明装置更小且成本更低。或者,至少一个照明装置的光线强度可以借助减小孔径角来提高。因此,于是可有利地提高选通摄像头的检测精度。
5、在本技术教导的上下文中,传统的照明装置如此布置在选通摄像头中,即,其相对于光学传感器不可位移。传统照明装置的孔径角因此决定了物侧场景的可照明区域。
6、借助选通摄像头,尤其通过照明装置与光学传感器的相互时间协调控制执行图像产生方法。这种方法尤其是被称为选通成像法的方法,特别是光学传感器是仅在特定的有限时间范围内切换至敏感(这被称为“选通控制”)的摄像头。至少一个照明装置在时间上也仅按特定所选间隔期被相应控制以照明物侧场景、特别是可见距离区域。
7、至少一个照明装置尤其设立用于发射预定数量的光脉冲,光脉冲持续时间最好在5ns到20ns之间。此外,尤其如此设立光学传感器,即,光学传感器曝光的开始和结束是与发出的光脉冲的数量和持续时间及照明的开始相关联的。因此,一定的可见距离区域可通过至少一个照明装置以及光学传感器两者的时间控制而按照相应规定的空间位置、即尤其是在可见距离区域的近边界和远边界距所述光学传感器的一定距离处通过该光学传感器来测定。从选通摄像头结构中知道光学传感器和至少一个照明装置的空间位置。此外,在至少一个照明装置与光学传感器之间的空间距离优选是已知的,并且与至少一个照明装置或光学传感器距可见距离区域的距离相比,这一空间距离小。因此在本技术教导的上下文中,光学传感器与可见距离区域之间的距离等于选通摄像头与可见距离区域之间的距离。
8、可见距离区域在此是三维空间内的(物侧)区域,其通过将至少一个照明装置的光脉冲的数量和持续时间以及照明的开始与光学传感器曝光的开始和结束相关联而借助该光学传感器被成像在光学传感器图像平面上的二维图像中。
9、就在此和以下提到的“物侧”而言是指真实空间中的区域。就在此和以下提到“像侧”而言是指光学传感器图像平面上的区域。在此,可见距离区域存在于物侧。它们对应于通过成像定律和至少一个照明装置和光学传感器的时间控制而对应在图像平面上的像侧区域。
10、根据在借助至少一个照明装置的照明开始之后的光学传感器曝光的开始和结束,光脉冲光子照中光学传感器。可见距离区域离至少一个照明装置和光学传感器越远,在该距离区域内反射的光子照中光学传感器之前的持续时间越长。在此,可见距离区域距该至少一个照明装置和光学传感器越远,在照明结束与曝光开始之间的时间差越大。
11、该至少一个照明装置在一个优选设计中具有至少一个表面发射器、尤其是所谓的vcse激光器。替代地或附加地,该光学传感器最好是摄像头。
12、该至少一个旋转轴线优选正交于机动车行驶方向且平行于机动车所行驶的道路来取向。
13、在一个优选设计中规定将选通摄像头用在机动车、尤其是卡车、尤其是自主驾驶卡车中,用以照明距离最多为100米的、高度最高为1米的目标。另外,该至少一个旋转轴线最好正交于机动车行驶方向且平行于机动车所行驶的道路来取向。因此,可见距离区域的远边界最好距光学传感器最多100米。在静态场景中且尤其是在道路具有水平走势的情况下,因此存在该至少一个照明装置的约为0.6°的竖向最小孔径角αmin。在动态场景中,为了进一步计算竖向孔径角αfix而优选假定,机动车在全制动情况下具有最多为1°的倾斜角γn。还假定,道路的道路坡度β能基于水平走向以最多1.5°改变。在考虑这些框架条件和安装角度μ的情况下,对于传统的照明装置,如下得出竖向孔径角αfix:
14、αfix=αmin+2β+γn-μ=4.6°-μ (1)
15、优选地,安装角度μ为至少0°到至多0.5°。对于具有至少一个可绕水平旋转轴线相对于光学传感器转动安装的照明装置的选通摄像头,不需要遵守与倾斜角度γn、道路坡度β和安装角度μ相关的在先框架条件,因为至少一个照明装置可以借助绕旋转轴线转动而适配于这些框架条件。在本发明的选通摄像头中增加0.4°安全角度范围的情况下,有利地可以将至少一个照明装置的效率提升4倍。尤其是,优选可以通过减小照明光锥的竖向孔径角而将照明光锥内的光脉冲光子密度提升至少4倍。或者,优选可以在光脉冲光子密度保持不变的情况下将照明光锥内的光脉冲光子数量减小4倍。
16、在本技术教导的上下文中,术语“道路坡度”是指道路上坡以及下坡。
17、在另一个优选设计中,该旋转轴线最好正交于道路来取向。根据尤其在右转弯或左转弯时的道路曲率,优选可以将所述至少一个可转动的照明装置的水平孔径角选择为比传统照明装置的水平孔径角小2倍。
18、本发明的一个改进方案规定,选通摄像头具有运动装置,运动装置设立用于使至少一个照明装置绕至少一个旋转轴线相对于光学传感器转动。有利地,可借助运动装置实现物侧场景的用户规定区域的动态照明。
19、在一个优选实施方式中,该运动装置具有致动器和接头(gelenk),其中,所述致动器和接头如此连接至该至少一个照明装置,即,照明装置借助与接头相结合的致动器的长度变化而可转动。
20、在一个替代优选实施方式中,该运动装置具有致动器和杆,其中,该杆沿该旋转轴线延伸,其中,该至少一个照明装置安置在该杆上并且该致动器设立用于使杆转动。因此该至少一个照明装置在借助致动器使杆转动时被转动。
21、本发明的一个改进方案规定,该至少一个照明装置可绕两个旋转轴线相对于光学传感器转动地安装。两个旋转轴线中的第一旋转轴线和两个旋转轴线中的第二旋转轴线优选相互正交取向。因此有利地可以使该至少一个照明装置在两个方向上转动。因此,照明光锥的竖向孔径角和水平孔径角优选可以改变,因此还提升该至少一个照明装置的效率。
22、在一个优选设计中,选通摄像头、尤其是运动装置具有用于使至少一个照明装置转动的两个致动器。尤其是该运动装置设计成双轴云台系统。
23、本发明的一个改进方案规定,选通摄像头具有第一照明装置和第二照明装置作为所述至少一个照明装置。第一照明装置和第二照明装置如此相互关联,即,它们同时绕各相应的至少一个旋转轴线相对于光学传感器可转动。
24、在一个优选设计中,第一照明装置可绕第一“第一旋转轴线”转动,第二照明装置可绕第二“第一旋转轴线”转动。此外,第一“第一旋转轴线”和第二“第一旋转轴线”最好彼此平行取向,尤其优选的是第一“第一旋转轴线”和第二“第一旋转轴线”相同。
25、在另一个优选设计中,第一照明装置和第二照明装置两者都关于各自第一旋转轴线和各自第二旋转轴线相对于光学传感器可转动地安装。优选地,第一照明装置可绕第一“第一旋转轴线”和第一“第二旋转轴线”转动。还优选的是,第二照明装置可绕第二“第一旋转轴线和第二“第二旋转轴线”转动。另外,第一“第一旋转轴线”和第二“第一旋转轴线”优选相互平行取向,尤其优选的是第一“第一旋转轴线”和第二“第一旋转轴线”相同。替代地或附加地,第一“第二旋转轴线”和第二“第二旋转轴线”相互平行取向,尤其优选的是第一“第二旋转轴线”和第二“第二旋转轴线”相同。
26、在另一个优选设计中,第一照明装置可绕第一“第一旋转轴线”和第一“第二旋转轴线”转动。此外,第二照明装置优选可绕第二“第一旋转轴线”和第二“第二旋转轴线”转动。另外,第一“第一旋转轴线”和第二“第一旋转轴线”最好相同。替代地或附加地,第一“第二旋转轴线”和第二“第二旋转轴线”彼此间隔且相互平行取向。
27、在一个尤其优选的设计中,第一照明装置可绕第一“第一旋转轴线”和第一“第二旋转轴线”转动。此外,第二照明装置优选可绕第二“第一旋转轴线”和第二“第二旋转轴线”转动。另外,第一“第一旋转轴线”和第二“第一旋转轴线”最好相同且正交于机动车行驶方向且平行于道路来取向。替代地或附加地,第一“第二旋转轴线”和第二“第二旋转轴线”按照正交于道路、彼此间隔且相互平行的方式来取向。
28、也如此完成该任务,即,提供一种控制装置,其设立用于根据至少一个参数来设定且最好是调节根据本发明的选通摄像头或根据其中一个或多个前述实施方式的选通摄像头的至少一个照明装置关于至少一个旋转轴线的转动、尤其是转动角度。该控制装置优选设计成计算装置、尤其优选是计算机或者控制设备、尤其是机动车的控制设备。关于控制装置尤其有已经关于选通摄像头所解释的优点。
29、控制装置优选设立用于与选通摄像头、尤其是所述至少一个照明装置和光学传感器有效连接并且设立用于其各自控制。另外,控制装置优选设立用于与运动装置有效连接且设立用于其控制。
30、也如此完成该任务,即,提供一种选通摄像头装置,其具有根据本发明的选通摄像头或根据其中一个或多个前述实施方式的选通摄像头以及根据本发明的控制装置或根据其中一个或多个前述实施方式的控制装置。关于选通摄像头装置尤其有已经关于选通摄像头和控制装置所解释的优点。
31、在一个优选设计中,选通摄像头装置还具有该运动装置。
32、该控制装置最好有效连接至选通摄像头、尤其是所述至少一个照明装置和光学传感器并且设立用于其各自控制。另外,该控制装置最好有效连接至运动装置且设立用于其控制。
33、也如此完成该任务,即,提供一种机动车,其具有根据本发明的选通摄像头或根据其中一个或多个前述实施方式的选通摄像头和控制装置。该控制装置设立用于根据至少一个参数设定该至少一个照明装置关于该至少一个旋转轴线的转动、尤其是转动角度。或者,机动车具有根据本发明的选通摄像头或根据其中一个或多个前述实施方式的选通摄像头装置。关于机动车尤其有已经关于选通摄像头所解释的优点。
34、优选地,该至少一个参数选自以下组,该组由机动车俯仰角、机动车偏航角、道路坡度和道路曲率组成。
35、在一个优选设计中,机动车被设计成自主驾驶机动车。替代地或附加地,机动车优选设计为卡车。但也可能的是将机动车设计为轿车、乘用车辆或其它机动车。
36、也如此完成该任务,即,提供一种用于操作机动车内的根据本发明的选通摄像头或根据其中一个或多个前述实施方式的选通摄像头的方法。在此,所述机动车和/或道路的至少一个参数被确定,其中,基于该至少一个参数来设定和/或调节该至少一个照明装置关于该至少一个旋转轴线的转动、尤其是转动角度。与方法相关地尤其有已经关于所述选通摄像头、控制装置、选通摄像头装置和机动车所解释的优点。有利地,可以借助该方法基于该至少一个参数使所述至少一个照明装置的取向动态适配于道路和/或机动车。
37、本发明的一个改进方案规定,该至少一个参数选自以下组,该组由机动车俯仰角、机动车偏航角、道路坡度和道路曲率组成。
38、本发明的一个改进方案规定,如此选择第一旋转轴线,即,其正交于机动车行驶方向且平行于道路来取向。
39、本发明的一个改进方案规定,如此选择第二旋转轴线,即,其正交于道路来取向。
40、本发明的一个改进方案规定,所述至少一个照明装置根据机动车俯仰角和/或道路坡度以第一转动角度关于第一旋转轴线被转动。替代地或附加地,所述至少一个照明装置根据机动车偏航角和/或道路曲率以第二转动角度关于第二旋转轴线被转动。
- 还没有人留言评论。精彩留言会获得点赞!