一种基于二维码映射的无人机快速识别系统和方法
本发明涉及无人机识别,具体是一种基于二维码映射的无人机快速识别系统和方法。
背景技术:
1、无人机最早应用于军事领域,后凭借其体积小、重量轻和成本低等优点,被广泛应用于民用领域。随着无人机应用范围增大以及“黑飞”现象日益严重,政府一方面要通过社会媒体、公共平台提高安全规范使用无人机的宣传力度,从而增强人们对无人机的安全和法制观念,创造一个遵纪守法使用无人机的社会环境,另一方面也迫切需要在技术上加强对违规无人机的反制管理。无人机的信号识别是对其进行反制与管理的重要前提,也是当前的一个研究热点,对于无人机反制领域具有重大意义和应用前景。
2、文献(李光伟.频谱探测技术在无人机探测与反制领域的应用[j])总结了电磁频谱测量技术在无人机探测和反制中的应用和前景,并给出了几种检测方法,但没有具体算法验证。文献(刘丽.民用无人机跳频信号分析与识别技术研究[d])提出了一种跳频信号的分类系统,可以实现对无人机跳频信号进行自动分类,但是该方法需要大量无人机样本数据,并且算法较复杂。
3、二维码技术已广泛应用于生产和生活的各个方面,例如生产线零件自动追踪、产品溯源、医疗急救、电子商务、传媒旅游等。但上述二维码应用均集中在记录数字、字母和文字,如何利用二维码的快速响应特点,将二维码用于时频谱图的映射及存储以实现无人机型号的快速识别具有重要的研究意义。
技术实现思路
1、本发明的目的在于提供一种基于二维码映射的无人机快速识别系统和方法,摆脱了传统的单一线性时频变换或非线性时频变换描述信号特征的局限性。
2、为了实现上述目的,本发明采用以下技术方案予以实现:
3、一种基于二维码映射的无人机快速识别系统,包括无人机、遥控站和监测装置,其中:无人机向地面遥控站传输图传信号,遥控站向无人机发射遥控信号,监测装置收集遥控信号和图传信号。
4、一种基于二维码映射的无人机快速识别方法,包括如下步骤:
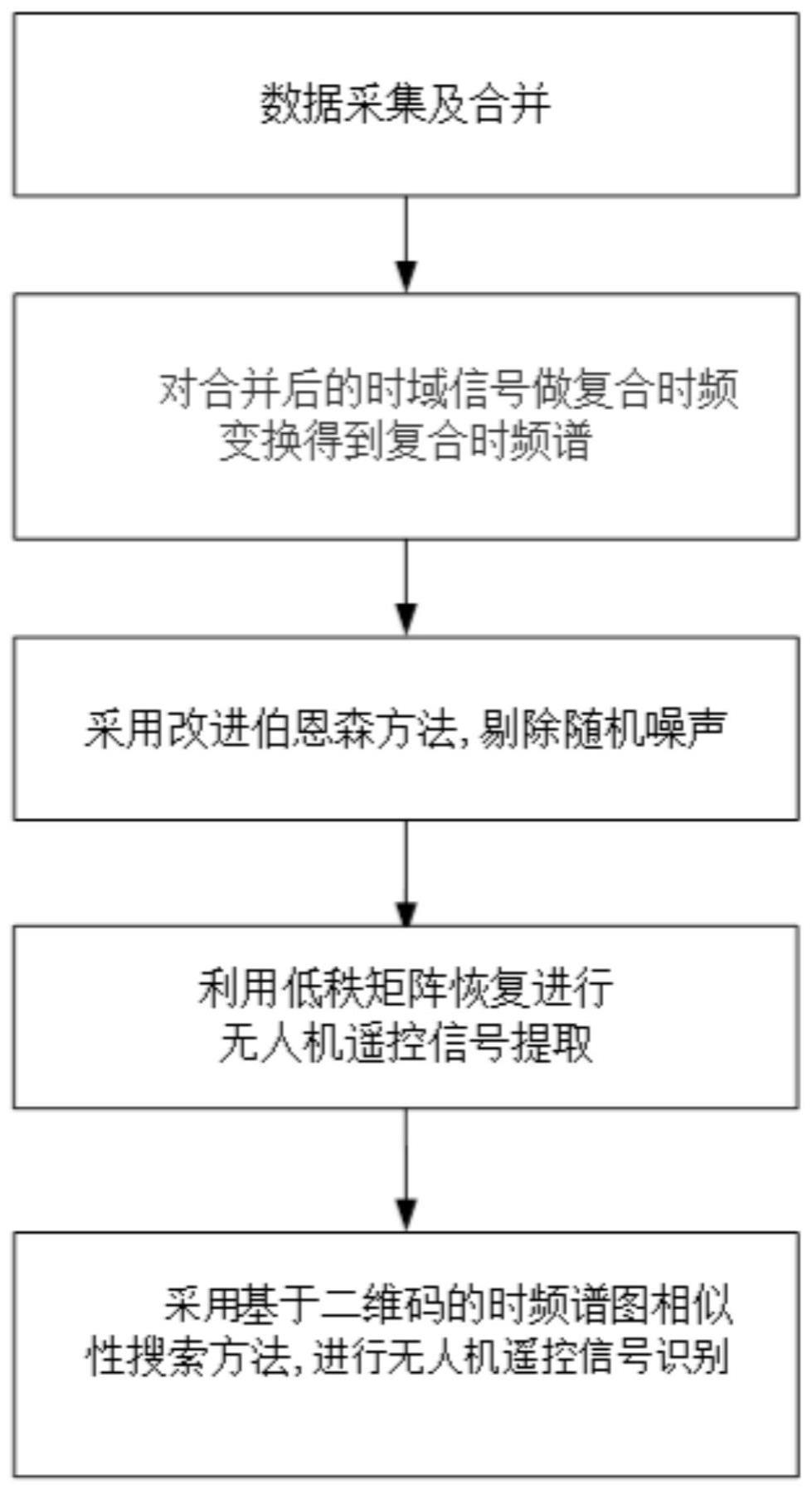
5、步骤1、数据采集及合并
6、利用数据采集系统对无人机型号进行采集,并对接收的模拟信号进行模数转换,通过正交解调、数字下变频将接收信号转换为同相分量i和正交分量q两路数字基带信号,然后将i、q两路信号进行合并,得到时域信号,表示为:
7、sig=i+j·q (1)
8、式中,q和j表示虚数单位,
9、步骤2、对合并后的时域信号做得到复合时频
10、先对合并后的时域信号进行维纳wvd变换,得到时频谱tfrwvd,再对合并后的时域信号进行gabor变换,得到时频谱tfrg,然后将tfrg结果进行二值化处理,得到自项时频谱,表示为:
11、
12、式中,t表示时间,f表示频率,max|tfrg()|表示求元素的最大值,||表示求绝对值,ε为阈值,且ε=μ·mean(|tfrg(t,f)|),μ为阈值因子,取μ=0.15;mean()表示求均值;
13、将自项时频谱与时频谱tfrwvd进行基本积,得到复合时频谱,表示为:
14、tfr复合(t,f)=tfr自项(t,f)◎tfrwvd(t,f)(3)
15、式中,◎是基本积运算;
16、步骤3、剔除随机噪声
17、根据随机噪声的幅度通常弱于无人机信号的特点,通过设定能量阈值从而消除随机噪声对遥控信号检测的影响;
18、步骤4、无人机遥控信号提取
19、根据在时频域上遥控信号与图传信号相关性存在的差异,利用低秩矩阵恢复的方法将相关性较强部分分配到低秩矩阵中,而稀疏矩阵中存放相关性弱的部分,由于图传信号在带宽范围内是连续存在的,而遥控信号在时频域上是一条频率随时间变化的阶梯状斜线,因此大部分的图传信号分在低秩矩阵中,遥控信号被分在稀疏矩阵中,从而实现遥控信号与图传信号的分离;
20、步骤5、无人机遥控信号识别;
21、从稀疏矩阵中得到清晰的遥控信号时频表示,从而提取出遥控信号的时频谱,将时频谱映射成二维码,并将映射成的二维码与无人机遥控信号二维码库中的二维码字进行比对,利用二维码的时频谱相似性搜索方法,对提取的时频谱图特征进行识别从而判断出无人机的型号。
22、进一步地,所述步骤1的数据采集系统为基于ad9361零中频接收机架构的数据采集系统。
23、进一步地,所述步骤2还包括采用广义矩形变换对合并后的时域信号以时间为横轴,以频率为纵轴进行分析,通过对步骤1采集的num采个数据点进行分组,每组数据为num组个点,共分析num采/num组次,每次代表一个时间点,num组个点对应bw带宽内的信号频率,每一点的频率为bw/num组。
24、进一步地,所述步骤2共经过num采/num组次复合时频变换处理,每一次输出皆可得到tfr复合时频谱,再计算每组数据沿着时间轴的tfr复合时频谱最大值,将各组数据的最大值拼接起来,得到全部样本数据的tfr复合时频谱图。
25、进一步地,所述步骤3包括如下步骤:
26、步骤3.1、设定能量阈值为tfr阈值(t,f),则:
27、
28、式中:阈值采用改进的伯恩森bernsen方法,取以当前位置(t0,f0)为中心,且边长为r的方形区域内时频谱值,估计得到:
29、
30、式中,γ为降噪系数,nt为时域样点数,nf为频域样点数;
31、步骤3.2、设降噪系数γ∈[0,1],以0.1的步长代入公式(5),得到不同降噪系数对应的阈值;对tfr(t,f)进行二值处理,根据公式(6)统计每个阈值降噪后能量值大于0的点的数目:
32、
33、式中,tot(tfr(t,f))表示降噪处理后的时频谱图中能量大于0的点tfr(t,f)的总数;
34、步骤3.3、采用二次差分对两个邻近的频谱矩阵单元的数值进行对比,得出其一次差分结果,设为dif(tfr(t,f)),则:
35、dif(tfr(t,f))=tfr(t,f)-tfr(t-1,f-1) (7)
36、对公式(7)再做一次差分处理,记为dif(dif(tfr(t,f))),则:
37、dif(dif(tfr(t,f)))=dif(tfr(t,f))-dif(tfr(t-1,f-1)) (8)
38、最优降噪系数为序列dif(dif(tfr(t,f)))的最大峰值所对应的值,将其带入公式(5),即可求出最优降噪阈值。
39、进一步地,所述步骤4中的低秩矩阵恢复包括先将时频谱矩阵tfr(t,f)表示为低秩矩阵a与稀疏矩阵e之和,再通过求解范数优化问题恢复低秩矩阵,即求解下列最优化问题:
40、
41、式中,mina,erank()表示针对低秩矩阵a和稀疏矩阵e求最小值,s.t.表示约束条件,rank()表示求秩,||||0表示求0范数,λ为平衡因子,取nt为时域样点数,nf为频域样点数,用快速矩阵分解算法求解公式(9),得到稀疏矩阵e。
42、进一步地,所述步骤4中的快速矩阵分解算法的过程如下:
43、步骤4.1、将最优化问题公式(9)正则化,便得到优化问题公式(10),表示为:
44、
45、式中,‖‖1为1范数,‖‖1.2为(1,2)范数,为f范数的平方,其中,δ=‖tfr(t.f‖2/1.5,其为对不满足线性等式约束的惩罚因子,是背景先验知识诱导核范数,ρ是低秩矩阵a秩的初始预估计值,取ρ=10,平衡参数一平衡参数二β=0.5×‖tfr(t.f)‖2;
46、步骤4.2、迭代交替更新矩阵a,e:
47、当a=k时,则:
48、
49、当e=k时,则:
50、
51、式中,k代表迭代次数;
52、当达到最大迭代次数15次或误差时,迭代结束,得到稀疏矩阵e。
53、进一步地,所述步骤5的时频特征谱映射成二维码的过程如下:
54、步骤5.1.1、数据压缩
55、将时频谱彩色图转换为灰度图,将时频谱图存储在qr码内;
56、步骤5.1.2、qr码生成
57、选择码元版本≥30的qr码以存储足够的数据,码元是指构成qr码的方形黑白点。
58、进一步地,所述步骤5采用基于二维码的时频谱相似性搜索方法对提取的时频谱图特征进行识别,从而判断出无人机的机型的具体步骤如下:
59、步骤5.2.1、设置初始纠错级别为最低级l;
60、步骤5.2.2、在无人机遥控信号映射的二维码库库中搜寻到相应的二维码,如果是,转步骤5.2.3,如果否,则转步骤5.2.4;
61、步骤5.2.3、步骤5.2.2搜寻到相应的二维码确定为所求的无人机映射的二维码,即识别出对应无人机型;
62、步骤5.2.4、纠错率级别+1;
63、步骤5.2.5、判断纠错率级别是否大于最高级,如果否,则转步骤5.2.2;如果是,则到步骤5.2.6;
64、步骤5.2.6、舍弃该二维码,即未找到对应无人机型。
65、本发明具有如下有益效果:
66、本发明基于复合时频变换的无人机采集信号时频变换方法,采用garbo线性时频变换与wvd非线性时频变换的复合时频变换,即将garbo变换得到的时频谱与wvd变换得到的时频谱进行基本积,利用gabor变换和wvd变换之间的滤波互消效应,抑制产生的交叉项的同时提高时频谱的分辨率,摆脱了单一的线性时频变换或非线性时频变换的局限性,以兼顾时频分辨率和克服干扰。
67、本发明采用基于低秩矩阵恢复时频滤波方法,采用复合变换将无人机信号变换到时频域上,然后依据遥控信号与图传信号在时频域上能量分布的相关性的差异,通过低秩矩阵恢复方法将遥控信号与图传信号分到稀疏矩阵和低秩矩阵中,从而分离遥控信号与图传信号,降低图传信号对遥控信号的干扰;基于二次差分的自适应降噪阈值估计,可以获得最优降噪阈值,有效抑制噪声。
68、本发明基于二维码的时频谱相似性搜索方法,通过映射的二维码将时频谱图的相似性估计转化为二维码的相似搜索,识别速度快,简洁有效,且二维码便于存储大容量数据,能够实现精准识别。
- 还没有人留言评论。精彩留言会获得点赞!