用于点云数据的点云块数据单元编码和解码的制作方法
本公开内容一般涉及点云译码,并且具体涉及用于点云译码的高级语法。
背景技术:
1、点云被应用于各种应用,包括娱乐行业、智能汽车导航、地理空间检查、真实世界对象的三维(three dimensional,3d)建模、可视化等。考虑到点云的非均匀采样几何形状,用于存储和传输这样的数据的紧凑表示是有用的。与其他3d演示相比,不规则点云更通用,并且适用于更广泛的传感器和数据采集策略。例如,当在虚拟现实世界中执行3d演示或在远程呈现环境中执行远程渲染时,虚拟人物的渲染和实时指令被处理为密集点云数据集。
技术实现思路
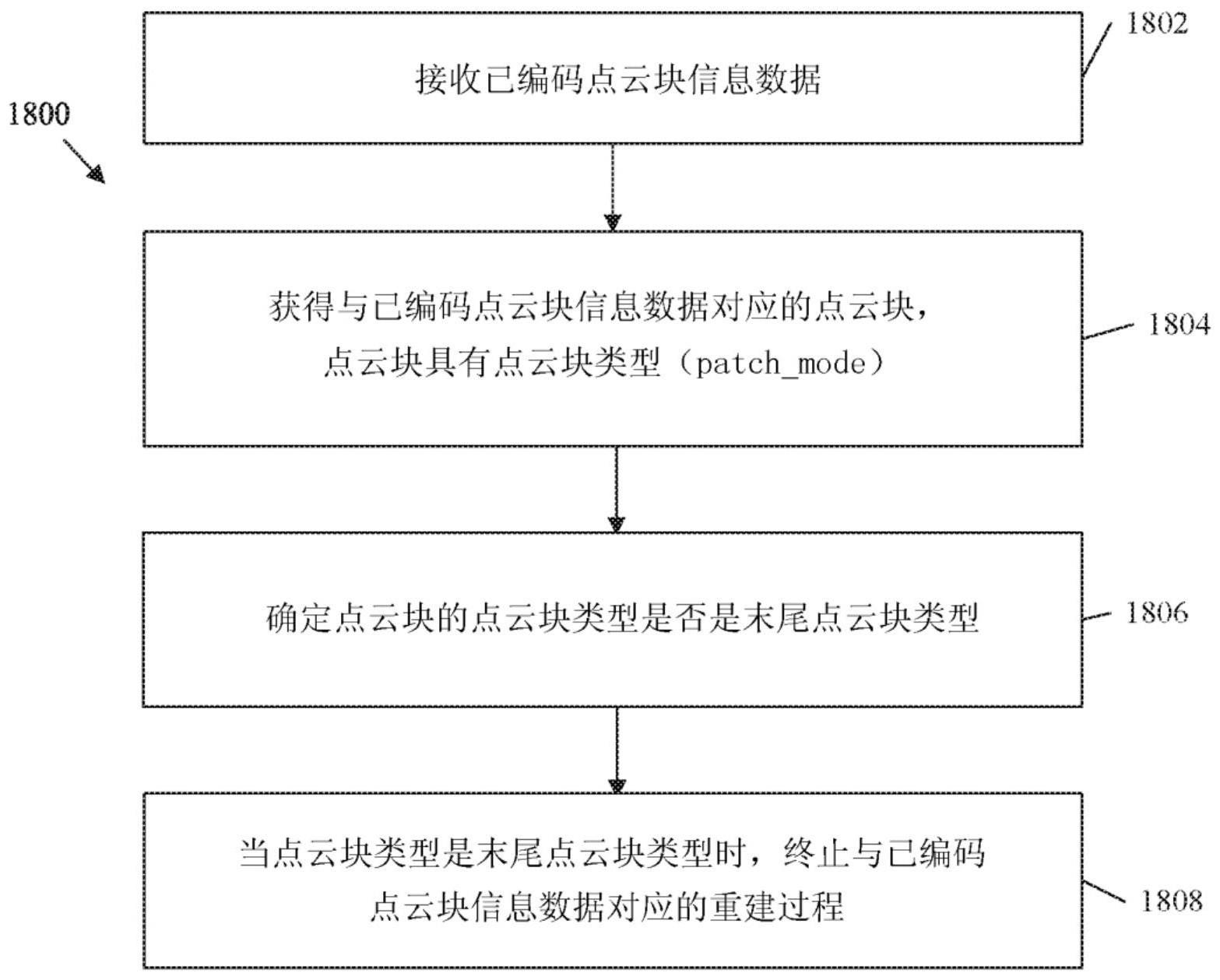
1、第一方面涉及一种由解码器实现的点云解码(point cloud coding,pcc)的方法。该方法包括:由解码器的接收器接收已编码点云块信息数据;由解码器的处理器获得与已编码点云块信息数据对应的点云块,该点云块具有点云块类型(patch_mode);由处理器确定点云块的点云块类型是否为末尾点云块类型;以及当点云块类型为末尾点云块类型时,由处理器终止与已编码点云块信息数据对应的重建过程。
2、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(skip patch data unit type,spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pulse coded modulation,pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
3、第二方面涉及一种由解码器实现的点云解码(pcc)的方法。该方法包括:由解码器的接收器接收已编码点云块信息数据;由解码器的处理器获得与已编码点云块信息数据对应的点云块,该点云块具有点云块类型(patch_mode);由处理器确定点云块的点云块类型是否为跳过点云块类型;当点云块类型为跳过点云块类型时,由处理器对与点云块对应的参考点云块索引(spdu_patch_index)进行解码;当点云块类型为跳过点云块类型时,由处理器基于与点云块对应的参考帧索引([reffrmidx])和解码的参考点云块索引,确定点云块的参考索引(refidx);以及当点云块类型为跳过点云块类型时,由处理器基于确定的参考索引来重建点云块的体积表示。
4、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
5、在根据第二方面本身的方法的第一实现形式中,该方法还包括:确定点云块的点云块类型为帧内点云块类型;基于与点云块对应的帧索引([frmidx])和递减的点云块索引确定点云块的参考索引(refidx);使用与点云块对应的二维(two dimensional,2d)分量和与点云块对应的三维(3d)分量来对点云块进行解码;以及基于解码的点云块来重建体积表示。
6、在根据第二方面本身或第二方面的任何前述实现形式的方法的第二实现形式中,该方法还包括:确定点云块的点云块类型是帧间点云块类型;对与点云块对应的第二参考点云块索引(dpdu_patch_index)进行解码;基于与点云块对应的参考帧索引([reffrmidx])和解码的第二参考点云块索引,确定点云块的参考索引(refidx);使用与点云块对应的二维(2d)分量和与点云块对应的三维(3d)分量来对点云块进行解码;以及基于解码的点云块重建体积表示。
7、在根据第二方面本身或第二方面的任何前述实现形式的方法的第三实现形式中,该方法还包括:确定点云块的点云块类型是脉冲编码调制(pcm)点云块类型;基于与点云块对应的帧索引([frmidx])和递减的点云块索引确定点云块的参考索引(refidx);使用与点云块对应的关于独立点的二维(2d)分量和与点云块对应的关于独立点的三维(3d)分量来对点云块进行解码;以及基于解码的点云块重建体积表示。
8、在根据第二方面本身或第二方面的任何前述实现形式的方法的第四实现形式中,该方法还包括:接收与已编码点云块信息数据对应的输入,其中,该输入包括点云块模式、点云块索引、参考索引、帧索引和参考帧索引中的一者或更多者。
9、在根据第二方面本身或第二方面的任何前述实现形式的方法的第四实现形式中,该方法还包括:在电子设备的显示器上显示基于重建的体积表示生成的图像。
10、第三方面涉及一种由解码器实现的点云解码(pcc)的方法。该方法包括:由解码器的接收器接收已编码点云块信息数据;由解码器的处理器获得与已编码点云块信息数据对应的点云块,该点云块具有点云块类型(patch_mode);由处理器确定点云块的点云块类型是否为跳过点云块类型;当点云块类型为跳过点云块类型时,由处理器对与点云块对应的参考点云块索引(spdu_patch_index)进行解码;当点云块类型为跳过点云块类型时,由处理器基于与点云块对应的参考帧索引([reffrmidx])和解码的参考点云块索引,确定点云块的参考索引(refidx);当点云块类型为跳过点云块类型时,由处理器基于确定的参考索引来重建点云块的体积表示;由处理器确定更多点云块可用标志是具有第一值还是第二值;当更多点云块可用标志具有第一值时,在解码器的存储器中存储重建的体积表示;以及当更多点云块可用标志具有第二值时,由处理器终止已编码点云块信息数据的重建过程。
11、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
12、在根据第三方面本身的方法的第一实现形式中,该方法还包括:确定点云块的点云块类型为帧内点云块类型;基于与点云块对应的帧索引([frmidx])和递减的点云块索引确定点云块的参考索引(refidx);使用与点云块对应的二维(2d)分量和与点云块对应的三维(3d)分量来对点云块进行解码;以及基于解码的点云块来重建体积表示。
13、在根据第三方面本身的方法的第二实现形式中,该方法还包括:确定点云块的点云块类型为帧间点云块类型;对与点云块对应的第二参考点云块索引(dpdu_patch_index)进行解码;基于与点云块对应的参考帧索引([reffrmidx])和解码的第二参考点云块索引,确定点云块的参考索引(refidx);使用与点云块对应的二维(2d)分量和与点云块对应的三维(3d)分量来对点云块进行解码;以及基于解码的点云块来重建体积表示。
14、在根据第三方面本身的方法的第三实现形式中,该方法还包括:确定点云块的点云块类型是脉冲编码调制(pcm)点云块类型;基于与点云块对应的帧索引([frmidx])和递减的点云块索引来确定点云块的参考索引(refidx);使用与点云块对应的关于独立点的二维(2d)分量和与点云块对应的关于独立点的三维(3d)分量来对点云块进行解码;以及基于解码的点云块来重建体积表示。
15、在根据第三方面本身的方法的第四实现形式中,该方法还包括:接收与已编码点云块信息数据对应的输入,其中,该输入包括点云块模式、点云块索引、参考索引、帧索引和参考帧索引中的一者或更多者。
16、在根据第三方面本身的方法的第五实现形式中,该方法还包括:在电子设备的显示器上显示基于重建的体积表示生成的图像。
17、第四方面涉及一种由编码器实现的点云编码(pcc)的方法。该方法包括:由编码器的接收器获得点云块帧数据单元(pfdu),该点云块帧数据单元用于标识多个点云块中的每一个的点云块类型(pdfu_patch_mode);由编码器的处理器确定来自多个点云块的点云块的点云块类型是否为末尾点云块类型;当点云块类型不是末尾点云块类型时,由编码器的处理器对点云块的点云块信息数据进行编码,该点云块信息数据包括点云块的点云块类型;以及当点云块类型被设置为末尾点云块类型时,由编码器的处理器对点云块的点云块信息数据进行编码,该点云块信息数据包括点云块的末尾点云块类型。
18、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
19、在根据第四方面本身的方法的第一实现形式中,点云块类型是跳过点云块类型、帧间点云块类型、帧内点云块类型和脉冲编码调制(pcm)点云块类型之一。
20、在根据第四方面本身的方法的第二实现形式中,点云块帧数据单元包括帧索引(frmidx)、与点云块对应的二维(2d)分量和与点云块对应的三维(3d)分量。
21、在根据第四方面本身的方法的第三实现形式中,点云块信息数据包括帧索引、与点云块对应的二维(2d)分量和与点云块对应的三维(3d)分量。
22、在根据第四方面本身的方法的第四实现形式中,该方法还包括对以下步骤进行迭代:确定点云块类型是否是末尾点云块类型;以及对来自多个点云块的后续点云块的点云块信息数据进行编码,直到来自多个点云块的点云块之一被确定为具有末尾点云块类型。
23、在根据第四方面本身的方法的第五实现形式中,该方法还包括:在所有点云块信息数据已经被编码之后执行字节对齐。
24、在根据第四方面本身的方法的第六实现形式中,该方法还包括:在所有点云块信息数据已经被编码之后生成压缩的点云块帧数据单元。
25、在根据第四方面本身的方法的第七实现形式中,该方法还包括:在编码器的存储器中存储压缩的点云块帧数据单元以用于向解码器传输。
26、第五方面涉及一种由编码器实现的点云编码(pcc)的方法。该方法包括:由编码器的接收器获得多个点云块中的每一个的点云块帧数据单元(patch frame data unit,pfdu);由编码器的处理器向多个点云块中的每一个添加末尾点云块标志;由编码器的处理器基于末尾点云块标志的值,确定来自多个点云块的点云块的点云块类型是否为末尾点云块类型;以及当点云块类型不是末尾点云块类型时,由编码器的处理器对点云块的点云块信息数据进行编码,该点云块信息数据包括点云块的点云块类型和末尾点云块标志。
27、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
28、在根据第五方面本身的方法的第一实现形式中,点云块类型是跳过点云块类型、帧间点云块类型、帧内点云块类型和脉冲编码调制(pcm)点云块类型之一。
29、在根据第五方面本身的方法的第二实现形式中,点云块帧数据单元包括帧索引(frmidx)、与点云块对应的二维(2d)分量和与点云块对应的三维(3d)分量。
30、在根据第五方面本身的方法的第三实现形式中,点云块信息数据包括帧索引、与点云块对应的二维(2d)分量和与点云块对应的三维(3d)分量。
31、在根据第五方面本身的方法的第四实现形式中,该方法还包括对以下步骤进行迭代:基于末尾点云块标志的值确定点云块类型是否为末尾点云块类型;以及对来自多个点云块的后续点云块的点云块信息数据进行编码,直到基于末尾点云块标志的值确定来自多个点云块的点云块之一具有末尾点云块类型。
32、在根据第五方面本身的方法的第五实现形式中,该方法还包括:在基于末尾点云块标志的值确定来自多个点云块的点云块之一具有末尾点云块类型之后执行字节对齐。
33、在根据第五方面本身的方法的第六实现形式中,该方法还包括:在所有点云块信息数据已经被编码之后生成压缩的点云块帧数据单元。
34、在根据第五方面本身的方法的第七实现形式中,该方法还包括:在编码器的存储器中存储压缩的点云块帧数据单元以用于向解码器传输。
35、第六方面涉及一种解码设备,其包括:被配置成接收已编码点云块信息的接收器;耦合至接收器的存储器,该存储器存储指令;以及耦合至存储器的处理器,该处理器被配置成执行指令以使解码设备进行以下操作:获得与已编码点云块信息数据对应的点云块,该点云块具有点云块类型(patch_mode);确定点云块的点云块类型是否为末尾点云块类型;当点云块类型为末尾点云块类型时,终止与已编码点云块信息数据对应的重建过程。
36、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
37、第七方面涉及一种解码设备,其包括:被配置成接收已编码点云块信息的接收器;耦合至接收器的存储器,该存储器存储指令;以及耦合至存储器的处理器,该处理器被配置成执行指令以使解码设备进行以下操作:获得与已编码点云块信息数据对应的点云块,该点云块具有点云块类型(patch_mode);确定点云块的点云块类型是否为跳过点云块类型;当点云块类型为跳过点云块类型时,对与点云块对应的参考点云块索引(spdu_patch_index)进行解码;当点云块类型为跳过点云块类型时,基于与点云块对应的参考帧索引([reffrmidx])和解码的参考点云块索引,确定点云块的参考索引(refidx);以及当点云块类型为跳过点云块类型时,基于确定的参考索引来重建点云块的体积表示。
38、使用这种解码设备允许对点云块缓冲区中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块缓冲区中。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或完全匹配时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的列表进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块缓冲区中的点云块的整个列表。另外,译码技术消除了用信号通知点云块缓冲区中的点云块总数(例如,点云块缓冲区的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块缓冲区的末尾。因此,相对于当前的编解码器,视频译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的视频译码过程可以增强译码效率,这在发送、接收和/或查看视频时为用户提供更好的用户体验。
39、第八方面涉及一种解码设备,其包括:被配置成接收已编码点云块信息的接收器;耦合至接收器的存储器,该存储器存储指令;以及耦合至存储器的处理器,该处理器被配置成执行指令以使解码设备进行以下操作:获得与已编码点云块信息数据对应的点云块,该点云块具有点云块类型(patch_mode);确定点云块的点云块类型是否为跳过点云块类型;当点云块类型为跳过点云块类型时,对与点云块对应的参考点云块索引(spdu_patch_index)进行解码;当点云块类型为跳过点云块类型时,基于与点云块对应的参考帧索引([reffrmidx])和解码的参考点云块索引,确定点云块的参考索引(refidx);当点云块类型为跳过点云块类型时,基于确定的参考索引来重建点云块的体积表示;确定更多点云块可用标志是具有第一值还是第二值;当更多点云块可用标志具有第一值时,将重建的体积表示存储在存储器中;以及当更多点云块可用标志具有第二值时,终止已编码点云块信息数据的重建过程。
40、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
41、在根据第六、第七和第八方面本身的解码设备的第一实现形式中,解码设备还包括显示器,该显示器被配置成显示基于重建的体积表示生成的图像。
42、第九方面涉及一种编码设备,包括:被配置成接收三维(3d)图像的接收器;耦合至接收器的存储器,该存储器包含指令;耦合至存储器的处理器,该处理器被配置成执行指令以使编码设备进行以下操作:获得点云块帧数据单元(pfdu),该点云块帧数据单元用于多个点云块中的每一个的点云块类型(pdfu_patch_mode)的;确定来自多个点云块的点云块的点云块类型是否为末尾点云块类型;当点云块类型不是末尾点云块类型时,对点云块的点云块信息数据进行编码,点云块信息数据包括该点云块的点云块类型;以及当点云块类型被设置为末尾点云块类型时,对点云块的点云块信息数据进行编码,点云块信息数据包括该点云块的末尾点云块类型。
43、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
44、第十方面涉及一种编码设备,包括:被配置成接收三维(3d)图像的接收器;耦合至接收器的存储器,该存储器包含指令;耦合至存储器的处理器,该处理器被配置成执行指令以使编码设备进行以下操作:获得多个点云块中的每一个的点云块帧数据单元(pfdu);向多个点云块中的每一个添加末尾点云块标志;基于末尾点云块标志的值,确定来自多个点云块的点云块的点云块类型是否为末尾点云块类型;以及当点云块类型不是末尾点云块类型时,对点云块的点云块信息数据进行编码,点云块信息数据包括点云块的点云块类型和末尾点云块标志。
45、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
46、在根据第九和第十方面本身的编码设备的第一实现形式中,编码设备还包括耦合至处理器的发送器,该发送器被配置成向解码器发送具有编码的点云块信息数据的比特流。
47、第十一方面涉及一种译码装备,包括:被配置成接收要编码的体积图片或接收要解码的比特流的接收器;耦合至接收器的发送器,该发送器被配置成将比特流发送至解码器或将已解码体积图像发送至被配置成重建已解码体积图片的重建设备;耦合至接收器或发送器中的至少一个的存储器,该存储器被配置成存储指令;以及耦合至存储器的处理器,该处理器被配置成执行存储器中存储的指令以执行本文中公开的方法中的任何方法。
48、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
49、在根据第十一方面本身的译码装备的第一实现形式中,译码装备还包括显示器,该显示器被配置成显示基于重建的点云块的图像。
50、第十二方面涉及一种系统,包括:编码器;以及与编码器进行通信的解码器,其中,编码器或解码器包括本文中描述的编码设备、解码设备或译码装备。
51、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
52、第十三方面涉及一种用于译码的装置,包括:接收装置,其被配置成接收要编码的体积图片或接收要解码、重建和投影的比特流;耦合至接收装置的发送装置,该发送装置被配置成将比特流发送至解码器或将已解码图像发送至显示装置;耦合至接收装置或发送装置中的至少一个的存储装置,该存储装置被配置成存储指令;以及耦合至存储装置的处理装置,该处理装置被配置成执行存储装置中存储的指令以执行本文中公开的方法中的任何方法。
53、使用这种译码方法允许对点云块帧数据单元中的点云块进行灵活排序。也就是说,具有不同点云块模式(例如,帧间、帧内、pcm等)的点云块可以以任何顺序被包括在点云块帧数据单元中。另外,可以向点云块帧数据单元添加额外的点云块。添加的补丁可以添加在点云块帧数据单元的末尾,或者添加在任何随机点云块索引位置。译码技术还允许使用跳过点云块数据单元类型(spdu)。当当前点云块数据单元和参考点云块数据单元的点云块数据单元元素相同或在可接受的容差内时,跳过点云块数据单元指示当前点云块的所有参数可以从参考点云块继承。译码技术还允许从信令中去除对匹配点云块的数量进行指示的语法元素,因为本文中描述的点云块类型信令足以表示点云块帧数据单元中的点云块的整个列表。此外,译码技术消除了用信号通知点云块帧数据单元中的点云块总数(例如,点云块帧数据单元的大小)的需要,并用特殊的终止点云块类型代替该过程。此外,译码技术允许脉冲编码调制(pcm)点云块被替换为pcm点云块类型指示,脉冲编码调制(pcm)点云块通常已经位于点云块帧数据单元的末尾。也允许多个pcm点云块。因此,相对于当前的编解码器,点云译码中的编码器/解码器(又名“编解码器”)得到改进(例如,v-pcc中的对点云块进行编码和解码的过程)。实际上,改进的点云译码过程可以增强译码效率,这在发送、接收和/或查看点云时为用户提供更好的用户体验。
54、为清楚起见,前述实施方式中的任一者可以与其他前述实施方式中的任一者或更多者结合以在本公开内容的范围内创建新的实施方式。
55、通过结合附图和权利要求进行的以下详细描述,将更清楚地理解这些和其他特征。
- 还没有人留言评论。精彩留言会获得点赞!