基于分布式冗余架构的安全保障方法、装置、设备及介质与流程
本公开涉及自动驾驶领域,尤其涉及一种基于分布式冗余架构的安全保障方法、装置、设备及介质。
背景技术:
1、港口/矿山/工厂等作业场景下用于平面运输的自动驾驶集装箱卡车/自动驾驶导引车等运输设备,在大多数情况下不在交通法律法规的管辖范围内,而是用作一个稳定可靠的工业产品使用。因此,在设计、研发这类运输设备上的自动驾驶系统时,不仅需要考虑符合《iso26262道路车辆功能安全》的要求保证系统的可靠性,同时需要考虑系统的可用性、稳定性来保证工业场景下的稳定作业。
2、目前,l3级别及以下的自动驾驶系统,最终的安全性通过驾驶员来保证,但在运行设计域范围内的l4级别自动驾驶车辆,安全性由自动驾驶系统自身来保证。另外,用于物流行业的运输设备,作为工业产品还需要考虑可用性及稳定性。
3、但是,现有的自动驾驶系统的传感器、系统架构、通信连接方式、处理器等硬件软件单一,若出现故障就无法正常使用,难以保证自动驾驶的安全性,也难以保证系统在生产环境中的可靠性、可用性、稳定性。
技术实现思路
1、为了解决上述技术问题,本公开提供了一种基于分布式冗余架构的安全保障方法、装置、设备及介质,以保证自动驾驶的安全性,保证系统在生产环境中的可靠性、可用性、稳定性。
2、第一方面,本公开实施例提供一种基于分布式冗余架构的安全保障方法,所述方法用于自动驾驶系统,自动驾驶系统包括传感器及底盘层、计算平台/硬件能力层、操作系统及中间件层、自动驾驶核心功能层,所述方法包括:
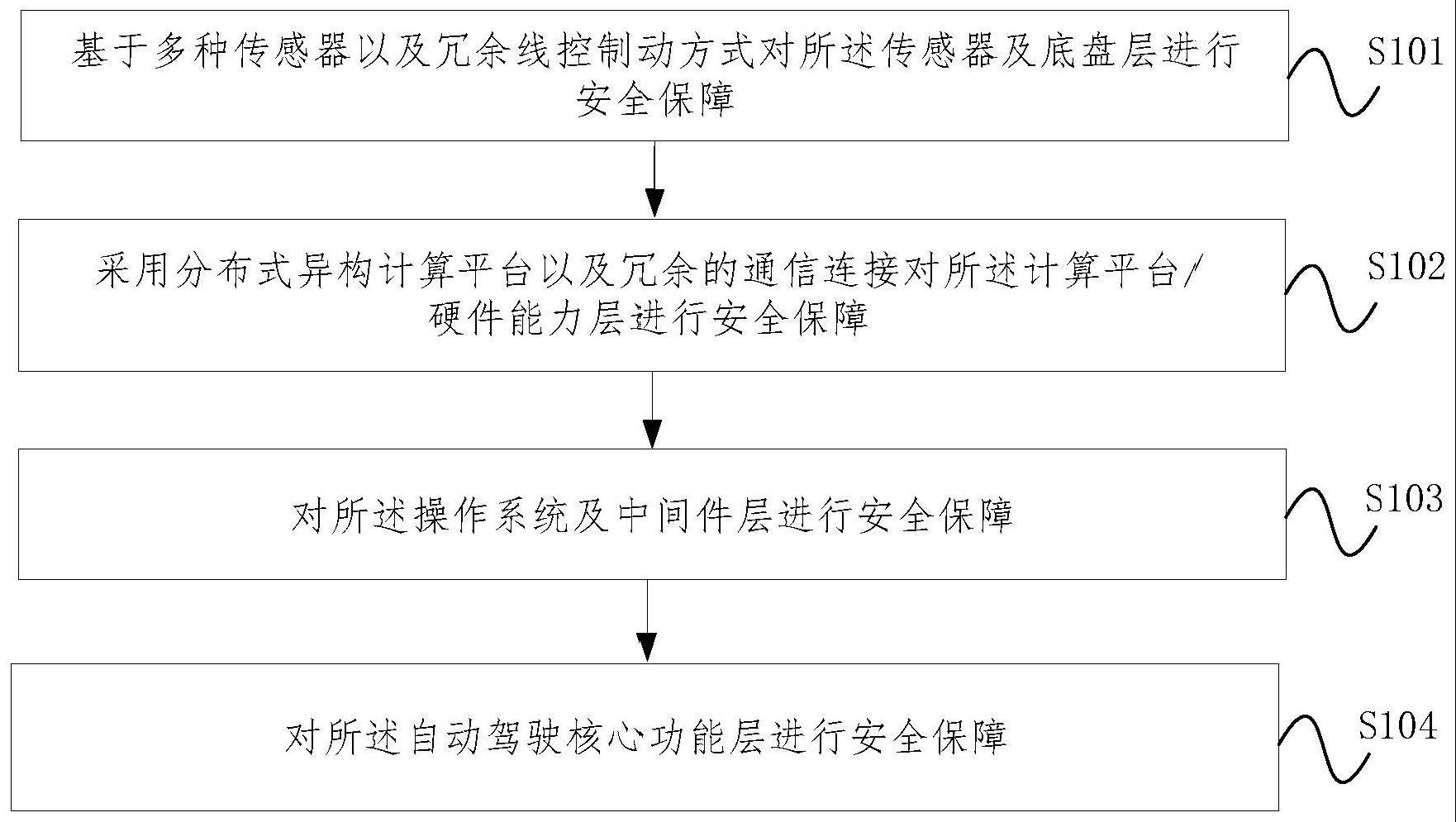
3、基于多种传感器以及冗余线控制动方式对所述传感器及底盘层进行安全保障;
4、采用分布式异构计算平台以及冗余的通信连接对所述计算平台/硬件能力层进行安全保障;
5、对所述操作系统及中间件层进行安全保障;
6、对所述自动驾驶核心功能层进行安全保障。
7、在一些实施例中,所述基于多种传感器以及冗余线控制动方式对所述传感器及底盘层进行安全保障,包括:
8、基于激光雷达或摄像头进行360度环境感知;
9、基于超声波进行预设区域的环境感知;
10、采用冗余线控制动方式进行制动安全保障。
11、在一些实施例中,所述采用分布式异构计算平台以及冗余的通信连接对所述计算平台/硬件能力层进行安全保障,包括:
12、采用分布式异构计算平台对所述计算平台/硬件能力层进行算力安全保障,并对所述分布式异构计算平台中的各个计算平台进行负载均衡;
13、基于冗余的网络通信连接、控制器局域网通信连接对所述计算平台/硬件能力层进行通信安全保障;
14、采用冗余的时间同步服务对分布式异构计算平台及传感器进行时间同步,所述时间同步服务包括基于以太网的时间同步服务、基于硬线连接的时间同步服务。
15、在一些实施例中,所述分布式异构计算平台至少包括两个中央处理器/图形处理器计算平台、一个微处理单元计算平台、一个现场可编程门阵列。
16、在一些实施例中,所述基于冗余的网络通信连接、控制器局域网通信连接对所述计算平台/硬件能力层进行通信安全保障,包括:
17、基于预置的车载以太网双网架构、冗余的网络设备、冗余的连接端口、冗余的连接线对所述计算平台/硬件能力层进行通信安全保障;
18、基于所述分布式异构计算平台中的各个计算平台与线控底盘之间独立的控制器局域网通信连接对所述计算平台/硬件能力层进行通信安全保障。
19、在一些实施例中,所述对所述操作系统及中间件层进行安全保障,包括:
20、基于实时操作系统对所述操作系统及中间件层进行安全保障;
21、基于数据分发服务的通信服务中间件对所述操作系统及中间件层进行安全保障。
22、在一些实施例中,所述对所述自动驾驶核心功能层进行安全保障,包括:
23、基于互相独立的融合定位硬件、激光定位硬件、视觉定位硬件对所述自动驾驶核心功能层进行定位安全保障;
24、基于互相隔离的激光感知硬件、视觉感知硬件、超声波感知硬件对所述自动驾驶核心功能层进行感知安全保障;
25、基于互相独立的规划控制硬件、安全守卫硬件对所述自动驾驶核心功能层进行控制安全保障。
26、第二方面,本公开实施例提供一种基于分布式冗余架构的安全保障装置,所述装置用于自动驾驶系统,自动驾驶系统包括传感器及底盘层、计算平台/硬件能力层、操作系统及中间件层、自动驾驶核心功能层,所述装置包括:
27、第一安全保障模块,用于基于多种传感器以及冗余线控制动方式对所述传感器及底盘层进行安全保障;
28、第二安全保障模块,用于采用分布式异构计算平台以及冗余的通信连接对所述计算平台/硬件能力层进行安全保障;
29、第三安全保障模块,用于对所述操作系统及中间件层进行安全保障;
30、第四安全保障模块,用于对所述自动驾驶核心功能层进行安全保障。
31、第三方面,本公开实施例提供一种电子设备,包括:
32、存储器;
33、处理器;以及
34、计算机程序;
35、其中,所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现如第一方面所述的方法。
36、第四方面,本公开实施例提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行以实现如第一方面所述的方法。
37、第五方面,本公开实施例还提供了一种计算机程序产品,该计算机程序产品包括计算机程序或指令,该计算机程序或指令被处理器执行时实现如第一方面所述的方法。
38、本公开实施例提供的基于分布式冗余架构的安全保障方法、装置、设备及介质,通过基于多种传感器以及冗余线控制动方式对所述传感器及底盘层进行安全保障,采用分布式异构计算平台以及冗余的通信连接对所述计算平台/硬件能力层进行安全保障,对所述操作系统及中间件层进行安全保障,对所述自动驾驶核心功能层进行安全保障。本公开解决了现有技术中难以保证自动驾驶的安全性,也难以保证在生产环境中的可靠性、可用性、稳定性的问题,本公开从传感器、系统架构、通信连接方式等层面都做了冗余处理,一个出现故障,另一个仍能正常工作,充分保证自动驾驶的安全性,也保证系统在生产环境中的可靠性、可用性、稳定性。
技术特征:
1.一种基于分布式冗余架构的安全保障方法,其特征在于,所述方法用于自动驾驶系统,自动驾驶系统包括传感器及底盘层、计算平台/硬件能力层、操作系统及中间件层、自动驾驶核心功能层,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于多种传感器以及冗余线控制动方式对所述传感器及底盘层进行安全保障,包括:
3.根据权利要求1所述的方法,其特征在于,所述采用分布式异构计算平台以及冗余的通信连接对所述计算平台/硬件能力层进行安全保障,包括:
4.根据权利要求3所述的方法,其特征在于,所述分布式异构计算平台至少包括两个中央处理器/图形处理器计算平台、一个微处理单元计算平台、一个现场可编程门阵列。
5.根据权利要求3所述的方法,其特征在于,所述基于冗余的网络通信连接、控制器局域网通信连接对所述计算平台/硬件能力层进行通信安全保障,包括:
6.根据权利要求1所述的方法,其特征在于,所述对所述操作系统及中间件层进行安全保障,包括:
7.根据权利要求1所述的方法,其特征在于,所述对所述自动驾驶核心功能层进行安全保障,包括:
8.一种基于分布式冗余架构的安全保障装置,其特征在于,所述装置用于自动驾驶系统,自动驾驶系统包括传感器及底盘层、计算平台/硬件能力层、操作系统及中间件层、自动驾驶核心功能层,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本公开涉及一种基于分布式冗余架构的安全保障方法、装置、设备及介质,通过基于多种传感器以及冗余线控制动方式对所述传感器及底盘层进行安全保障,采用分布式异构计算平台以及冗余的通信连接对所述计算平台/硬件能力层进行安全保障,对所述操作系统及中间件层进行安全保障,对所述自动驾驶核心功能层进行安全保障。本公开解决了现有技术中难以保证自动驾驶的安全性,也难以保证在生产环境中的可靠性、可用性、稳定性的问题,本公开从传感器、系统架构、通信连接方式等层面都做了冗余处理,一个出现故障,另一个仍能正常工作,充分保证自动驾驶的安全性,也保证系统在生产环境中的可靠性、可用性、稳定性。
技术研发人员:刘羿
受保护的技术使用者:北京斯年智驾科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!