激光建图方法及其装置、激光定位方法及其装置与流程
本技术涉及自动驾驶,尤其涉及一种激光建图方法及其装置、激光定位方法及其装置。
背景技术:
1、随着自动驾驶技术的成熟度越来越高,robotaxi(自动驾驶出租车)和robobus(自动驾驶巴士)的运营区域也越来越多样化,而由于城市中存在多种会影响传统组合导航定位效果的场景,例如城市峡谷、盘桥等,多传感器融合(multi-sensor fusion,简称msf)的技术也被更多的应用在自动驾驶车辆的定位方案中。
2、多传感器融合定位技术主要包括视觉建图与定位技术和激光建图与定位技术。相对于单目或者双目视觉定位技术,激光建图与定位技术有更好的工程化框架以及更高的精度和稳定性,因此在实际应用中被更多地作为首选方案,作为gnss(global navigationsatellite system,全球导航卫星系统)/rtk(real-time kinematic,实时动态差分)失效时的辅助观测,以保障运营区域全时、全气候的厘米级定位精度。
3、理想情况下,点云匹配定位的精度可以达到厘米级别(10cm以内),但是如果建图时的场景与定位时的场景变化大,例如,在建图时停车场附近的车辆多,而定位时车辆少,通过icp(iterative closest point,迭代最近点)或ndt(normal distributiontransform,正态分布变换)匹配算法无法计算出有效变换,定位精度会受到影响,误差会扩大到分米级,甚至无法输出正确的、置信度高的定位结果,进而影响自动驾驶车辆的正常行驶。
技术实现思路
1、本技术实施例提供了一种激光建图方法及其装置、激光定位方法及其装置,以提高激光建图精度和定位精度。
2、本技术实施例采用下述技术方案:
3、第一方面,本技术实施例提供一种激光建图方法,其中,所述激光建图方法包括:
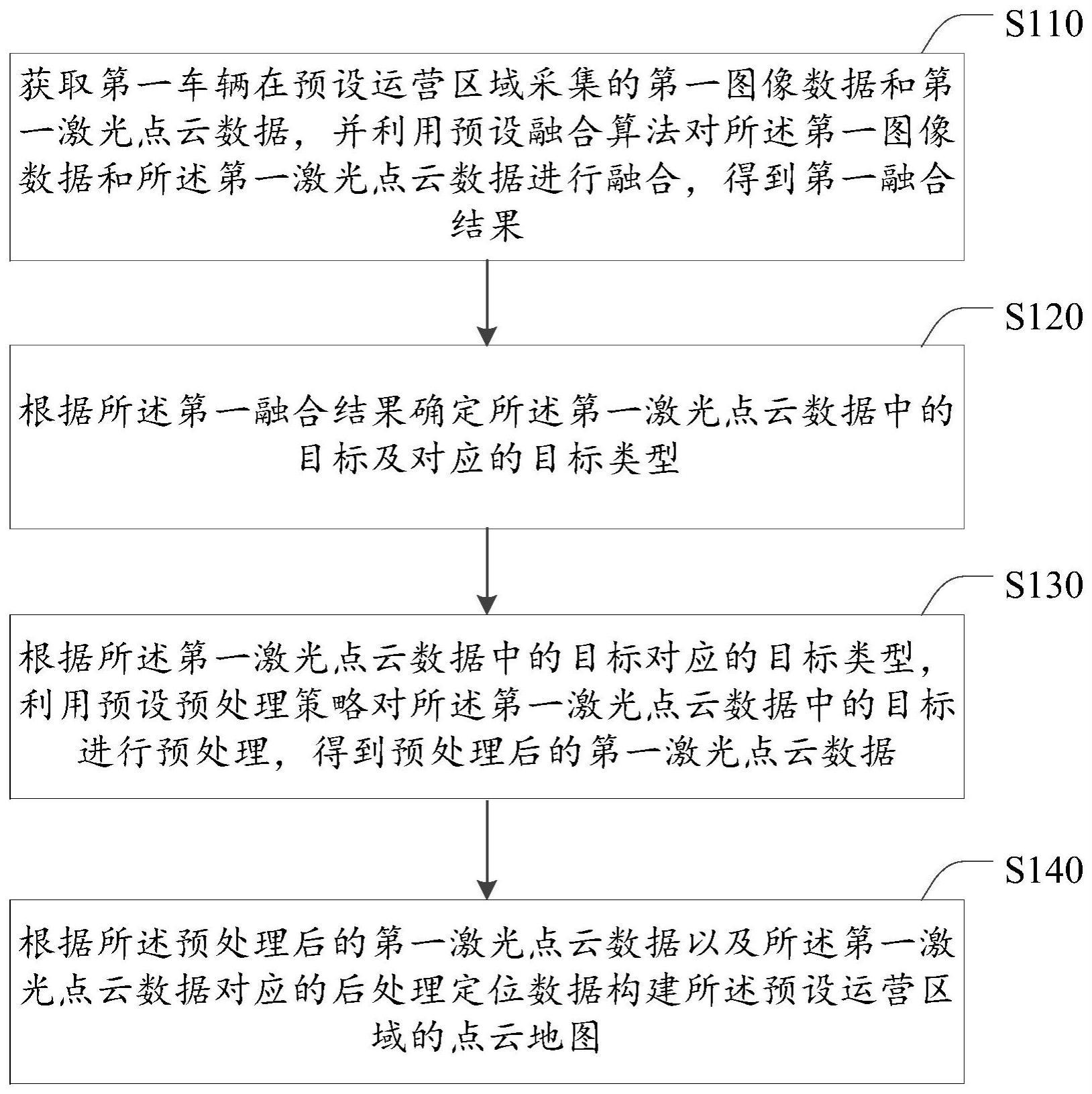
4、获取第一车辆在预设运营区域采集的第一图像数据和第一激光点云数据,并利用预设融合算法对所述第一图像数据和所述第一激光点云数据进行融合,得到第一融合结果;
5、根据所述第一融合结果确定所述第一激光点云数据中的目标及对应的目标类型;
6、根据所述第一激光点云数据中的目标对应的目标类型,利用预设预处理策略对所述第一激光点云数据中的目标进行预处理,得到预处理后的第一激光点云数据;
7、根据所述预处理后的第一激光点云数据以及所述第一激光点云数据对应的后处理定位数据构建所述预设运营区域的点云地图。
8、可选地,所述目标包括前景目标和背景目标,所述背景目标包括可变化背景目标和不可变化背景目标,所述根据所述第一激光点云数据中的目标对应的目标类型,利用预设预处理策略对所述第一激光点云数据中的目标进行预处理,得到预处理后的第一激光点云数据包括:
9、将所述前景目标从所述第一激光点云数据中剔除,并分别设置所述第一激光点云数据中的可变化背景目标和不可变化背景目标的点云权重,其中设置后的可变化背景目标的点云权重小于设置后的不可变化背景目标的点云权重,得到所述预处理后的第一激光点云数据。
10、可选地,在根据所述预处理后的第一激光点云数据以及所述第一激光点云数据对应的后处理定位数据构建所述预设运营区域的点云地图之后,所述方法还包括:
11、获取第二车辆在所述预设运营区域的激光定位结果以及获取所述预设运营区域的点云缺失位置集合;
12、根据所述第二车辆在所述预设运营区域的激光定位结果以及所述预设运营区域的点云缺失位置集合,确定是否对所述预设运营区域的点云地图进行更新。
13、可选地,所述获取所述预设运营区域的点云缺失位置集合包括:
14、确定所述第一车辆当前所处的场景区域,所述场景区域位于所述预设运营区域内;
15、根据所述第一激光点云数据中的目标及对应的目标类型,确定所述第一激光点云数据中的前景目标的相对数量;
16、根据所述第一车辆当前所处的场景区域和所述前景目标的相对数量构建所述预设运营区域的点云缺失位置集合。
17、可选地,所述根据所述第一车辆当前所处的场景区域和所述前景目标的相对数量构建所述预设运营区域的点云缺失位置集合包括:
18、基于高精地图数据获取所述第一车辆当前所处的场景区域的数据,所述场景区域的数据包括场景区域类型和场景区域位置;
19、根据所述前景目标的相对数量确定点云地图更新标识,所述点云地图更新标识包括可更新标识和不可更新标识;
20、根据所述第一车辆当前所处的场景区域的数据和所述点云地图更新标识构建所述预设运营区域的点云缺失位置集合。
21、可选地,所述根据所述前景目标的相对数量确定点云地图更新标识包括:
22、若所述前景目标的相对数量大于预设相对数量阈值,则确定所述点云地图更新标识为所述不可更新标识;
23、若所述前景目标的相对数量不大于预设相对数量阈值,则确定所述点云地图更新标识为所述可更新标识。
24、可选地,所述第二车辆在所述预设运营区域的激光定位结果包括激光定位位置和激光定位置信度,所述点云缺失位置集合包括点云地图更新标识,所述根据所述第二车辆在所述预设运营区域的激光定位结果以及所述预设运营区域的点云缺失位置集合,确定是否对所述预设运营区域的点云地图进行更新包括:
25、若所述激光定位置信度大于预设地图更新阈值,所述激光定位位置位于所述点云缺失位置集合内且对应的点云地图更新标识为可更新标识,则确定对所述预设运营区域的点云地图进行更新,并根据所述第二车辆在所述预设运营区域的激光定位结果对所述预设运营区域的点云地图进行更新;
26、否则,则确定不对所述预设运营区域的点云地图进行更新。
27、第二方面,本技术实施例还提供一种激光定位方法,其中,所述激光定位方法包括:
28、获取第三车辆在预设运营区域采集的第三图像数据和第三激光点云数据,并利用预设融合算法对所述第三图像数据和所述第三激光点云数据进行融合,得到第三融合结果;
29、根据所述第三融合结果确定所述第三激光点云数据中的目标及对应的目标类型;
30、根据所述第三激光点云数据中的目标对应的目标类型,利用预设预处理策略对所述第三激光点云数据中的目标进行预处理,得到预处理后的第二激光点云数据;
31、根据所述预处理后的第二激光点云数据和所述预设运营区域的点云地图确定所述第三车辆在所述预设运营区域的激光定位结果;
32、其中,所述预设运营区域的点云地图基于前述之任一所述激光建图方法得到。
33、可选地,在获取第三车辆在预设运营区域采集的第三图像数据和第三激光点云数据之后,所述方法还包括:
34、获取所述预设运营区域的点云缺失位置集合,所述点云缺失位置集合包括点云地图更新标识,所述点云地图更新标识包括不可更新标识;
35、根据所述预设运营区域的点云缺失位置集合以及所述第三激光点云数据对应的后处理定位数据,确定所述第三车辆是否进入不可更新标识对应的场景区域;
36、若是,则根据所述第三激光点云数据,利用激光slam算法确定所述第三车辆在所述预设运营区域的激光定位结果。
37、第三方面,本技术实施例还提供一种激光建图装置,其中,所述激光建图装置包括:
38、第一融合单元,用于获取第一车辆在预设运营区域采集的第一图像数据和第一激光点云数据,并利用预设融合算法对所述第一图像数据和所述第一激光点云数据进行融合,得到第一融合结果;
39、第一确定单元,用于根据所述第一融合结果确定所述第一激光点云数据中的目标及对应的目标类型;
40、第一预处理单元,用于根据所述第一激光点云数据中的目标对应的目标类型,利用预设预处理策略对所述第一激光点云数据中的目标进行预处理,得到预处理后的第一激光点云数据;
41、构建单元,用于根据所述预处理后的第一激光点云数据以及所述第一激光点云数据对应的后处理定位数据构建所述预设运营区域的点云地图。
42、第四方面,本技术实施例还提供一种激光定位装置,其中,所述激光定位装置包括:
43、第二融合单元,用于获取第三车辆在预设运营区域采集的第三图像数据和第三激光点云数据,并利用预设融合算法对所述第三图像数据和所述第三激光点云数据进行融合,得到第三融合结果;
44、第二确定单元,用于根据所述第三融合结果确定所述第三激光点云数据中的目标及对应的目标类型;
45、第二预处理单元,用于根据所述第三激光点云数据中的目标对应的目标类型,利用预设预处理策略对所述第三激光点云数据中的目标进行预处理,得到预处理后的第二激光点云数据;
46、第一定位单元,用于根据所述预处理后的第二激光点云数据和所述预设运营区域的点云地图确定所述第三车辆在所述预设运营区域的激光定位结果;
47、其中,所述预设运营区域的点云地图基于前述激光建图装置得到。
48、第五方面,本技术实施例还提供一种电子设备,包括:
49、处理器;以及
50、被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行前述之任一所述方法。
51、第六方面,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行前述之任一所述方法。
52、本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:本技术实施例的激光建图方法,先获取第一车辆在预设运营区域采集的第一图像数据和第一激光点云数据,并利用预设融合算法对第一图像数据和第一激光点云数据进行融合,得到第一融合结果;然后根据第一融合结果确定第一激光点云数据中的目标及对应的目标类型;之后根据第一激光点云数据中的目标对应的目标类型,利用预设预处理策略对第一激光点云数据中的目标进行预处理,得到预处理后的第一激光点云数据;最后根据预处理后的第一激光点云数据以及第一激光点云数据对应的后处理定位数据构建预设运营区域的点云地图。本技术实施例的激光建图方法将图像数据和激光点云数据融合进行目标识别,提高了仅依靠激光点云数据的目标识别精度,进一步根据融合结果确定目标类型,并针对不同的目标类型对激光点云数据采取不同的预处理操作,提高了点云地图的精度。
- 还没有人留言评论。精彩留言会获得点赞!