一种基于5G通信的室内定位方法
本发明涉及5g室内定位,具体地说是一种基于5g通信的室内定位方法。
背景技术:
1、随着移动互联网的快速发展,移动端的用户对通信定位服务的需求日益扩大,用户在高精度定位的需求在不断增加,尤其是在室内定位服务上。然而,受到非视距、空间信号干扰、各类障碍物等因素的影响,导致室内定位的技术要求要远远高于室外定位,系统架构也更加复杂。全球导航卫星系统(global navigation satellite system,gnss)虽然可以在室外实现精确定位,但是由于上述复杂的环境因素干扰,使得gnss在室内定位上的定位效果减弱,大部分室内区域也不在卫星信号的覆盖范围内。目前在室内定位技术上,已经有了很大突破,主流技术包括:uwb(超宽带)技术、rfid(射频识别)技术、ble(低功耗蓝牙)技术、wifi技术,上述技术都各有优点和缺点。近年来,随着5g通信技术在国内的大规模展开应用,利用5g信号的大宽带、低时延、高速率、多天线以及5g基站广覆盖的特点,基于5g通信的高精度室内定位技术成为研究的热点。
2、当前的室内定位方法主要分为基于几何的定位和基于位置指纹信息的定位,基于几何的定位方法主要是三角测量,主要包括:基于到达角度(aoa)、基于到达时间(toa)、基于到达时间差(tdoa),通过三角测量来估计目标位置,但是由于复杂的室内环境,基于几何的室内定位效果存在着不稳定性。基于位置指纹信息的定位是基于大量的样本学习,通过各种机器学习算法建立离线数据库,需要定位时进行在线匹配,实现高精度定位。因此,利用5g信号的大宽带、低时延、高速率、多天线的特性,将5g指纹信息与机器学习算法相结合,并利用计算机技术,使得基于5g的室内定位系统成为可能。
3、当前基于5g的指纹定位的系统大多是通过离线搜集位置信息,再通过滤波算法对采集到数据进行处理,然后对数据进行学习训练。这样的方法耗费大量人力、计算资源,自动化程度低,其中离线训练与在线定位这两者业务不能在一套系统内自动完成,不能满足当前移动互联网时代的发展需求。因此,采用分布式的服务架构,将移动端(5g手机)与服务端(数据处理服务器和ai计算服务器)业务相互独立,全部过程实现自动化,满足用户的定位需求,已势在必行。
4、现有技术的5g指纹定位系统不但自动化程度低,而且对算法计算资源要求较高,不能满足当前移动互联网时代的发展需求。
技术实现思路
1、本发明的目的是针对现有技术的不足而提供的一种基于5g通信的室内定位方法,采用移动端(5g手机)与服务端(数据处理服务器和ai计算服务器)业务相互独立的分布式服务架构,将ai计算服务与数据处理服务部署在不同的服务器上,利用5g信号的大带宽、低时延、高速率、多天线的特性,定位精度得到有效提升,可以有效减少单一系统上的机器学习算法进行训练计算时对系统硬件要求较高的问题,利用改进的高斯滤波算法对5g数据进行预处理,采用svm、random forest、knn算法对概率进行加权的室内定位方法,对复杂室内环境下引起的信号多径和单一算法引起的定位误差具有很好的提升效果,提高了定位系统商业化部署的可能性,方法简单,较好的解决了单一系统下数据处理与计算服务都在一台服务器上而引起的计算机资源紧张、定位响应实时性不够的问题,利用现有的5g设备,在不增加硬件投入的基础上,全部实现系统的自动化,在5g室内定位的商业应用中有较好的优势。
2、实现本发明目的的具体技术方案是:一种基于5g通信的室内定位方法,具体包括
3、步骤1:离线阶段对主要包括:搜集参考点坐标和相对应的5g信号(观测值矩阵)、对搜集到的观测值矩阵进行滤波、对训练集数据进行训练与学习、根据测试集数据生成的混淆矩阵(混淆矩阵是机器学习算法中的可视化工具,矩阵的每一列代表一个类的实例预测,而每一行表示一个实际的类的实例)计算约登指数(总结判断结果性能的一个参数),具体步骤如下:
4、步骤1.1:对待定位区域进行二维矩形网格划分得到参考点,将移动端设备放置于每个参考点进行观测,首先设置参考点的位置坐标(xi,yi),设置完成后,移动端设备将进入信号采集阶段,收集5g小基站信号,移动端设备收集到5g的a观测值矩阵v,并将5g的a观测值矩阵v发送给数据处理服务器。
5、步骤1.2:数据处理服务器对搜集到的a观测值矩阵v的数据预处理,剔除a观测值矩阵v中存在缺失值的行,采用改进的高斯滤波算法处理观测值,得到a平均观测值矩阵将滤波后的a平均观测值矩阵与对应格点的位置坐标(xi,yi),用户名(user)和定位时间(time_stamp)合并,构建离线定位指纹库f。
6、步骤1.3:将离线定位指纹库f提交给ai计算服务器,ai计算服务器调用分层抽样函数,按照7:3的比例将定位指纹库f划分为训练集ts1和测试集ts2,使用svm、randomforest算法分别对训练集ts1进行训练,分别得到分类模型m1、m2,使用knn算法对离线定位指纹库f生成数据集d1。
7、步骤1.4:步骤1.3训练结束后,ai计算服务器分别调用svm、random forest算法的分类模型m1、m2以及knn算法的数据集d1对步骤1.3中的测试集ts2数据进行测试,得到三个算法的混淆矩阵v′1(svm)、v′2(random forest)和v′3(knn)(混淆矩阵是机器学习算法中的可视化工具,矩阵的每一列代表一个类的实例预测,而每一行表示一个实际的类的实例)。
8、步骤1.5:根据混淆矩阵v′1,v′2,v′3,ai计算服务器分别计算出svm、randomforest、knn算法对应的约登指数(youden index)j1,j2,j3。
9、步骤2:在现阶段进行数据采集与移动端设备定位,具体步骤如下:
10、步骤2.1:将移动端设备放置于待定位区域中,采集5g基站到移动端设备的b观测值矩阵v*。
11、步骤2.2:对b观测值矩阵v*数据预处理,剔除b观测值矩阵v*中存在缺失值的行,采用改进的高斯滤波算法处理观测值,得到b平均观测值矩阵
12、步骤2.3:将b平均观测值矩阵分别输入到步骤1.4确定的svm、random forest算法的分类模型m1、m2和knn算法的数据集d1,ai计算服务器进行在线匹配,分别得到svm、random forest、knn三种算法的同一测试点位于某个参考点的概率pk1、pk2、pk3。
13、步骤2.4:根据步骤2.3得到的概率pk1、pk2和pk3,以及步骤1.5计算出的每种算法的约登指数j1、j2、j3,使用概率加权法得到测试点的概率分数总和s。
14、步骤2.5:重复步骤2.1-2.4,计算同一测试点对于其他参考点的概率分数总和,ai计算服务器会向数据服务器返回一组有序的概率分数总和sj(j=1,2......n)集合,数据服务器会根据从小到大的顺序进行排列比较,其中最大的概率分数总和smax所在的参考点即为定位坐标。
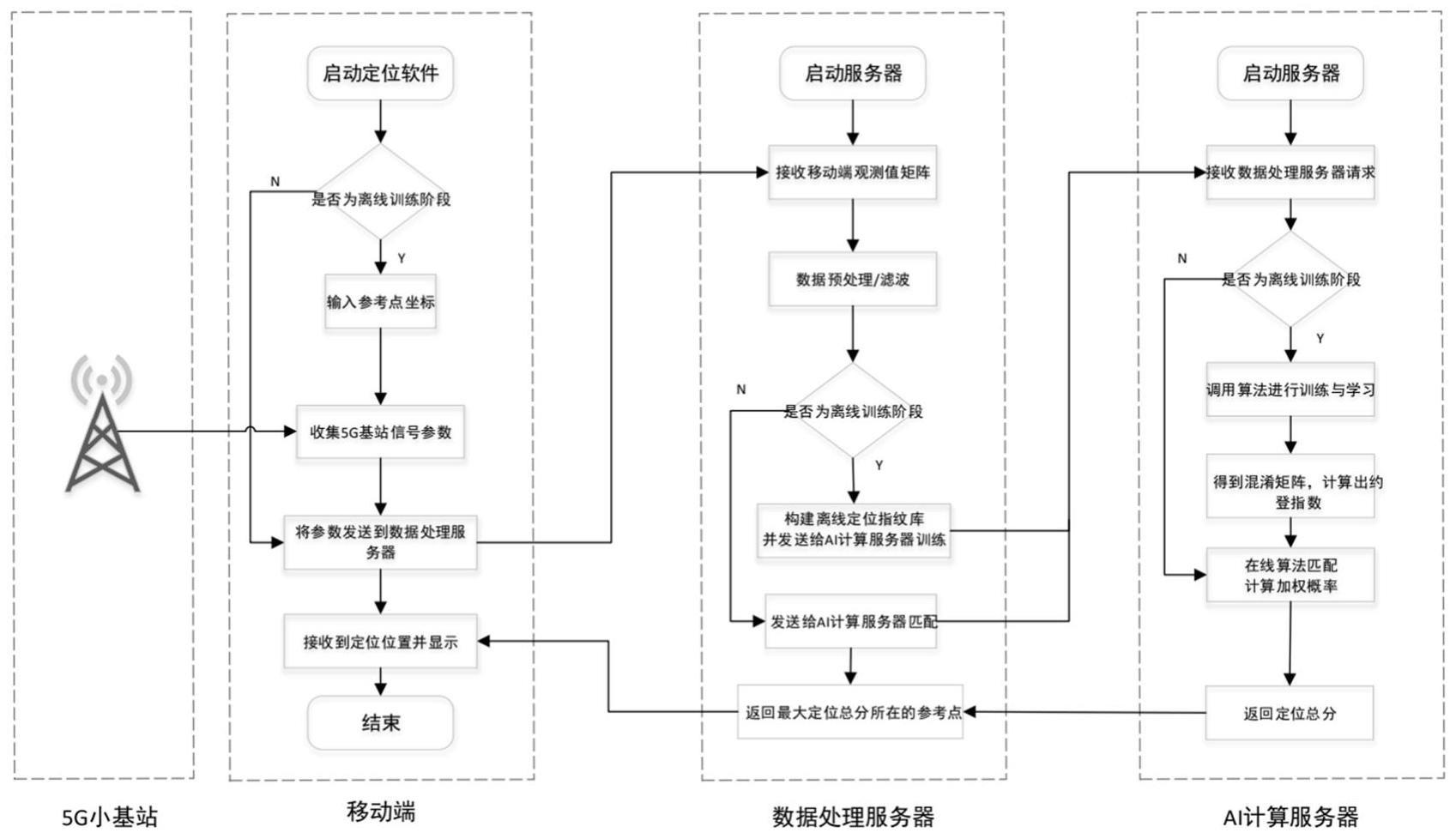
15、本发明应用于基于5g通信的室内定位系统,该系统具体包括:
16、1)5g小基站:用于发射定位所需要的5g信号;
17、2)移动端设备:支持5g通信的手机,离线训练阶段,用来采集5g信号参数和离线指纹实际位置坐标(xi,yi),将上述参数发送给数据处理服务器,在线阶段采集5g信号参数和获取定位坐标;
18、3)数据处理服务器:离线训练阶段,将移动端设备发送的5g信号参数和离线指纹库中的实际位置坐标(xi,yi),用户名(user)和定位时间(time_stamp)进行数据预处理形成离线定位指纹库f,在线定位阶段,将移动端设备发送的5g信号参数发送给ai计算服务器进行匹配,并将ai计算服务器返回的定位结果返回给移动端设备;
19、4)ai计算服务器:离线阶段将数据处理服务器处理完成的离线定位指纹库f分别输入到svm、random forest、knn算法中进行训练和学习运算,训练和学习结束后,通过svm、random forest模型和knn数据集对测试集数据进行匹配,得到混淆矩阵,ai计算服务器根据混淆矩阵计算出约登指数;在线阶段,ai计算服务器调用算法进行概率加权计算,将概率分数总和s返回给数据处理服务器,经数据处理服务器进行处理后将定位结果返回给移动端设备;
20、所述观测值矩阵v由5g信号的nr_ss_rsrp_ant0,nr_ss_rsrp_ant1,nr_wb_cqi,nr_pusch_txpower,nr_pucch_txpower,nr_ss_sinr,nr_ss_rssi,nr_ss_rsrq的八维观测值构成,记为v1,v2,v3,...,vn,n=8;所述nr_ss_rsrp_ant0为天线0的5g同步信号参考信号接收功率;所述nr_ss_rsrp_ant1为天线1的5g同步信号参考信号接收功率;所述nr_wb_cqi为信道质量指示;所述nr_pusch_txpower为pusch信道发送功率;所述nr_pucch_txpower为pucch信道发送功率;所述nr_ss_sinr为5g同步信号信噪比;所述nr_ss_rssi为5g接收信号强度指示;所述nr_ss_rsrq为5g参考信号接收质量。
21、所述改进的高斯滤波算法,具体算法的步骤如下:
22、1)对位置坐标(xi,yi)建立高斯模型,求得位置坐标(xi,yi)所有观测值矩阵的平均值,即:其中k为位置坐标(xi,yi)采集到的观测值矩阵个数;vi表示第i个观测值矩阵v,其中v中包含了(v1,v2,v3,...,vn,n=8)5g信号的八维观测值;
23、2)根据高斯密度函数选取高概率区的观测值矩阵v,即:其中μ为根据(1)式中位置坐标(xi,yi)计算得到的所有观测值矩阵平均值,σ是高斯分布的标准差,x为位置坐标(xi,yi)中一组观测值矩阵的值,将高概率区域选取在0.5≤f(x)≤0.8,根据正态分布概率表得出:μ≤v≤0.85σ+μ;
24、3)计算高概率区的v的几何均值将μ≤v≤0.85σ+μ范围内的v值全部取出,求取出值的几何平均值,即:其中中包含了经过高斯滤波后的(v1,v2,v3,...,vn,n=8)5g信号的八维观测值。
25、4)分别对经过高斯滤波后几何均值进行中值滤波与均值滤波,求得中值滤波与均值滤波的算术平均值即由下述(a)式表示为:
26、
27、其中,med为中值滤波算法,为某个参考点经过高斯滤波后的几何均值,n为参考点个数。
28、所述约登指数(youden index)i1、i2和i3的具体计算步骤如下:
29、1)由svm、random forest算法的分类模型m1、m2,以及knn算法的数据集d1对测试集ts2数据进行测试,得到测试点的混淆矩阵v′1(svm)=cm(c1,d),v′2(random forest)=cm(c2,d),v′3(knn)=cm(c3,d),即由下述(b)式表示为:
30、
31、其中,ci为分类器,c1为svm分类器,c2为random forest分类器,c3为knn分类器,n为参考点个数,d为分类用的测试集ts2,测试集ts2中包含t0个观测值,每个参考点分别含有ti个测试点数据(i=1,...,n),cmij为分类器c将测试点i分类成参考点j的数据占测试点i数据总数的百分比。
32、2)由混淆矩阵v′1(svm),v′2(random forest),v′3(knn)=cm(c3,d),获得每个分类器的fn、tp、fp和tn,其中fn表示假阴性,是指样本的实际类别为阳性,但模型预测为阴性的情况,tp表示真阳性,是指样本的实际类别为阳性,模型也将其预测为阳性的情况,fp表示假阳性,是指样本的实际类别为阴性,但模型预测为阳性的情况,tn表示真阴性,是指样本的实际类别为阴性,而模型也将其预测为阴性的情况;
33、3)根据每个分类器的fn(假阴性)、tp(真阳性)、fp(假阳性)和tn(真阴性),计算分类器svm、random forest、knn的约登指数(youden index):j1,j2,j3,即由下述(c)式计算:
34、j=sensitivity+specificity-1 (c)。
35、其中,灵敏度:特异度:
36、所述最大的概率分数总和smax,具体计算过程如下:
37、1)在待定区域,任意一点经过滤波的观测值矩阵经过svm、random forest算法的分类模型m1、m2和knn算法的数据集d1的在线匹配,分别得到svm、random forest、knn三种算法对于同一测试点位于某个参考点的概率pk1、pk2和pk3。
38、2)对概率pk1、pk2和pk3进行加权,分别得到svm、random forest、knn算法的加权概率q1、q2和q3,即:q=p×w,其中p为同一算法下的同一测试点位于某个参考点的概率pki,w为加权权重,w等于同一算法下的约登指数j。
39、3)对每个测试点经过加权后的三种算法加权概率进行求和,求得每个测试点位于某个参考点的概率分数总和s,即:s=q1+q2+q3。
40、4)重复上述步骤1-3,计算同一测试点对于其他参考点的概率分数总和,得到同一个测试点位于所有参考点的概率分数总和集合sj(j=1,2......n),其中n为参考点个数,依照从小到大到的顺序进行排列,选择最大的概率分数总和smax,其所在的参考点即为定位坐标。
41、本发明与现有技术相比具有定位精度提高,系统自动化程度大幅提升,系统采用分布式架构,将ai计算服务与数据处理服务部署在不同的服务器上,解决了单一系统下数据处理与计算服务都在一台服务器上而引起的计算机资源紧张、定位响应实时性不够的问题,本发明利用现有的5g设备,在不增加硬件投入的基础上,全部实现系统的自动化,在5g室内定位的商业应用中有较好的优势。
- 还没有人留言评论。精彩留言会获得点赞!