一种用于3D全景全息的角度调节装置及其使用方法与流程
本发明涉及3d全景全息的角度调节领域,特别是涉及一种用于3d全景全息的角度调节装置及其使用方法。
背景技术:
1、3d全息投影是一种利用干涉和衍射原理记录并再现物体真实的三维图像,是一种观众无需配戴眼镜便可以看到立体的虚拟人物的3d技术。
2、在公开号“cn109946918a”公开的“3d投影角度控制方法、装置和系统”,方法包括以下步骤:获取3d投影影像的时间/角度关系曲线;获取实时全息膜玻璃角度和实时播放时间;根据所述关系曲线、实时全息膜玻璃角度和实时播放时间,生成全息膜玻璃角度控制信号。
3、现有角度调节装置在进行角度调节的过程中,无法准确的识别需要角度调节的环境以及在投影需要调整较多方向的角度调整时准确性较低,而且需要多次导入固定投影面以及投影方向及大小的数据,修改麻烦。
技术实现思路
1、本发明的目的在于提供一种用于3d全景全息的角度调节装置及其使用方法,解决在进行角度调节的过程中,无法准确的识别需要角度调节的环境以及在投影需要调整较多方向的角度调整时准确性较低,而且需要多次导入固定投影面以及投影方向及大小的数据,修改麻烦的问题:
2、本发明为一种用于3d全景全息的角度调节装置,包括:
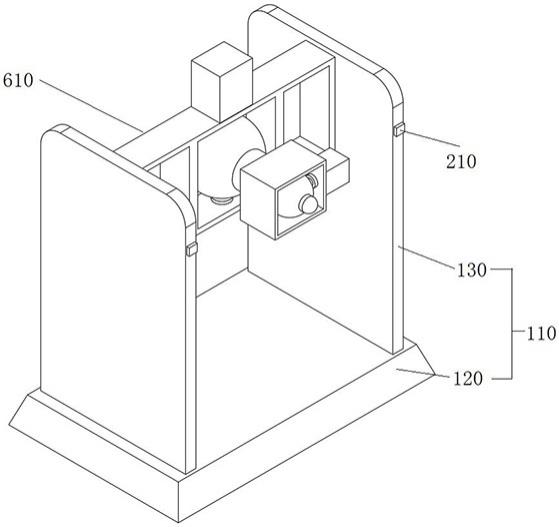
3、支架用于支持安装其他组件以及模块;
4、固定摄像模块以及可动摄像模块,所述固定摄像模块用于拍摄固定图像,所述可动摄像模块用于拍摄非固定图像;所述固定图像与非固定图像具有重叠图像;
5、角度调节组件,安装在支架上,用于调节3d全景全息投影仪的角度,所述可动摄像模块安装在3d全景全息投影仪上,且具有与3d全景全息投影仪同样的视野;
6、3d全景全息投影仪,安装在角度调节组件上,用于投射3d图像,3d图像的边角形成矩阵;
7、获取模块,与固定摄像模块以及可动摄像模块相连,用于获取3d全景全息投影仪需要旋转的角度;
8、角度设置模块,与获取模块相连,用于设置3d全景全息投影仪的旋转角度;
9、所述支架由一个横置的底座与两个与底座垂直连接的安装板组成,两个所述安装板沿底座中心轴对称设置,所述固定摄像模块设置在安装板上;
10、所述角度调节组件包括横向旋转部以及纵向旋转部,所述横向旋转部以及所述纵向旋转部控制的旋转方向相互垂直;
11、所述获取模块包括:
12、旋转部确定单元,用于从横向旋转部与纵向旋转部中确定需要旋转的部件;
13、旋转方向确定单元,与旋转部确定单元相连,用于确定3d全景全息投影仪的初始坐标值,并确定旋转方向。
14、其中,通过设置固定摄像模块以及可动摄像模块,通过固定摄像模块以及可动摄像模块,获取由所述固定摄像模块在3d全景全息投影仪工作前获取的固定投影面的第一图像数据,以及获取由所述固定摄像模块在3d全景全息投影仪工作后获取的所述固定投影面的第二图像数据,且固定投影面位于重叠视野内,获取3d全景全息投影仪需要旋转的角度,确定需要旋转的部件,然后确定3d全景全息投影仪的初始坐标值,并确定旋转方向,确定3d全景全息投影仪所需要到达的位置,根据3d全景全息投影仪所需要到达的位置计算出所需要旋转的角度,最后输出所需要旋转的角度,能够方便地将3d全景全息投影仪进行任意角度的旋转控制,且由于固定摄像模块固定在安装板上,而可动摄像模块设置在3d全景全息投影仪上,所以能够实时的导入位置数据,修改较为简单。
15、而且,通过设置固定摄像模块以及可动摄像模块,获取由所述固定摄像模块在3d全景全息投影仪工作前获取的固定投影面的第一图像数据,以及获取由所述固定摄像模块在3d全景全息投影仪工作后获取的所述固定投影面的第二图像数据,其中,固定投影面位于重叠视野内,根据所述第二图像数据确定由所述固定摄像模块获取的在所述重叠视野下的第一投影亮度值,以及根据所述第一图像数据和所述第二图像数据确定在所述重叠视野下的第一投影光比例值根据所述第二投影亮度值和所述第一投影光比例值,由于可动摄像模块安装在3d全景全息投影仪上,且具有与3d全景全息投影仪同样的视野,确定所述3d全景全息投影仪在所述重叠视野下需要旋转的旋转阈值,旋转阈值始终根据固定摄像模块以及可动摄像模块的图像数据确定,而可动摄像模块又随时跟着3d全景全息投影仪,所以第二图像数据是实时变化的,使旋转阈值的确定始终准确,解决了在进行角度调节的过程中,无法准确的识别需要角度调节的环境以及在投影需要调整较多方向的角度调整时准确性较低的问题,提高了需要角度调整时的准确性。
16、通过控制横向旋转部与纵向旋转部,能够通过将需要旋转的角度拆解为横向旋转以及纵向旋转,提高了在多方向角度调整时的准确性;
17、通过角度设置模块控制角度调节组件进行自动化调整,提高了角度调整的效率,减少了角度调整的准备时间。
18、优选地,所述横向旋转部包括安装架、第一转向球、第一驱动轴、涡卷弹簧、第一驱动件以及限位件,所述安装架设置在两个安装板之间,所述第一转向球通过第一转轴活动设置在安装架上,所述第一驱动轴连接第一转轴,且其上设置有涡卷弹簧,所述第一驱动件输出端连接第一驱动轴,所述第一驱动轴上设置有限位件;
19、其中,第一转向球为球状,在进行旋转时能够更加的顺畅,第一驱动件能够进行正反转,驱动第一转向球进行两个相反方向的旋转,且第一驱动件设置在第一转向球的顶部,驱动其进行横向旋转,涡卷弹簧配合限位件能够限制第一转向球的旋转角度,防止其旋转角度过大,保护3d全景全息投影仪的安全。
20、优选地,所述纵向旋转部包括连接件、外壳、第二转向球、第二驱动轴以及第二驱动件,所述外壳通过连接件连接在第一转向球上,所述第二转向球通过第二转轴活动安装在外壳内,所述第二驱动轴连接第二转轴,所述第二驱动件输出端连接第二转轴;
21、其中,与横向旋转部工作原理相同,第二驱动件能够驱动第二转向球进行纵向的旋转活动。
22、优选地,所述角度设置模块包括:
23、位置确定单元,用于确定3d全景全息投影仪所需要到达的位置;
24、计算单元,用于根据3d全景全息投影仪所需要到达的位置计算出所需要旋转的角度;
25、角度确定单元,用于输出所需要旋转的角度。
26、一种用于3d全景全息的角度调节装置的使用方法,包括以下步骤:
27、s1、
28、通过固定摄像模块以及可动摄像模块,获取由所述固定摄像模块在3d全景全息投影仪工作前获取的固定投影面的第一图像数据,以及获取由所述固定摄像模块在3d全景全息投影仪工作后获取的所述固定投影面的第二图像数据,其中,固定投影面位于重叠视野内;
29、s2、
30、根据所述第二图像数据确定由所述固定摄像模块获取的在所述重叠视野下的第一投影亮度值,以及根据所述第一图像数据和所述第二图像数据确定在所述重叠视野下的第一投影光比例值;
31、s3、
32、通过预先标定的在3d全景全息投影仪工作下所述固定摄像模块和所述可动摄像模块对投影光的敏感度的转换关系,将所述第一投影亮度值转换为与所述可动摄像模块对应的第二投影亮度值;
33、s4、
34、根据所述第二投影亮度值和所述第一投影光比例值,由于可动摄像模块安装在3d全景全息投影仪上,且具有与3d全景全息投影仪同样的视野,确定所述3d全景全息投影仪在所述重叠视野下需要旋转的旋转阈值;
35、s5、
36、获取3d全景全息投影仪需要旋转的角度,确定需要旋转的部件,然后确定3d全景全息投影仪的初始坐标值,并确定旋转方向;
37、s6、
38、确定3d全景全息投影仪所需要到达的位置,根据3d全景全息投影仪所需要到达的位置计算出所需要旋转的角度,最后输出所需要旋转的角度;
39、s7、
40、角度调节组件进行工作,带动3d全景全息投影仪移动到指定位置。
41、优选地,计算旋转角度采用三角函数算法计算所述3d全景全息投影仪旋转角度。
42、优选地,获取由所述固定摄像模块在3d全景全息投影仪工作前获取的固定投影面的第一图像数据,以及获取由所述固定摄像模块在3d全景全息投影仪工作后获取的所述固定投影面的第二图像数据包括:
43、判断所述重叠视野与所述固定视野是否重合;
44、在所述重叠视野与所述固定视野不重合的情况下,获取由所述固定摄像模块在3d全景全息投影仪工作前获取的固定投影面的第一图像数据,以及获取由所述固定摄像模块在3d全景全息投影仪工作后获取的所述固定投影面的第二图像数据。
45、优选地,根据所述第一图像数据和所述第二图像数据确定在所述重叠视野下的第一投影光比例值包括:
46、根据所述第一图像数据,确定在投影光照射下所述固定投影面在色度空间内的第一色度空间图像数据;
47、根据所述第二图像数据,确定在投影光照射下所述固定投影面在色度空间内的第二色度空间图像数据;
48、根据所述第一色度空间图像数据和所述第二色度空间图像数据,确定在所述重叠视野下的所述第一投影光比例值。
49、本发明具有以下有益效果:
50、1、本发明通过设置固定摄像模块以及可动摄像模块,通过固定摄像模块以及可动摄像模块,获取由所述固定摄像模块在3d全景全息投影仪工作前获取的固定投影面的第一图像数据,以及获取由所述固定摄像模块在3d全景全息投影仪工作后获取的所述固定投影面的第二图像数据,且固定投影面位于重叠视野内,获取3d全景全息投影仪需要旋转的角度,确定需要旋转的部件,然后确定3d全景全息投影仪的初始坐标值,并确定旋转方向,确定3d全景全息投影仪所需要到达的位置,根据3d全景全息投影仪所需要到达的位置计算出所需要旋转的角度,最后输出所需要旋转的角度,能够方便地将3d全景全息投影仪进行任意角度的旋转控制,且由于固定摄像模块固定在安装板上,而可动摄像模块设置在3d全景全息投影仪上,所以能够实时的导入位置数据,修改较为简单。
51、2、本发明通过设置固定摄像模块以及可动摄像模块,获取由所述固定摄像模块在3d全景全息投影仪工作前获取的固定投影面的第一图像数据,以及获取由所述固定摄像模块在3d全景全息投影仪工作后获取的所述固定投影面的第二图像数据,其中,固定投影面位于重叠视野内,根据所述第二图像数据确定由所述固定摄像模块获取的在所述重叠视野下的第一投影亮度值,以及根据所述第一图像数据和所述第二图像数据确定在所述重叠视野下的第一投影光比例值根据所述第二投影亮度值和所述第一投影光比例值,由于可动摄像模块安装在3d全景全息投影仪上,且具有与3d全景全息投影仪同样的视野,确定所述3d全景全息投影仪在所述重叠视野下需要旋转的旋转阈值,旋转阈值始终根据固定摄像模块以及可动摄像模块的图像数据确定,而可动摄像模块又随时跟着3d全景全息投影仪,所以第二图像数据是实时变化的,使旋转阈值的确定始终准确,解决了在进行角度调节的过程中,无法准确的识别需要角度调节的环境以及在投影需要调整较多方向的角度调整时准确性较低的问题,提高了需要角度调整时的准确性。
52、3、本发明通过控制横向旋转部与纵向旋转部,能够通过将需要旋转的角度拆解为横向旋转以及纵向旋转,提高了在多方向角度调整时的准确性。
53、4、本发明通过角度设置模块控制角度调节组件进行自动化调整,提高了角度调整的效率,减少了角度调整的准备时间。
54、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!