基于深度学习的极弱光环境下探测器运动散射成像装置及方法
本发明涉及成像领域,尤其涉及一种基于深度学习的极弱光环境下探测器运动散射成像装置及方法。
背景技术:
1、少光子情况下的散射成像恢复在现实生活中具有重要的应用,在夜间探测,生物医学成像,卫星观测领域都有重要应用。
2、传统成像设备获取一张高质量图片一般需要1012光子数,平均到每像素来说,一个高质量的阵列探测器平均每像素需捕获105光子数。但在实际应用中,光子计数值很难达到这个要求。尤其在极弱光和曝光时间有限的情形下,有效光子数甚至只能达到几个。
3、在光子数充足的情况下普通的探测器探测的信号是模拟量,其光信号中包含着大量的光子,这些光子叠加在一起即为探测所得的光强。通过记录探测目标上每个位置的光强来获取图像的方式称作模拟方式。但是随着探测目标的光强衰减,光强逐渐变为脉冲信号,尤其当光强衰弱到单光子条件时,信号变为脉冲数很少的离散脉冲信号。而单光子一般被看作是探测的极限,是不能进一步分割的最小的能量单位。因此,在少光子计数条件下,信号呈现的是粒子特征。在这种情况下,把光当作单个光子来记录,在探测单个光子的同时确定它的空间位置,进行二维光子计数探测,这便是光子计数成像的基础。
4、单光子相机(spc)是一种二维阵列探测器,它的每个像素有一个单光子雪崩二极管(spad),相当于一个独立的点探测器,极弱光环境下光子击穿单光子雪崩二极管进行计数,特别的,这种相机所成的图像并不是灰度图,它的每个像素代表的是单位时间内落在该像素上的光子数,而极弱光环境下的主要噪声来源是光的粒子性带来的泊松噪声,通过对光子数进行归一化即可获得所需灰度图。另外可以通过首达光子技术利用其光子序列的飞行时间对目标进行成像,进一步改善单光子探测器的分辨率。因为其灵敏度可以突破散粒噪声的极限,且具有良好的信噪比,功耗低,量子效率高,体积小等优点,被广泛应用于极弱光成像领域。
5、传统物理研究问题与深度学习结合已经发挥出了一些优势,尤其在图像处理方面。传统散射成像只关注散射单个问题,没有关注少光子计数和散射以及运动目标三种限制同时存在的复杂情况。在少光子环境下、探测到的散斑包含大量散粒噪声,信噪比降低,基于光的波动性的散射成像的方法难以对少光子探测下的散斑进行恢复。而目标运动时传输路径发生改变,所携带的散射波前信息亦有所不同。基于散射介质的学习以及基于传输过程的建模的成像方法也无法解决上述复杂情况下的困境。强光情况下的方法需要对目标进行扫描多次探测,运动过程及光路中的散射过程也使得少光子下探测器与目标相对运动下散射的成像变得更为复杂。近年来,深度学习的方法被广泛应用在极弱光成像领域,并取得了不错的成像结果。但现有技术中的深度学习的方法也有着许多的缺陷,比如需要采样大量的训练数据进行预训练,神经网络才能学到散射模式的特征,进而具有成像的能力。然而目标运动的情况下,所用到的散射介质区域较大,不同位置之间的相关性较弱,无法学习到有效信息。因此在目标运动位置相对变化较大的时候,现有技术中的深度学习方法训练时需要处理大量数据且效果亦无法保障神经网络的学习能力。因此,本领域的技术人员致力于开发一种基于深度学习的极弱光环境下运动探测成像装置及方法以解决现有技术中存在的问题。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是传统散射成像只关注散射单个问题,没有关注少光子计数和散射以及探测器运动三种限制同时存在的复杂情况的技术问题,从而提出一种在极弱光环境下并且目标运动下探测成像的装置和方法来解决上述问题。
2、为实现上述目的,本发明提供了一种基于深度学习的极弱光环境下探测器运动散射成像装置,其特征在于,该装置包括:
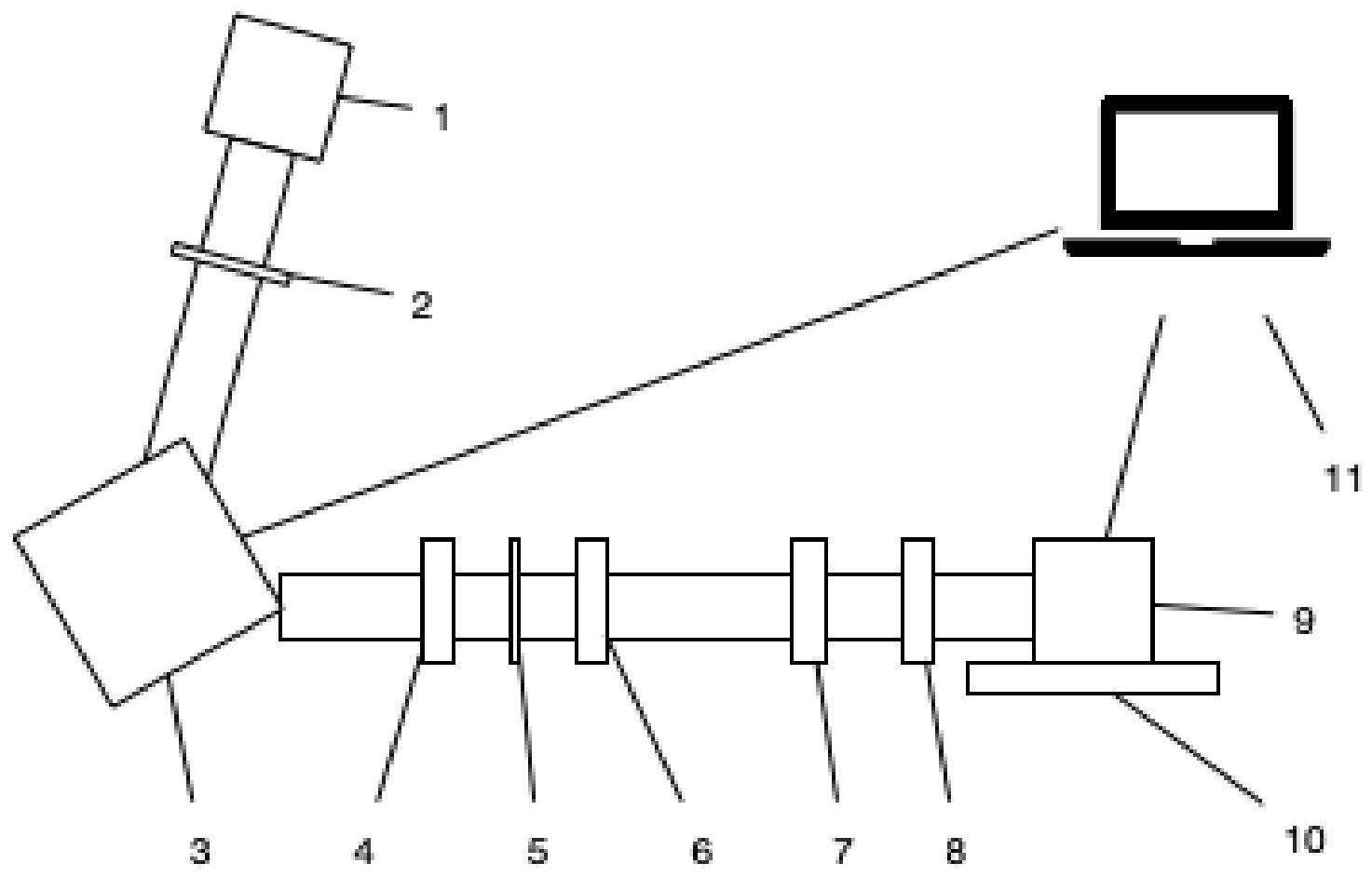
3、光源,用于生成极弱光光源;
4、聚焦组件,用于对所述极弱光光源执行光路聚焦;
5、至少一级散射光路,用于对聚焦后的极弱光执行散射处理;
6、探测器,设置于一调节装置上,所述调节装置被配置为在设定测量范围下的运动模式,带动所述探测器在多个位置状态下采集经过所述散射光路处理后的极弱光;所述调节装置生成多个位置状态下的位置信息;
7、处理器,用于接收所述探测器的光信号并执行分析,在所述多个位置对应生成用于深度学习的神经网络数据样本,所述数据样本包括图像信息及与所述图像信息对应的所述位置信息。
8、进一步地,所述探测器与所述光源以相同的频率进行光场强度值采集。
9、进一步地,所述调节装置与所述探测器的信息采集时间同步。
10、进一步地,所述至少一级散射光路包括沿光路依次设置的第一毛玻璃及第二毛玻璃。
11、进一步地,所述探测器为单光子相机。
12、本发明还公开了一种基于深度学习的极弱光环境下探测器运动散射成像方法,其特征在于,该方法包括:
13、步骤1、搭建带有散射介质的光路,调整光照强度和曝光时间,获取极弱光下的探测成像;
14、步骤2、在探测范围内的n个固定位置获得目标散射图,获取散射成像图及对应的固定位置信息;
15、步骤3、使用每个固定位置的所述散射成像图及所述固定位置信息分别训练神经网络,训练完成后形成具有所述固定位置标记的神经网络;
16、步骤4、应用上述神经网络训练获取其它位置下的散射成像图。
17、进一步地,
18、所述步骤3中的神经网络被优化,所述优化为将弱光散射图像作为神经网络的输入,输出为模型重建的清晰图像,通过最小化模型重建的清晰图像与原始清晰图像之间的均方误差来自动调整参数,从而获取神经网络模型。
19、进一步地,
20、所述步骤4具体为:
21、步骤4-1、在探测范围内移动探测器,获得测试用的运动探测的采样图以及探测器所在导轨的位移信息;
22、步骤4-2、将步骤4-1中的待恢复低光子散斑与导轨位置对就近划归到所述步骤2所述固定位置所在区域;
23、步骤4-3、采用所述神经网络,对步骤4-2中获取的预分类待恢复低光子运动目标散斑进行重建。
24、进一步地,所述步骤4-3具体为:
25、步骤4-3-1、将步骤4-1获取的采样图和步骤4-2获取的位置分类信息通过步骤3对应的神经网络,获取重建目标;
26、步骤4-3-2、将步骤4-1获取的采样图通过步骤3获得的单一位置神经网络,获取重建目标;
27、步骤4-3-3、对比分析由探测器位于单一位置训练的神经网络及探测器多个位置先分类后恢复的神经网络的结果,输出结果。
28、进一步地,所述步骤1中的曝光时间为2μs。
29、技术效果
30、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
31、本发明首先提出了在极弱光即低光子数的成像状态下,并且探测器为运动情况下的散射成像装置和方法,提出了采用对探测器位置进行预分区减少了每次训练所需的训练样本数量,使得后续训练次数限定在有限批次内,也减少训练次数。使用不同位置的数据集分类进行训练,能有效提升对环境信息的学习,提高同区域网络训练速度和整体训练效果。
32、使用低光子散斑采样图作为训练数据,训练并保存n个指定位置的从极弱光即低光子散斑采样图对应原始目标图像的神经网络。神经网络为含额外跳跃连接的u型网络。神经网络的下采样与上采样的对应层次进行跳跃连接,卷积过程的每层网络之间也使用跳跃连接来增加层级之间的相关性。减小了单个神经网络训练样本时所需的样本量。避免了当探测器运动时需要重新对所在位置的散斑进行重新采样进行深度学习的过程,鲁棒性更强。整体上使用了更多训练样本,提高了深度学习方法对极弱光环境下的散射成像恢复和追踪的质量。
- 还没有人留言评论。精彩留言会获得点赞!