一种基于全景摄像的变电远程运维系统及其设备的制作方法
本发明涉及变电站维护,具体为一种基于全景摄像的变电远程运维系统及其设备。
背景技术:
1、变电站电力设备的巡检运维方式已由传统的人机互助系统逐渐转变为智能全自动机械化巡检运维系统,并且配备远程运维系统,随着科技的不断发展,变电远程运维系统及其设备的发展方向越来越趋向于多样化的方向。
2、根据中国专利cn115314679a中提出:一种基于全景摄像的变电远程运维系统,包括全景采集设备、推流服务器、现场终端和多个远程终端,所述全景采集设备、现场终端和多个远程终端均与所述推流服务器通信连接;所述全景采集设备安装在变电站运维现场,能够采集变电站运维现场的图像与声音,生成变电站运维现场的全景视频;现场运维人员能够在现场终端中建立远程运维任务,选取对应的远程运维支持人员;所述推流服务器能够将所述全景视频推送至所述远程运维支持人员对应的远程终端,并建立现场终端和远程终端之间的实时通讯。
3、在实现上述操作过程中,该发明人至少还发现如下技术问题:现有的基于全景摄像的变电远程运维系统无法自动化达到预报警操作,进而导致无法及时发现设备故障,排除设备故障,从而导致基于全景摄像的变电远程运维系统效率低下,实用效果不佳的问题,同时现有基于全景摄像的变电远程运维系统的摄像设备一般都采用固定式巡检的方式,进而导致其巡检的画面不够精确,从而导致巡检不佳的问题。
技术实现思路
1、本发明的目的在于提供一种基于全景摄像的变电远程运维系统及其设备,以解决背景技术中提出的问题。
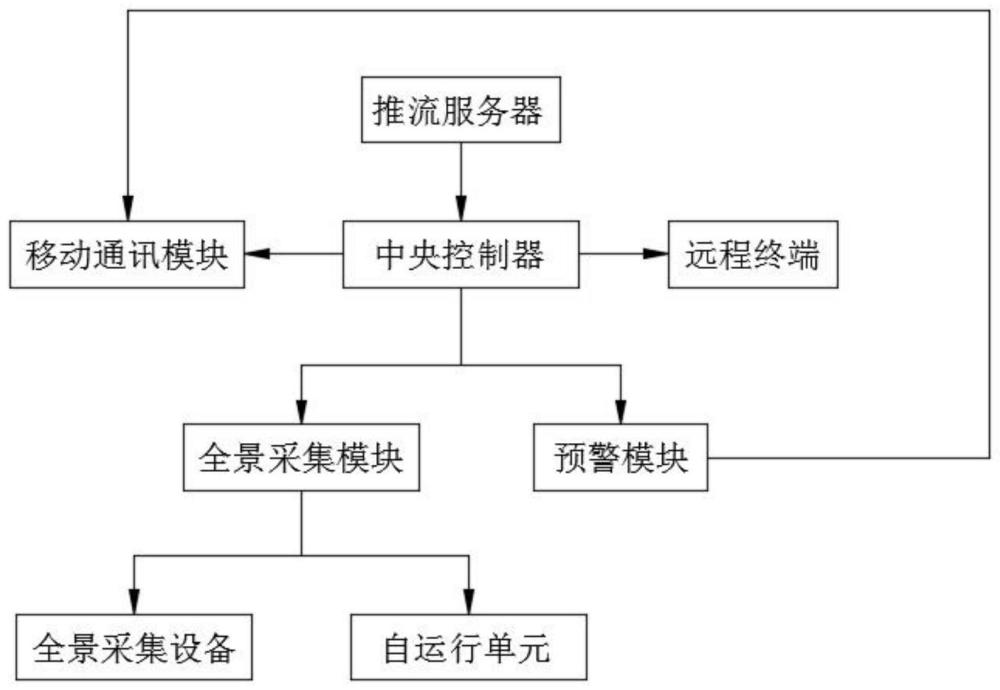
2、为实现上述目的,本发明提供如下技术方案:一种基于全景摄像的变电远程运维系统,包括推流服务器、中央控制器、远程终端、全景采集模块、预警模块和移动通讯模块,
3、所述推流服务器用于响应远程终端的服务请求,进行数字化处理,同时用于数据存储;
4、所述中央控制器用于对各个模块进行控制,协调各个模块进行工作;
5、所述远程终端用于远程运维人员登录,查看变电站运维现场全景画面,同时接收远程运维任务;
6、所述全景采集模块用于对变电站运维现场进行实时监测;
7、所述预警模块用于对变电站运维现场,一些明显设备故障以及安全事故进行预报警操作;
8、所述移动通讯模块用于接收与发送视频信号与语音信号,用于远程终端使用人员之间的相互通讯,所述预警模块与移动通讯模块通讯连接。
9、进一步的,所述全景采集模块包括全景采集设备和自运行单元,所述所述全景采集设备对变电站运维现场进行实时拾取视频信号与语音信号,所述自运行单元控制全景采集设备进行全方位运动。
10、进一步的,所述预警模块包括初检单元、发送单元、物联网网关和控制箱体;
11、所述中央控制器将全景采集模块中的全景采集设备所采集到变电站运维现场的全景画面与语音信号传输到预警模块中的初检单元,所述初检单元将全景画面与语音信号通过物联网网关传输到控制箱体,所述控制箱体通过全景画面与语音信号将故障数据通过匹配模块与云端故障数据相对比匹配,所述匹配模块将匹配到相一致的故障数据发送到诊断单元,所述诊断单元根据相一致的故障数据得出故障诊断结果通过发送单发送到移动通讯模块,所述移动通讯模块将故障诊断结果发送到远程终端,同时建立远程运维任务。
12、一种基于全景摄像的变电远程运维摄像设备,包括轨道架,所述轨道架上设置有全景摄像装置,所述全景摄像装置设置有四个,且与轨道架的四侧相对应,所述全景摄像装置外侧壁固定安装有控制装置,所述全景摄像装置的上侧固定连接有第一缓冲装置,所述第一缓冲装置的上侧固定连接有第二缓冲装置,所述第二缓冲装置上设置有减震装置;
13、所述全景摄像装置包括安装座、第一电机、滚动轮、电动伸缩杆、连接杆和转向机构,所述轨道架的外侧设置有安装座,所述安装座靠近轨道架中心的一侧固定连接有第一电机,所述第一电机靠近轨道架外部的一侧传动连接有滚动轮,所述滚动轮贯穿安装座,所述滚动轮在轨道架上滚动,且轨道架上开设有与滚动轮相对应的滑槽,所述安装座靠近轨道架中心一端的下侧固定连接有电动伸缩杆,所述电动伸缩杆的轴向外侧固定连接有连接杆,所述连接杆另一端的内侧固定安装有转向机构。
14、进一步的,所述转向机构的结构包括球形座、球状轴、第二电机、转动轴和摄像机,所述连接杆远离电动伸缩杆一端的内侧固定连接有球形座,所述球形座的内侧转动连接有球状轴,所述球状轴的上侧固定连接有第二电机,所述第二电机的上侧传动连接有转动轴,所述转动轴的上侧设置有摄像机。
15、进一步的,所述控制装置包括连接块、第三电机和转动轮,所述球形座的轴向外侧固定连接有连接块,所述连接块的一侧固定连接有第三电机,所述第三电机远离连接块的一侧传动连接有转动轮,所述球形座上开设有与转动轮相对应的开槽。
16、将轨道架插入到地面以下,在外浇筑混凝土固定,使得轨道架包围着变电站,变电站分布在轨道架的内侧,随后远程运维系统控制启动第一电机,第一电机带动滚动轮进行转动,进而带动摄像机沿轨道架上的滑槽进行滑动,在摄像机沿轨道架进行移动的同时,远程运维系统控制启动电动伸缩杆,使得电动伸缩杆带动摄像机进行上下运动;
17、与此同时启动第三电机、第二电机,第三电机带动转动轮进行转动,在转动轮转动的同时,由于转动轮与球状轴相接触,通过摩擦力的作用,带动球状轴在球形座的内部进行转动,第二电机带动转动轴进行转动,从而带动摄像机进行转动,进而实现了摄像机可以360度全方位转动的目的;然后在电动伸缩杆的配合作用下,摄像机可以进行全方位运动,从而达到了精确化摄取变电站现场运维画面的效果;
18、进一步的,所述第一缓冲装置包括运动框、运动杆、第一弹簧、连接台、筒体和缓冲扇叶,所述转动轴的上侧固定连接有运动框,所述运动框的内侧滑动连接有运动杆,所述运动杆的轴向外侧固定连接有连接台,所述运动杆的轴向外侧套接有第一弹簧,所述运动杆的轴向外侧设置有筒体,所述筒体通过矩形块与运动框为固定连接,所述运动杆的轴向外侧转动连接有缓冲扇叶,所述缓冲扇叶位于筒体的内部。
19、在摄像机进行运动的过程中,由于筒体的内部填充有液体,使得在第一弹簧弹簧力的作用下,以及缓冲扇叶在液体内转动时所产生的阻力作用,进而极大的减缓了摄像机在横向运动的惯性,从而达到了保持摄像机横向稳定性的效果;
20、进一步的,所述第二缓冲装置包括第一连接座、第一活动杆、转动杆、第二活动杆和第二连接座,所述连接台的上侧固定连接有第一连接座,所述第一连接座的外侧转动连接有第一活动杆,所述转动杆的上部内侧固定连接有转动杆,所述转动杆的轴向外侧转动连接有第二活动杆,所述第二活动杆的上侧转动连接有第二连接座,所述第二连接座与摄像机为固定连接。
21、进一步的,所述减震装置包括轨道壳、转动环、减震杆、第二弹簧、运动盒和限制装置,所述第二活动杆远离第一活动杆的一侧固定连接有轨道壳,所述转动杆的轴向外侧固定连接有转动环,所述转动环的轴向外侧固定连接有减震杆,所述外侧滑动连接有运动盒,所述减震杆的外侧套接有第二弹簧,所述运动盒在轨道壳的内部转动,所述轨道壳远离第二活动杆的一侧固定连接有限制装置。
22、在摄像机进行运动的过程中,由于惯性存在上下抖动的情形,在上下抖动时,通过第二连接座与第一连接座带动第二活动杆、第一活动杆、转动杆转动,由于转动杆与轨道壳之间固定连接有扭簧,使得在扭簧弹簧力的作用下,对摄像机的抖动存在一定缓冲作用;
23、与此同时转动杆在减震杆、运动盒在轨道壳内部相向转动,由于运动盒的内部填充有液体,使得转动杆在转动时所产生的抖动,在带动减震杆进行来回运动的过程中,液体从减震杆上的通孔,相向穿过,进而产生反向作用力,在反向作用力与第二弹簧弹簧力的作用下,对转动杆转动所产生的抖动进行高效减震;
24、进一步的,所述保护壳、线圈环、第三弹簧、磁力块和扭簧,所述轨道壳远离第二活动杆的一侧固定连接有保护壳,所述保护壳的内侧壁固定连接有线圈环,所述轨道壳的内侧滑动连接有磁力块,所述磁力块与线圈环之间固定连接有第三弹簧,所述转动杆与轨道壳之间固定连接有扭簧;
25、由于转动杆的内部设置有角度传感器,同时摄像机上下抖动程度大小与转动杆转动角度大小呈正向关系,又由于角度传感器与线圈环为电性连接,角度传感器通过转动角度大小控制线圈环内部通入的电流大小,使得线圈环内部通入的电流大小与转动杆转动角度大小呈正向关系,线圈环在通入电流后产生与磁力块相斥的磁场力,进而推动磁力块与运动盒相接触,从而达到限制运动盒转动的效果,使得可以通过摄像机抖动程度大小自动化适配限制抖动力大小,从而达到了高效保持摄像机在竖向稳定性的效果,进而实现了摄像机稳定摄取远程运维现场的画面的目的。
26、与现有技术相比,本发明提供了一种基于全景摄像的变电远程运维系统及其设备,具备以下有益效果:
27、1、该基于全景摄像的变电远程运维系统及其设备,通过全景采集模块、全景采集设备、预警模块、初检单元、物联网网关、控制箱体、匹配模块、云端故障数据、诊断单元、移动通讯模块和远程终端之间的配合作用,进而实现了可以根据全景画面自动化预警,并且自动化创建远程运维任务的目的,从而解决了现有的基于全景摄像的变电远程运维系统效率低下,实用效果不佳的问题。
28、2、该基于全景摄像的变电远程运维系统及其设备,通过轨道架、第一电机、滚动轮、摄像机、电动伸缩杆、第三电机、第二电机、转动轮、球状轴、球形座和转动轴之间的配合作用,进而实现了摄像机可以360度全方位转动的目的;然后在电动伸缩杆的配合作用下,摄像机可以进行全方位运动,从而达到了精确化摄取变电站现场运维画面的效果,解决了现有基于全景摄像的变电远程运维系统的摄像设备一般都采用固定式巡检的方式,导致其巡检的画面不够精确,造成巡检不佳的问题。
29、3、该基于全景摄像的变电远程运维系统及其设备,通过筒体、第一弹簧、缓冲扇叶和摄像机之间的配合作用,进而实现了极大的减缓了摄像机在横向运动的惯性的目的,从而达到了保持摄像机横向稳定性的效果。
30、4、该基于全景摄像的变电远程运维系统及其设备,通过第二连接座、第一连接座、第二活动杆、第一活动杆、转动杆和减震装置的作用下,进而实现了对转动杆转动所产生的抖动进行高效减震的目的,同时可以通过摄像机抖动程度大小自动化适配限制抖动力大小,从而达到了高效保持摄像机在竖向稳定性的效果,在保持横向稳定性与保持竖向稳定性的共同作用下实现了摄像机稳定摄取远程运维现场的画面的目的。
- 还没有人留言评论。精彩留言会获得点赞!