路侧单元通感一体化系统及混合波束成形方法与流程
本技术属于无线通信,具体地涉及一种面向车联网的毫米波的通感一体化系统及混合波束成形方法。
背景技术:
1、车联网是未来智能交通系统的重要组成部分,比如基于蜂窝车联网技术(cellular vehicle to everything,c-v2x)。c-v2x技术通过构建车路协同感知、通信和信息交互,以解决车与车、车与路之间的高可靠、低时延通信和高精度感知等难题。车辆配备了通信收发器和各种传感器,目的是同时提取环境信息,并与路侧单元、其他车辆甚至行人交换信息。通感一体化(integrated sensing and communications,isac)辅助的v2x网络可以将通信和感知功能集成到同一个信令框架下的硬件平台上,从而提高系统的频谱和硬件效率,获得集成增益,助力c-v2x技术的发展。
2、毫米波(mmwave)具有30-300ghz的大带宽,可同时为系统提供gbit/s的高容量通信和厘米级的高精度感知服务,为了进一步提高isac辅助的车联网系统的性能,如文献【p.kumari,j.choi,n.gonzález-prelcic and r.w.heath,"ieee 802.11ad-based radar:an approach to joint vehicular communication-radar system,"in ieeetransactions on vehicular technology,vol.67,no.4,pp.3012-3027,april 2018】中揭示一种方案,其利用频段为60ghz的ieee 802.11ad波形的特殊帧结构(重复golay互补序列构成的前导码和导频),分别设计单帧和多帧感知算法用于单目标和多目标车辆探测以及距离和速度估计,同时完成车与车之间的通信任务。然而上述设计采用的是模拟波束成形技术,基带处只发射一个数据流,只局限于一个车辆用户通信。
3、考虑到毫米波存在严重的路径损耗和降雨衰减,因此需要大规模多输入多输出(mmimo)技术来提供高增益定向波束,以弥补毫米波通信的不足。若采用每根天线配备单独射频链路的全数字波束形成器,会导致高昂的硬件成本和功耗。为了平衡系统性能和成本,在毫米波mimo通信中已提出了混合波束形成技术。又如文献【x.wang,z.fei,j.a.zhangand j.xu,"partially-connected hybrid beamforming design for integratedsensing andcommunication systems,"in ieee transactions on communications,vol.70,no.10,pp.6648-6660,oct.2022】中提出一种基于混合波束成形结构的毫米波通感一体化系统的方案,该方案在满足多个通信用户信干噪比的条件下,最小化感知目标到达角估计的克拉美罗界(cramér–rao bound,crb),但其中采用的是部分连接混合波束形成设计,使其系统的性能增益达不到最佳,并且只对一个目标进行感知,不满足车联网中多用户、多目标的通感融合要求。
技术实现思路
1、本技术的目的在于提出一种通感(通信感知)一体化系统及混合波束成形方法,该方法用于解决车联网中车路(v2i)场景下的高速率通信和高精度感知定位的通感融合问题。
2、为实现上述的问题,本技术采用如下的方案:
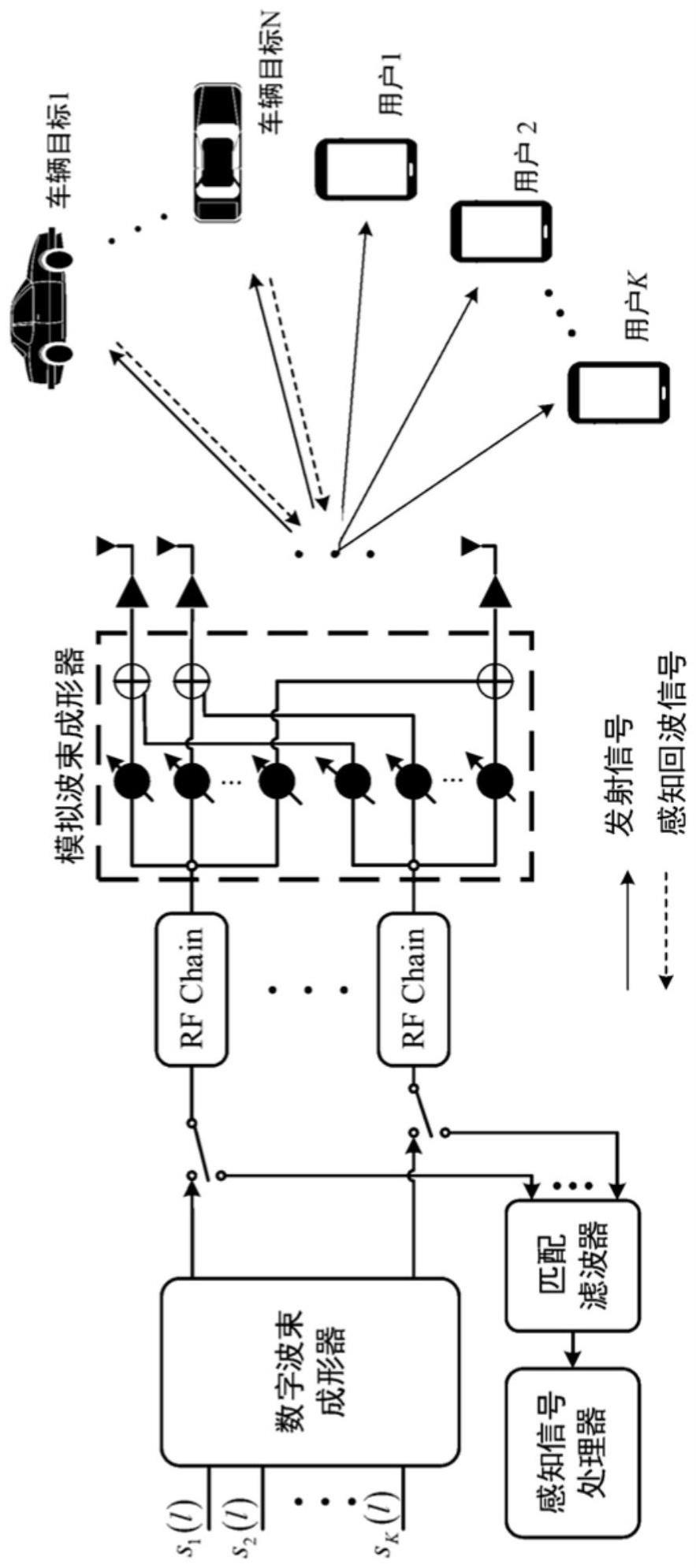
3、一种路侧单元通感一体化系统(rsu-isac),用于车联网,包括:数字波束成形器、射频链路(rf chain)、模拟波束形成器、发射天线阵列、接收天线阵列、匹配滤波器及感知信号处理器,所述射频链路电性连接所述数字波束成形器及所述模拟波束形成器,所述模拟波束形成器电性连接所述发射天线阵列,所述发射天线阵列用于发射信号,所述接收天线阵列用于接收响应所述发射信号的回波信号,所述匹配滤波器接收并响应所述回波信号经匹配滤波器滤波后传输至所述感知信号处理器,所述感知信号处理器基于接收的滤波后的信号经运算得到车辆信息,所述车辆信息包括车辆角度、时延参数或距离参数中的至少一种。
4、构建通信感知一体化信号的发射信号模型并通过该路侧单元通感一体化系统向下行多用户及多车辆目标发送,多车辆目标返回的回波信号经接收天线阵列接收回传至匹配滤波器,匹配滤波器将匹配滤波后的信号传输至感知信号处理器,感知信号处理器输出车辆角度、时延参数、距离参数;根据多用户中每个通信用户的接收信号模型推导通信用户的容量表达式;路侧单元通感一体化系统根据通信用户信道的强度分配加权因子,将所有通信用户的加权和速率作为通信性能指标;通过回波信号推导车辆角度、时延参数的fisher信息量,得到车辆角度、时延参数估计的crb;将多车辆的角度估计crb作为路侧单元通感一体化系统的感知性能指标,在满足其约束下设计数字波束形成器和模拟波束成形器;设置优化问题为:在多车辆角度估计的crb、系统总功率预算和模拟波束成形器的单模约束下优化数字波束形成器和模拟波束成形器以最大化多用户加权和速率;采用bcd算法对所述优化问题进行求解:先将最大化多用户加权和速率问题利用加权最小均方误差算法等价转化为最小化问题,设计精确罚函数下的黎曼共轭梯度算法优化求解模拟波束成形矩阵,再采用逐次凸逼近算法优化数字波束成形矩阵,通过交替优化上述模拟波束成形矩阵及数字波束成形矩阵,直到bcd算法收敛。
5、优选的,该数字波束成形器位于基带处。
6、优选的,该路侧单元通感一体化系统,在所述发射天线阵列处形成发射的通感一体化信号,所述通感一体化信号经所述发射天线阵列向下行多用户及多车辆目标发送。
7、本技术实施例提出一种利用上述路侧单元通感一体化系统的混合波束成形方法,所述方法包括如下步骤:
8、步骤s1:构建发射信号模型,并向下行多用户及多车辆目标发送;
9、步骤s2:构建毫米波通信信道模型,根据多用户中每个通信用户的接收信号模型推导通信用户的容量表达式;路侧单元通感一体化系统根据通信用户信道的强度分配加权因子,将所有通信用户的加权和速率作为通信性能指标;
10、步骤s3:感知信号处理器基于接收的车辆目标响应的回波信号并利用感知目标回波模型,经运算得到车辆角度、时延参数估计的crb,将多车辆的角度估计crb作为路侧单元通感一体化系统的感知性能指标,在满足其约束下设计数字波束形成器和模拟波束成形器;步骤s4:基于所述的路侧单元通感一体化系统、通信性能指标和感知性能指标,对优化问题进行建模;所述的优化问题是:在多车辆角度估计的crb、系统总功率预算和模拟波束成形器的单模约束下优化数字波束形成器和模拟波束成形器以最大化多用户加权和速率;
11、步骤s5:采用bcd算法求解所述优化问题。
12、该方法中设计了由数字波束成形器和模拟波束成形器组成的混合波束成形结构,使其在降低成本和功耗的条件下,能够最大化通信速率和感知精度;为实际部署在路边的单元同时完成下行链路通信和车辆目标感知探测提供了模型和技术支持。
13、优选的,该步骤s1中包括:
14、通信符号通过数字波束成形器进行预编码处理,再依次经过射频链路的上变频处理及模拟波束成形器的相位调制处理后,在发射天线阵列处形成发射的通信感知一体化信号,通信感知一体化信号经发射天线阵列向下行多用户及多车辆目标发送。
15、优选的,该通信符号在数字波束成形器中进行幅度和相位预编码处理后,再通过射频链路对信号进行上变频到60ghz,由模拟波束形成器进行单模相位调制,在发射天线阵列处形成通信感知一体化的发射信号,所述发射信号采用ieee 802.11ad波形结构。该方法与现有方案中的通信和雷达感知频谱共存方案相比,本技术通信和感知可以通过共用毫米波频段的ieee 802.11ad波形,使二者集成到同一硬件平台,共享频谱资源,获得集成增益;与现有的混合波束方案对比,本发明采用的是全连接的混合波束成形结构,在不增加功耗的条件下,与部分连接结构相比,系统能够有更大的性能增益。
16、优选的,该混合波束成形方法中,根据多用户中每个通信用户的接收信号模型推导通信用户的容量表达式,利用感知目标回波模型推导感知角度的crb。
17、优选的,该以最大化多用户加权和速率,并利用预设的算法进行求解直至算法收敛包括:
18、在多车辆的角度估计crb、系统总功率预算和模拟波束成形器的单模约束下优化数字波束形成器和模拟波束成形器,以最大化多用户加权和速率,
19、采用bcd算法进行求解。该方法利用感知目标回波模型,推导了多目标角度、时延参数估计的crb,并且多车辆目标角度参数crb的约束条件下最大化多用户通信的加权和速率。所考虑的模型更加符合车联网中多通信用户和多车辆感知目标的实际场景。采取bcd算法优化数字成形波束矩阵和模拟成形波束矩阵,所设计的算法复杂度较低,并且可以快速收敛。设计的算法可以在通信速率和雷达感知精度之间实现良好的性能折衷
20、优选的,该步骤s5中求解过程包括:
21、利用加权最小均方误差算法将最大化多用户加权和速率问题等价转化为最小化问题,
22、设计精确罚函数下的黎曼共轭梯度算法优化求解模拟波束成形矩阵,
23、采用逐次凸逼近算法优化数字波束成形矩阵,交替的优化模拟波束成形矩阵及数字波束成形矩阵,直到bcd算法收敛。
24、优选的,该混合波束成形方法中,
25、利用加权最小均方误差算法将最大化多用户加权和速率问题等价转化为最小化问题,
26、将转化后的最小化问题分解为第一子问题及第二子问题,
27、采用bcd算法框架求解第一子问题及第二子问题;
28、所述第一子问题为求解模拟波束成形矩阵,第二子问题为求解数字波束成形矩阵;
29、对第一子问题,由于存在单模约束,将模拟波束成形矩阵向量化后定义在黎曼流形空间中,再将目标角度的crb和系统功率约束作为第一子问题目标函数的惩罚函数,将第一子问题转化成无约束优化问题,采用黎曼共轭梯度算法优化求解模拟波束成形矩阵;
30、对第二子问题,由于目标角度估计的crb非凸约束存在,将此约束一阶泰勒展开近似转化为凸约束,再采用sca算法迭代优化数字波束成形矩阵,通过交替优化上述模拟波束成形矩阵和数字波束成形矩阵,直到bcd算法收敛。该方法中设定模拟波束成形矩阵及数字波束成形矩阵的初始值,交替迭代求解第一子问题及第二子问题,直到满足以下终止条件:迭代次数达到最大设定次数,或目标函数在相邻两次迭代计算出的差值小于设定的门限误差。
31、有益效果
32、在本技术的混合波束成形方法利用感知目标回波模型,推导了多目标角度、时延参数估计的crb,并且多车辆目标角度参数crb的约束条件下最大化多用户通信的加权和速率。所考虑的模型更加符合车联网中多通信用户和多车辆感知目标的实际场景。采取bcd算法优化数字成形波束矩阵和模拟成形波束矩阵,所设计的算法复杂度较低,并且可以快速收敛。设计的算法可以在通信速率和雷达感知精度之间实现良好的性能折衷。
- 还没有人留言评论。精彩留言会获得点赞!