一种针对轮询协议的多异构智能体抗干扰协同控制算法的制作方法
本发明涉及一种通信协议下的多智能体协同控制方法,特别是涉及轮询协议下的多异构智能体抗干扰协同控制方法,通过设计轮询协议减少邻域智能体间的信息交互,减轻网络负担,同时设计轮询间状态预测器,对未进行信息交互的邻域智能体状态信息进行预测,克服有限信息交互与控制精度间的矛盾问题;利用邻域间智能体状态信息设计分布式扩张状态观测器,对系统中的状态和由未知非线性、外界干扰等造成的总和扰动进行实时估计,并将总和扰动的估计值补偿到误差反馈控制器中,形成复合分布式控制器,确保对多智能体系统实现高精准控制,属于多智能体协同控制领域。
背景技术:
1、随着传感器技术、网络技术和计算机技术的迅速发展,大量具有一定感知、通信和计算能力的小型设备或系统进入了人们的工作和生活,这些设备或系统通常被称为智能体。为了更好地组织和管理这些智能体以完成特定的工作任务,多智能体系统行为与控制研究引发了包括数学、物理、生物、医学、军事、社会学和工程科学等领域学者的广泛关注。
2、在理想环境中,通信带宽是不受限的,但是在现实生活中,事实恰恰相反。在智能体的传输过程中,由于网络带宽受限、智能体传输相对复杂,往往会导致传输信号之间的冲突,进而会引发信号丢失等一系列现象。随着持续的调查研究,研究者发现使用传输协议可以减少由有限带宽产生的影响。目前常用的通信协议主要包括三种:1)轮询协议,其是一种周期协议,它可以使得智能体按照预先确定的固定环形顺序传输信息。在每一个循环周期中,按照时间顺序,每个智能体只有一次机会获得网络使用权限,并在下一时刻把访问权限传递给下一个智能体。2)随机通信协议,它既可以应用在连续时间的多智能体系统中,又可以应用在离散时间的多智能体系统中。随机通信协议规定所有智能体随机传递信息,每个时刻只能有一个智能体获取和传输信息,并且智能体之间的传输顺序是随机的。3)尝试一次丢弃协议,智能体上次发送数据和这次预发送数据的差值越大,越会优先获得网络的使用权限。可以理解尝试一次丢弃协议是规则为“按需分配”的协议。
3、在实际控制系统中,受环境扰动、通信噪声和负载变化等因素的影响,干扰是普遍存在的,并严重影响着控制系统的性能。在多智能体系统中,若某个或某一部分智能体受到干扰的影响,多智能体系统的控制性能和精度就会降低。随着协同控制实际应用范围的不断扩展,对于高精度抗干扰协同控制的需求与日俱增。抗干扰协同控制的主要目的是消除或减小干扰对多智能体系统协同控制性能的影响,以保证控制的可靠性与精准性。目前,抗干扰协同控制尚无统一、严格的定义,可以认为抗干扰协同控制是在协同控制任务的基础上考虑了干扰对多智能体系统的不利影响,并对该不利影响进行了抑制。根据控制任务的不同,抗干扰协同控制可进一步划分为抗干扰一致性控制、抗干扰编队控制、抗干扰包含控制等。其中抗干扰一致性控制是抗干扰协同控制的基本问题,是解决其他问题的关键。
4、本发明专利以多智能体系统为研究对象,提出一种针对轮询协议的多异构智能体系统抗干扰协同控制方法,用于解决含有通信约束及内外干扰等不确定性的多智能体协同控制,保证其顺利完成编队、一致性等任务。
技术实现思路
1、本发明的技术解决问题是:针对多智能体系统通信带宽约束、有限传输量与控制精度间的矛盾以及内外扰动影响等问题,提出一种针对轮询协议的多异构智能体系统抗干扰控制算法。首先,为每个智能体与自己的邻域智能体间的通信设计轮询协议,减少邻域范围内智能体间的信息交互,减轻整个通信网络的负担;其次,设计轮询间状态预测器,对没有使用通信网络权限的邻域智能体的状态进行预测;然后,利用邻域智能体间的相对误差状态设计分布式扩张状态观测器,对每个智能体系统中所有状态的总和扰动实施估计;最后,将总和扰动项的估计值补偿到状态反馈控制器中,抑制内外扰动对系统造成的不利影响。所设计方法解决了多异构智能体系统所面临的网络传输、内外扰动问题,确保多智能体系统实现精准的协同控制,提高了系统的鲁棒稳定性。
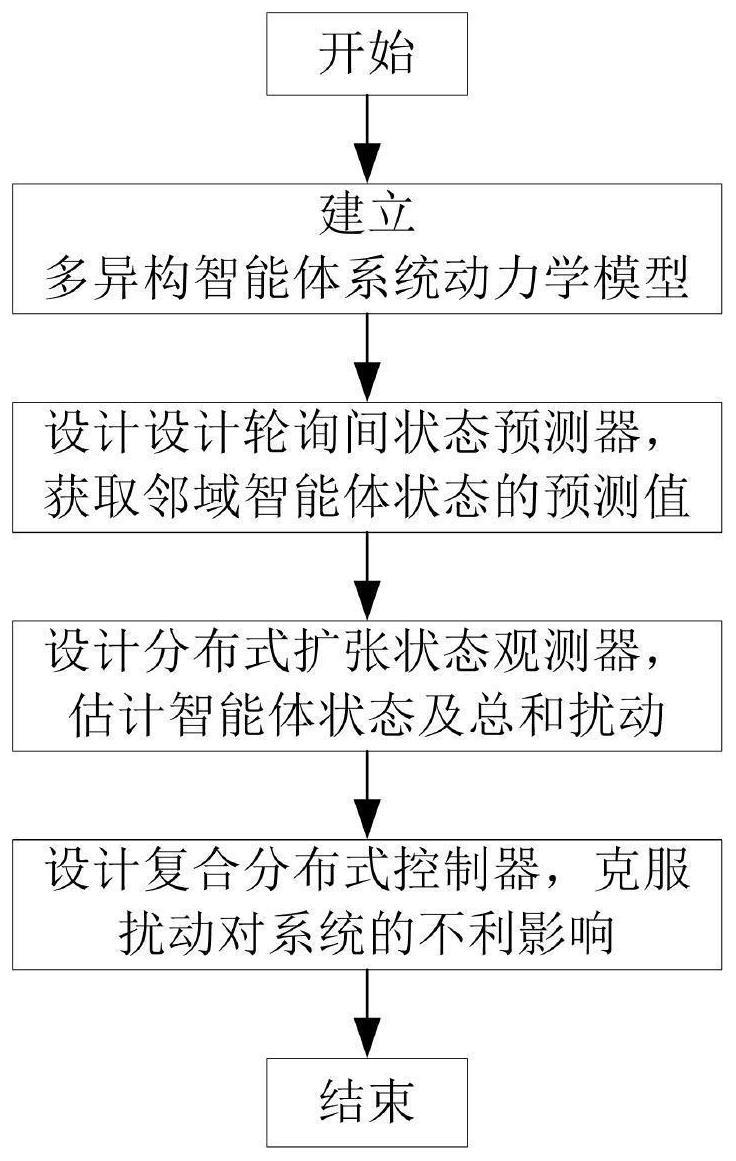
2、本发明的技术解决方案为:基于多智能体控制、通信协议和抗干扰控制理论,设计多智能体分布式协同控制器,其实现步骤如下:
3、第一步:构建多异构智能体系统动力学模型
4、本发明考虑由n个非线性异构机器人构成的多智能体系统,每个智能体被标记为1,...,n。针对第个智能体,其满足如下二阶动力学模型:
5、
6、式中,表示第i个智能体k时刻的状态信息;xi1(k)和xi2(k)分别表示第i个智能体系统的位移量和速度量;表示第i个智能体k+1时刻的状态信息;表示m维实向量空间;表示第i个智能体的控制输入;表示p维实向量空间;表示第i个智能体中与状态相关但形式未知的非线性项;表示作用于第i个智能体的外界干扰项;表示第i个智能体的输出状态;和为第i个智能体的系数矩阵;和分别表示m×m,m×p和p×m维实矩阵空间。显然,由于每个智能体所拥有不同的状态信息、控制输入、非线性项、外界干扰、输出状态以及系数矩阵,因此该多智能体系统属于异构的。
7、智能体间的信息交互行为由有向图θ=(ν,ε)描述,其中ν={1,...,n}是节点集合,是边的集合,是边的集合。在图θ=(ν,ε)中,用节点i表示第i个智能体,用边(i,j)表示从到的信息交互。若(i,j)∈ε,则表示节点j可以获取并利用与节点i的相对信息,并将i称为j的邻居节点,用来表示图θ=(ν,ε)对应的邻接矩阵。
8、考虑通信约束问题,多智能体系统信息交互过程中难免受到网络通信带宽的影响。为了减轻整个智能体系统的通信负担,降低网络诱导现象,我们采用轮询协议。轮询协议是一个周期协议,它可以使得智能体按照预先确定的固定环形顺序传输信息。在每一个循环周期中,按照时间顺序,每个智能体只有一次机会获得网络使用权限,并在下一时刻把访问权限传递给下一个智能体。本发明中设轮询协议的周期设为智能体的邻域智能体的个数ni。设ζi,k是第i个智能体的邻域智能体,采用轮询协议后,ζi,k满足且当k∈{1,...,ni}时,ζi,k满足ζi,k=k,即
9、ζi,k=mod(k-1,ni)+1 (2)
10、式中,mod(k-1,ni)表示求余函数,其可以返回k-1与ni相除的余数。
11、第二步:设计轮询间状态预测器
12、在第一步中,虽然我们采用具有周期性的轮询协议减轻了整个网络的通信负担,但是无法保证邻域智能体间实时实施信息交互,这将必然降低整个多智能体系统的控制效果。为了解决有限带宽资源有效分配与多智能体精准控制间的矛盾问题,本发明针对轮询协议通信问题,为第i个智能体设计如下形式的轮询间状态预测器:
13、
14、式中,表示k时刻第i个智能体所预测的与其相邻的第j个智能体的状态信息;t为轮询周期数;j∈{1,...,ni}表示与智能体i相邻的第j个智能体;zj2(τ)表示第j个智能体xj2(τ)在τ时刻的估计值,其具体计算过程由下一步所示。
15、第三步:设计分布式扩张状态观测器
16、将第i个智能体系统中的总和扰动fi(xi(k))+di(k)设为新的系统状态xi3(k),且hi(xi(k),di(k))=fi(xi(k+1))+di(k+1)-fi(xi(k))-di(k),则式(1)可扩张为如下形式:
17、
18、式中,表示扩张后系统的状态信息;和为扩张后系统的系数矩阵。
19、设误差量本发明提出如下形式的基于轮询间预测器的分布式扩张状态观测器
20、
21、式中,表示系统状态的估计值;表示分布式扩张状态观测器的增益矩阵。
22、第四步:复合分布式控制器设计
23、为了克服未知总和扰动对智能体系统响应速度及稳定性的影响,最终实现对多智能体系统精准协同控制,本发明采用复合抗干扰的思想,将相邻智能体之间的状态误差作为反馈控制形式,并将分布式扩张状态观测器估计出的非线性不确定项作为前馈项实时补偿到控制器中。第i个智能体系统中的复合分布式控制器设计为:
24、
25、式中,αi和βi表示控制器可调增益。
26、本发明与现有技术相比有益效果为:
27、(1)利用轮询间预测器对未具有通信网络使用权的智能体输出状态进行预测,避免了因无法与邻域智能体进行信息交互而造成协同误差过大的现象;
28、(2)利用智能体邻域信息基于轮询间预测器设计分布式扩张状态观测器,对智能体中的状态及未知总和扰动进行实时估计;
29、(3)将总和扰动的估计值补偿到协同误差反馈控制器中,构成复合分布式控制器,克服了总和扰动对系统造成的不利影响,实现多智能体系统精准协同控制。
- 还没有人留言评论。精彩留言会获得点赞!