基于车路协同的RTK定位方法、装置及计算机设备与流程
本发明涉及车辆定位方法,更具体地说是指基于车路协同的rtk定位方法、装置及计算机设备。
背景技术:
1、rtk高精度定位技术都是构成自动驾驶和车路协同的关键技术之一。
2、当前每台有rtk(实时动态,real-time kinematic)高精定位需求的车辆需要在配置rtk高精度定位模组后,通常还需要购买实地部署的rtk基站或者云rtk基站服务,并配置网络通信功能,以获取rtk基站云平台发送的修正数据或采集的载波相位观测值,再结合卫星观测数据与基准站发送的数据进行相位差分定位才能实现rtk定位功能,极大增加了rtk高精度定位功能的实现成本和推广难度。另外,对于每台有rtk高精定位需求的车辆均具备可靠的实时联网的功能要求,也会使得车辆的高精度定位功能实现的成本增加,且带来因网络通信基站缺失、部分道路网络延迟、数据传输不稳定和易受干扰等问题,也较难满足自动驾驶或车路协同通讯控制的高可靠性要求。
3、因此,有必要设计一种新的方法,实现基于道路车路协同系统所具备的车路协同场景功能,并融合rtk基站功能,为道路车辆提供基于c-v2x高可靠、低延迟性能的rtcm(实时配置管理,real time configuration management)数据透传。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供基于车路协同的rtk定位方法、装置及计算机设备。
2、为实现上述目的,本发明采用以下技术方案:基于车路协同的rtk定位方法,包括:
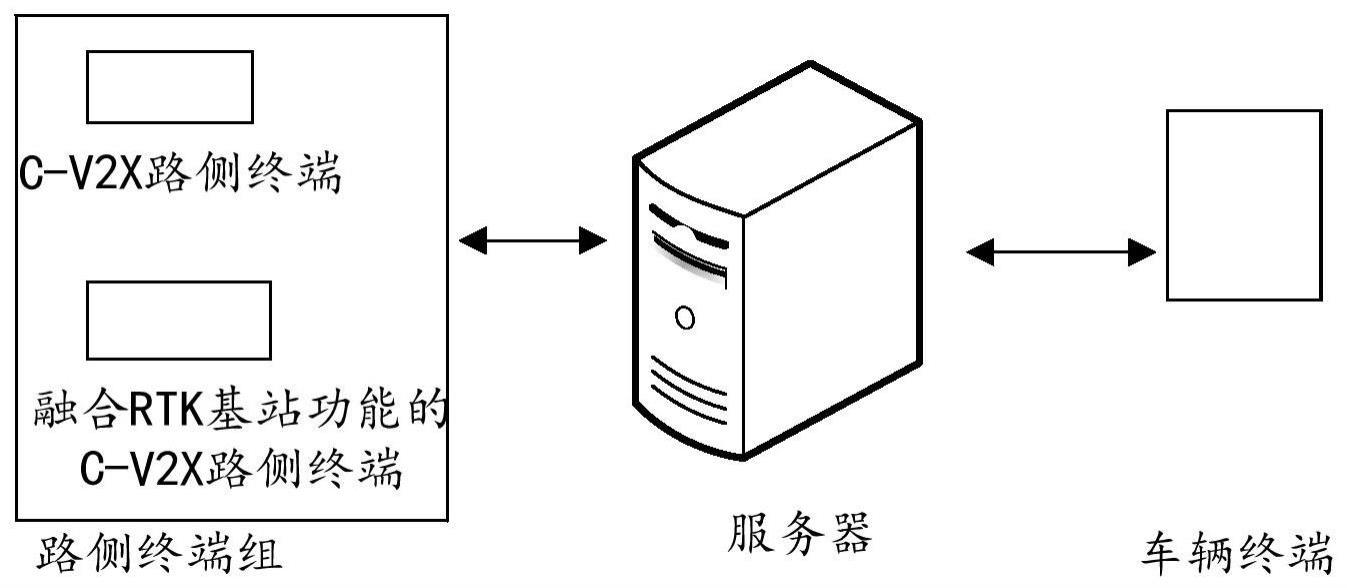
3、在目标道路每间隔小于1km安装至少一台c-v2x路侧终端,在每间隔不大于10km安装至少一台融合rtk基站功能的c-v2x路侧终端,以形成目标道路的路侧终端组;
4、接收由目标道路的路侧终端组所获取的rtcm数据;
5、将所述rtcm数据通过网络传输至车辆终端。
6、其进一步技术方案为:所述融合rtk基站功能的c-v2x路侧终端将所述rtcm数据通过网线共享给所述c-v2x路侧终端。
7、其进一步技术方案为:所述融合rtk基站功能的c-v2x路侧终端将所述rtcm数据通过c-v2x广播至所述目标道路内的车辆终端的针对配置有高精度模组5g c-v2x t-box的车路协同和无人驾驶车辆。
8、其进一步技术方案为:所述将所述rtcm数据通过网络传输至车辆终端,包括:
9、获取配置有符合要求的精度模组和网络功能但并不具备c-v2x功能的rtk定位需求车辆的定位数据;
10、根据所述定位数据确定配置有符合要求的精度模组和网络功能但并不具备c-v2x功能的rtk定位需求车辆所在区域;
11、根据所在区域通过网络传输对应的rtcm数据至车辆终端。
12、其进一步技术方案为:所述根据所在区域通过网络传输对应的rtcm数据至车辆终端,包括:
13、根据所在区域与所述rtcm数据中经纬度信息进行比对,以确定一组距离所述车辆终端最近的融合rtk基站功能的rtcm数据,以得到待传输数据;
14、通过网络传输所述待传输数据至车辆终端。
15、其进一步技术方案为:所述将所述rtcm数据通过网络传输至车辆终端之后,还包括:
16、根据所述rtcm数据判断所述路测终端中的融合rtk基站功能的c-v2x路侧终端的数据是否漏发超过设定时间;
17、若所述路测终端的融合rtk基站功能的c-v2x路侧终端的数据漏发超过设定时间,则确定所述融合rtk基站功能的c-v2x路侧终端的功能异常;
18、将所述rtcm数据以及所述定位数据构成的数据组按照所述定位数据排成队列;
19、在所述队列中剔除功能异常的数据,以形成目标rtcm数据队列。
20、其进一步技术方案为:所述在所述队列中剔除功能异常的数据,以形成目标rtcm数据队列之后,还包括:
21、根据定位数据与所述目标rtcm数据队列中经纬度信息进行比对,以确定一组距离每台c-v2x路侧终端的经纬度距离的融合rtk基站功能的c-v2x路侧终端的ip,以得到目标ip;
22、发送所述目标ip至c-v2x路侧终端,以使得c-v2x路侧终端通过网线及交换机局域网络访问获取到所述目标ip对应的融合rtk基站功能的c-v2x路侧终端的rtcm数据,c-v2x路侧终端再通过c-v2x pc5直连通信广播至c-v2x覆盖范围内配置有符合设定要求的精度模组5g c-v2x t-box的车辆。
23、本发明还提供了基于车路协同的rtk定位装置,包括:
24、安装单元,用于在目标道路每间隔小于1km安装至少一台c-v2x路侧终端,在每间隔不大于10km安装至少一台融合rtk基站功能的c-v2x路侧终端,以形成目标道路的路侧终端组;
25、接收单元,用于接收由目标道路的路侧终端组所获取的rtcm数据;
26、传输单元,用于将所述rtcm数据通过网络传输至车辆终端。
27、本发明还提供了一种计算机设备,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法。
28、本发明还提供了一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时可实现上述的方法。
29、本发明与现有技术相比的有益效果是:本发明通过在目标道路每间隔小于1km安装至少一台c-v2x路侧终端,在每间隔不大于10km安装至少一台融合rtk基站功能的c-v2x路侧终端,保证数据获取可靠性的冗余设计要求,对于接收的rtcm数据,可通过网络传输至车辆终端,还可以由融合rtk基站功能的c-v2x路侧终端将所述rtcm数据通过c-v2x广播至所述目标道路内的车辆终端,实现基于道路车路协同系统所具备的车路协同场景功能,并融合rtk基站功能,为道路车辆提供基于c-v2x高可靠、低延迟性能的rtcm数据透传。
30、下面结合附图和具体实施例对本发明作进一步描述。
技术特征:
1.基于车路协同的rtk定位方法,其特征在于,包括:
2.根据权利要求1所述的基于车路协同的rtk定位方法,其特征在于,所述融合rtk基站功能的c-v2x路侧终端将所述rtcm数据通过网线共享给所述c-v2x路侧终端。
3.根据权利要求1所述的基于车路协同的rtk定位方法,其特征在于,所述融合rtk基站功能的c-v2x路侧终端将所述rtcm数据通过c-v2x广播至所述目标道路内的车辆终端的针对配置有高精度模组5g c-v2x t-box的车路协同和无人驾驶车辆。
4.根据权利要求1所述的基于车路协同的rtk定位方法,其特征在于,所述将所述rtcm数据通过网络传输至车辆终端,包括:
5.根据权利要求4所述的基于车路协同的rtk定位方法,其特征在于,所述根据所在区域通过网络传输对应的rtcm数据至车辆终端,包括:
6.根据权利要求4所述的基于车路协同的rtk定位方法,其特征在于,所述将所述rtcm数据通过网络传输至车辆终端之后,还包括:
7.根据权利要求4所述的基于车路协同的rtk定位方法,其特征在于,所述在所述队列中剔除功能异常的数据,以形成目标rtcm数据队列之后,还包括:
8.基于车路协同的rtk定位装置,其特征在于,包括:
9.一种计算机设备,其特征在于,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的方法。
10.一种存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时可实现如权利要求1至7中任一项所述的方法。
技术总结
本发明实施例公开了基于车路协同的RTK定位方法、装置及计算机设备。所述方法包括:在目标道路每间隔小于1KM安装至少一台C‑V2X路侧终端,在每间隔不大于10KM安装至少一台融合RTK基站功能的C‑V2X路侧终端,以形成目标道路的路侧终端组;接收由目标道路的路侧终端组所获取的RTCM数据;将所述RTCM数据通过网络传输至车辆终端。通过实施本发明实施例的方法可实现基于道路车路协同系统所具备的车路协同场景功能,并融合RTK基站功能,为道路车辆提供基于C‑V2X高可靠、低延迟性能的RTCM数据透传。
技术研发人员:董志远,戴华,杜艳芬,高介敦,鲁铭星,孙单智,杨松,汪心渊,娄刃,韩霄
受保护的技术使用者:浙江交科交通科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!