一种QAM弱信号的载波相位跟踪方法与流程
本发明涉及qam信号接收设备研制领域,具体的说是一种qam弱信号的载波相位跟踪方法,其可应用在各类qam信号接收终端类设备的研制中。
背景技术:
1、正交幅度调制qam是一种幅度和相位联合控制的正交调制技术,同时利用幅度与相位来传递信息,因此在最小距离相同的条件下可实现更高的频带利用率,其广泛应用于微波通信、卫星通信、深空通信等领域,相应的通信系统可能会工作在高动态低信噪比的环境下。高动态会引入较大频偏及频率变化率,其会导致星座点相位在短时间内快速变化。传统qam信号载波跟踪环路通常在跟踪初期采用鉴频鉴相环路:当检测到相邻符号相位转动过大时直接将鉴相结果至零,其同时具备鉴频和鉴相能力;信号频率跟踪稳定后采用锁相环路(仅鉴相)进行精细跟踪。鉴频鉴相时若对所有星座点进行处理,其能容忍的相位误差有限(高阶qam信号相位跟踪精度要求更高),而qam信号外围的星座点受相位误差影响较小,因此鉴频鉴相通常进行极性判决取星座图外围的星座点,但相应跟踪可用符号概率减少(qam信号阶数越高,星座图外围星座点概率越低),等效于传统跟踪环路输入的鉴相信息信噪比降低,而高动态环境下又要求大的环路带宽,因此高动态低信噪比下传统跟踪环路跟踪不稳定易失锁。
技术实现思路
1、针对背景技术中介绍的传统qam信号载波相位跟踪环路在高动态低信噪比环境下跟踪不稳定易失锁的缺陷,本发明提出了一种qam弱信号的载波相位跟踪方法,能够实现对载波相位进行更高精度的跟踪,解决了现有技术存在的高动态低信噪比下传统跟踪环路跟踪不稳定易失锁的技术问题。
2、本发明的技术方案如下:
3、一种qam弱信号的载波相位跟踪方法,所述方法包括以下步骤:
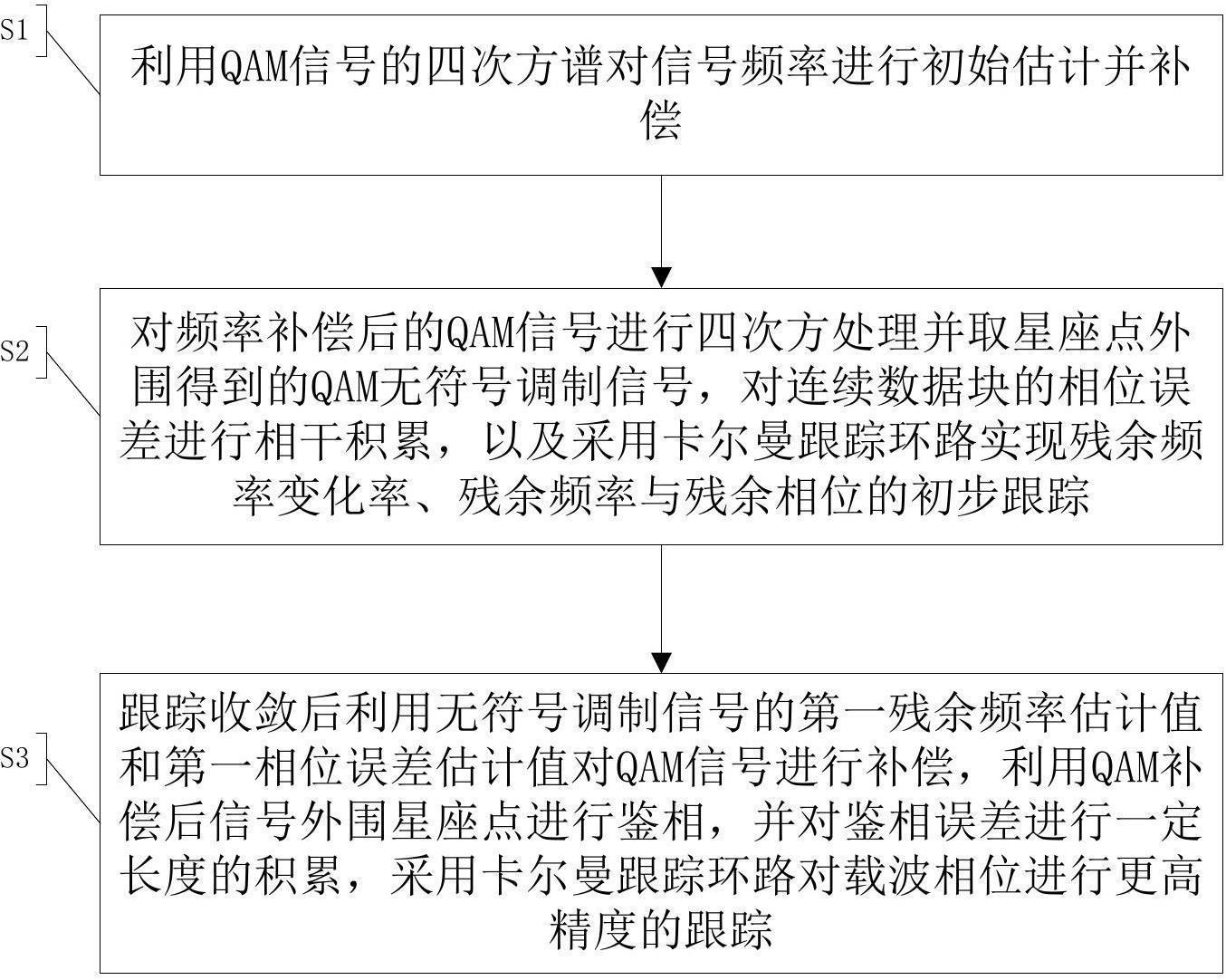
4、根据qam信号的四次方谱,对qam信号的信号频率进行初始估计并补偿,输出qam信号;
5、在环路更新周期t内,对qam信号的星座图中外围信号点进行四次方处理,输出无符号调制的qam信号;
6、对qam信号 中的连续数据块的相位误差进行相干累积和采用卡尔曼跟踪环路跟踪,得到qam信号的第一信号参数估计值,所述第一信号参数估计值包括第一残余频率估计值和第一相位误差估计值;
7、根据所述第一信号参数估计值,对qam信号进行补偿,输出qam信号,然后对qam信号星座图中的外围信号点进行鉴相、相干累积以及采用卡尔曼跟踪环路跟踪,得到qam信号的第二信号参数估计值,所述第二信号参数估计值包括第二残余频率估计值、第二残余相位误差估计值,所述第二信号参数估计值的精度高于第一信号参数估计值的精度。
8、本发明通过上述步骤,在跟踪初始阶段,对一定长度qam信号的外围星座点做四次方可得到呈三角函数波形的无符号调制信号,通过相干累积与fft运算可估计得到信号频率与相位,采用卡尔曼跟踪环路能够实现高动态qam信号相位与频率的跟踪。
9、进一步地,根据qam信号的四次方谱,对qam信号的信号频率进行初始估计并补偿,具体包括:
10、设qam信号的信号采样率为,采样间隔为,所述qam信号为qam基带信号;
11、将qam信号进行四次方后与相位信息相乘,对乘积进行求和后再除以频率估计所采用的数据长度,得到qam信号的快速傅里叶变换结果,其表达式为:
12、 (1)
13、(1)式中,为信号频率估计所采用的数据长度,为相位信息,n为信号频率估计所采用的数据点数,变量i为信号采样点序号,变量k为信号频谱谱线序号;
14、查找快速傅里叶变换结果的绝对值的最大值所对应的信号频谱谱线序号,其表达式为:
15、 (2)
16、在信号频谱谱线序号小于信号频率估计所采用的数据点数n的半数的情况下,信号频率估计值为信号频谱谱线序号除以数据长度的倍数值后的商值后再与信号采样率之间相乘的乘积,在信号频谱谱线序号大于或等于信号频率估计所采用的数据点数n的半数的情况下,信号频率估计值为信号频谱谱线序号与数据长度之间的差值与四倍数据长度相除所得到的商值再与信号采样率之间相乘的乘积,qam信号的信号频率估计值的表达式为:
17、, (3)
18、(3)式中,为qam信号的信号采样率,为信号频率估计所采用的数据长度,为信号频谱谱线序号;
19、将qam信号与相位信息相乘,得到频率补偿后的qam信号,其表达式为:
20、 (4)
21、(4)式中,为信号频率估计值,为信号采样率,变量i为信号采样点序号。
22、进一步地,对信号补偿后的qam信号的星座图中的外围信号点进行四次方处理,具体包括:
23、取qam信号星座图最外围星座点与相邻星座点的幅度平均值作为qam信号幅度判决门限;
24、判断信号补偿后的qam信号的绝对值是否大于或等于qam信号幅度判决门限,在信号补偿后的qam信号的绝对值大于或等于qam信号幅度判决门限的情况下,选取信号补偿后的qam信号的星座图中的外围信号点进行四次方处理,得到无符号调制的qam信号。
25、进一步地,对qam信号 中连续数据块的相位误差进行相干累积和采用卡尔曼跟踪环路跟踪,得到qam信号的第一信号参数估计值,具体包括:
26、对连续数据块进行相干累积和快速傅里叶变换处理,得到残余相位误差估计值, 所述连续数据块的数据采样点数为n点;
27、根据所述残余相位误差估计值,采用多阶卡尔曼跟踪环路,对qam信号进行信号残余频率变化率、残余频率和残余相位误差的初步跟踪,得到第一残余频率估计值和第一相位误差估计值。
28、进一步地,根据所述第一信号参数值,对qam信号进行补偿,得到qam信号,然后对qam信号星座图中的外围信号点进行鉴相、相干累积以及采用卡尔曼跟踪环路跟踪,得到qam信号的第二信号参数估计值,具体包括:
29、将qam信号与相位信息相乘,得到补偿后的qam信号,其表达式为:
30、, (5)
31、(5)式中,为第一残余频率估计值,为第一相位误差估计值,n为信号采样点数;
32、对补偿后的qam信号的星座图外围信号点进行极性判决鉴相处理,得到鉴相序列dis(i);
33、将鉴相序列dis(i)除以数据采样点数n,得到补偿后的qam信号信号的残余相位误差估计值;
34、根据所述残余相位误差估计值,采用多阶卡尔曼跟踪环路,对qam信号的残余频率变化率、残余频率和残余相位误差进行精确跟踪,得到第二残余频率估计值、第二残余相位误差估计值。
35、进一步地,对qam信号的星座图外围信号点进行极性判决鉴相处理,得到鉴相序列,具体包括:
36、在qam信号的绝对值大于或等于qam信号幅度判决门限的情况下,将qam信号除以与qam信号星座图中距离最近的理论星座信号点后取其虚部,得到鉴相序列;所述qam信号幅度判决门限为星座最外围星座点与相邻星座点的幅度平均值。
37、进一步地,对连续数据块进行相干累积和快速傅里叶变换处理,得到残余相位误差估计值,具体包括:
38、将qam信号 中连续数据块划分成m段,每段为l点数据,然后对每段数据中的l点数据进行相干累积,得到累积后的qam信号,其表达式为:
39、, (6)
40、(6)式中,变量为数据段序号,其取值范围为[0,m],m为连续数据块中的数据段数,变量为数据点数序号,l为每个数据段中的数据点数;
41、对相干累积后的qam信号进行快速傅里叶变换处理,得到快速傅里叶变换处理后的qam信号,其表达式为:
42、 , (7)
43、(7)式中,变量为为数据段序号,为数据段数,变量为数据点数序号;
44、计算快速傅里叶变换处理后的qam信号的绝对值中的最大值所对应的数据点数序号,并通过所述数据点数序号计算获得经相干累积后的qam信号的残余相位误差测量值;其中,所述数据点数序号的表达式为:
45、 , (8)
46、所述残余相位误差测量值的表达式为:
47、 (9)。
48、进一步地,所述卡尔曼跟踪环路,其跟踪方法包括以下步骤:
49、根据预测的信号残余误差向量,计算信号残余误差向量的先验协方差矩阵并对其进行更新;
50、估计下一跟踪周期的残余相位误差估计值,并对信号频率与相位偏差进行修正;
51、按照上述步骤持续进行多个周期跟踪并收敛后,得到频率估计值和相位误差估计值,所述待跟踪信号为qam信号或qam信号。
52、进一步地,根据预测的信号残余误差向量,计算信号残余误差向量的先验协方差矩阵并对其进行更新,具体包括:
53、设待跟踪信号在第k-1次跟踪周期起始时刻的信号残余误差向量为,的表达式为:
54、 , (10)
55、(10)式中,为第k-1次跟踪周期起始时刻的残余频率变化率估计值,为第k-1次跟踪周期起始时刻的残余频率估计值,为第k-1次跟踪周期起始时刻的残余相位估计值;
56、将待跟踪信号的信号残余误差向量与信号残余误差向量的状态转移矩阵相乘后,估计出第k次跟踪周期起始时刻的信号残余误差向量,获得第k次跟踪周期起始时刻的残余频率估计值以及残余相位误差估计值,的表达式为:
57、 , (11)
58、(11)式中,为待跟踪信号的信号残余误差向量的状态转移矩阵,其表达式为:
59、, (12)
60、将信号残余误差向量的状态转移矩阵依次与第k-1次跟踪起始时刻的信号残余误差向量的协方差矩阵、残余误差向量的状态转移矩阵的转置矩阵相乘后的乘积再与过程协方差矩阵相加,所得的结果为第k次跟踪起始时刻的信号残余误差向量的先验协方差矩阵,其表达式为:
61、, (13)
62、(13)式中,为第k-1次跟踪起始时刻的信号残余误差向量的协方差矩阵,q为过程协方差矩阵,其表达式为:
63、(14)
64、(14)式中,为信号的射频频率,为光速,为接收机晶振的相位,为频率噪声功率谱密度,为信号来向的加速度噪声,为环路跟踪周期;
65、将信号残余误差向量的先验协方差矩阵依次与测量矩阵、卡尔曼增益相乘后的乘积,然后计算乘积先验协方差矩阵之间的差值,得到更新后的协方差矩阵,其表达式为:
66、 (15)
67、(15)式中,为残余相位误差测量值的测量方差,为信号残余误差向量的先验协方差矩阵,为测量矩阵,为测量矩阵,其表达式为:, 为卡尔曼增益,其表达式为:
68、, (16)
69、进一步地,估计下一跟踪周期的残余相位误差估计值,并对信号频率与相位偏差进行修正,具体包括:
70、对第k次跟踪周期的待跟踪信号的残余载波相位进行估计,得到残余相位误差估计值或残余相位误差估计值,所述待跟踪信号为qam信号或qam信号;
71、计算测量矩阵与信号残余误差向量预测值相乘的乘积,然后计算乘积与残余相位误差测量值之间的差值,再将差值与卡尔曼增益相乘后与信号残余误差向量预测值相加,所得的结果为第k次跟踪起始时刻经卡尔曼跟踪估计的信号残余误差向量,其表达式为:
72、 , (17)
73、(17)式中,为测量矩阵,为卡尔曼增益,其表达式为:
74、 , (18)
75、(18)式中,为残余相位误差测量值的测量方差,为信号残余误差向量的先验协方差矩阵;
76、根据第k次跟踪周期起始时刻的残余频率估计值以及残余相位误差估计值,将待跟踪信号与相位信息相乘,得到修正后的qam信号,所述qam信号为其表达式为:
77、,(19)
78、(19)式中,为修正前的待跟踪信号,为信号采样点数,为采样间隔,变量为信号采样点序号,变量为环路跟踪周期序号。
79、本发明的有益效果:
80、1.本发明通过在跟踪初始阶段,对qam信号外围星座点进行四次方处理消除符号影响,进而可以积累较长时间数据对信号频率与载波相位进行相干估计,估计精度高,估计后采用卡尔曼滤波跟踪可实现对高动态低信噪比qam信号的快速稳健跟踪收敛,解决了传统的鉴频鉴相与锁相环路在跟踪初始阶段只能采用单个符号进行频率与相位估计,估计精度差,需要窄的锁相环路带宽,但高动态场景又需要宽的锁相环路带宽,其在高动态低信噪比环境下跟踪不稳健的技术问题。
81、2.本发明通过在跟踪过程中,取外围星座点进行残余相位估计,并通过较长时间积分提高估计精度,估计后采用卡尔曼滤波跟踪实现对高动态低信噪比qam信号的高精度稳健跟踪,解决了传统极性判决锁相环路同样取星座外围点进行相位估计,但通常采用单个符号进行估计,由于外围星座点出现概率较低,尤其是高阶boc情况下,其估计精度差,同样存在难以同时兼顾高动态与低信噪比两种环境的问题以及在高动态低信噪比环境下跟踪不稳健的技术问题。
82、3.本发明由于积累了一定长度的信号,环路输入信噪比大幅提升,相位和频率跟踪精度与稳定性大幅提升;频率和相位跟踪锁定后利用外围星座点进行鉴相,并对鉴相误差进行一定长度的积累,提高信噪比,因此采用卡尔曼跟踪环路对载波相位进行更高精度的跟踪。
- 还没有人留言评论。精彩留言会获得点赞!