一种多传感器时间同步方法、装置、设备及存储介质与流程
本发明涉及通信,尤其涉及一种多传感器时间同步方法、装置、设备及存储介质。
背景技术:
1、在机器人、自动驾驶车辆等需要感知环境的可移动设备上,通常需要设置多个传感器,比如摄像头、毫米雷达波等来采集周围环境的图像数据,基于多个摄像头采集的图像数据进行数据融合感知,获得周围环境的感知结果,由于需要将多摄像头图像数据进行融合,为了保证感知结果的准确性,多传感器时间同步的精度成为关键因素。
2、现有多传感器时钟同步大部分仅在应用层层面进行解决,然而应用层时间同步存在由于传感器数据传输过程中周期噪声方差过大和时钟偏移不确定,传感器时间戳数据失真,最终影响时间同步的准确性的问题。
技术实现思路
1、本发明提供一种多传感器时间同步方法、装置、设备及存储介质,以解决现有技术中存在由于传感器数据传输过程中周期噪声方差过大和时钟偏移不确定,传感器时间戳数据失真,最终影响时间同步的准确性的问题。
2、为实现上述目的,本发明实施例提供了一种多传感器时间同步方法,包括:
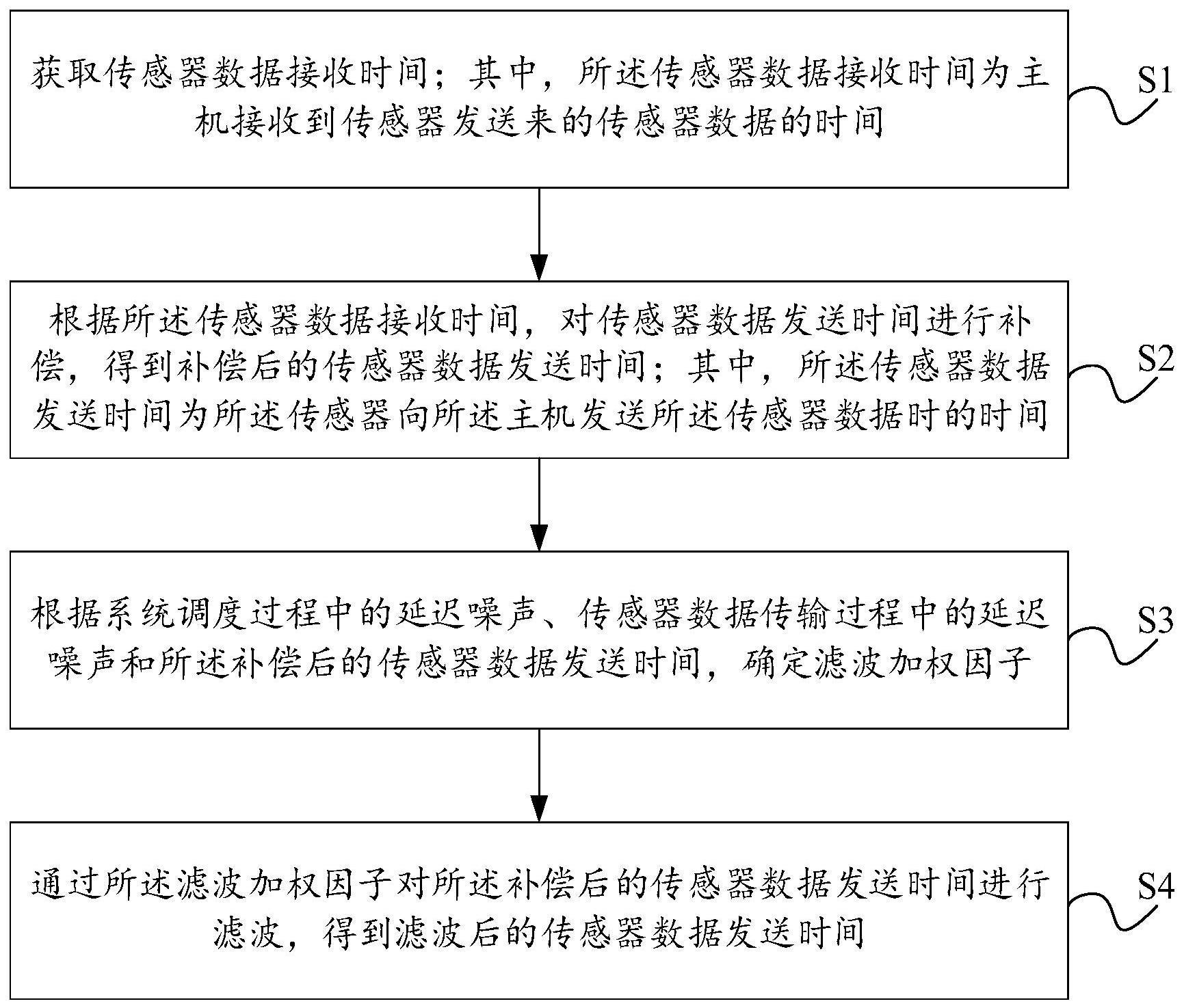
3、获取传感器数据接收时间;其中,所述传感器数据接收时间为主机接收到传感器发送来的传感器数据的时间;
4、根据所述传感器数据接收时间,对传感器数据发送时间进行补偿,得到补偿后的传感器数据发送时间;其中,所述传感器数据发送时间为所述传感器向所述主机发送所述传感器数据时的时间;
5、根据系统调度过程中的延迟噪声、传感器数据传输过程中的延迟噪声和所述补偿后的传感器数据发送时间,确定滤波加权因子;
6、通过所述滤波加权因子对所述补偿后的传感器数据发送时间进行滤波,得到滤波后的传感器数据发送时间。
7、作为上述方案的改进,所述根据所述传感器数据接收时间,对传感器数据发送时间进行补偿,得到补偿后的传感器数据发送时间,包括:
8、通过所述主机与所述传感器之间的数据交互获取所述主机与所述传感器之间的时钟偏移量和通信延迟时间;
9、根据下式,对传感器数据发送时间进行补偿,得到补偿后的传感器数据发送时间:
10、t=trcv-tshift-d
11、其中,trcv表示传感器数据接收时间,tshift表示时钟偏移量,d表示通信延迟时间。
12、作为上述方案的改进,所述通过所述主机与所述传感器之间的数据交互获取所述主机与所述传感器之间的时钟偏移量和通信延迟时间,包括:
13、向传感器发送携带时间戳的报文,以使所述传感器在接收到所述报文的预设等待时长后,返回所述报文;
14、接收到返回的所述报文;
15、解析所述报文,得到主机发送报文时间、传感器接收报文时间、传感器发送报文时间和主机接收报文时间;
16、根据所述主机发送报文时间、所述传感器接收报文时间、所述传感器发送报文时间和所述主机接收报文时间,计算所述主机与所述传感器之间的时钟偏移量和通信延迟时间。
17、作为上述方案的改进,所述根据所述主机发送报文时间、所述传感器接收报文时间、所述传感器发送报文时间和所述主机接收报文时间,计算所述主机与所述传感器之间的时钟偏移量和通信延迟时间,包括:
18、利用所述主机与所述传感器之间的时钟偏移量和发送延迟,建立所述主机发送报文时间和所述传感器接收报文时间的第一关系式;
19、利用所述主机与所述传感器之间的时钟偏移量和接收延迟,建立所述传感器发送报文时间和所述主机接收报文时间的第二关系式;
20、利用所述第一关系式和所述第二关系式,构建关于所述时钟偏移量的第一表达式和关于所述主机与所述传感器之间的通信延迟时间的第二表达式;
21、求解所述第一表达式,得到所述时钟偏移量;
22、求解所述第二表达式,得到所述通信延迟时间。
23、作为上述方案的改进,所述根据系统调度过程中的延迟噪声、传感器数据传输过程中的延迟噪声和所述补偿后的传感器数据发送时间,确定滤波加权因子,包括:
24、根据pi'+1=pi+q,预测下一时刻的期望抖动方差;其中,pi'+1表示i+1时刻的期望抖动方差,pi表示i时刻的抖动方差,q表示系统调度过程中的延迟噪声的方差;
25、根据计算滤波加权因子;其中,k表示滤波加权因子,pi'+1表示i+1时刻的期望抖动方差,r表示传感器数据传输过程中的延迟噪声的方差。
26、作为上述方案的改进,所述通过所述滤波加权因子对所述补偿后的传感器数据发送时间进行滤波,得到滤波后的传感器数据发送时间,包括:
27、根据ti'+1=ti+δt,预测下一时刻的传感器数据发送时间;其中,ti'+1表示i+1时刻的传感器数据发送时间,ti表示i时刻的传感器数据发送时间,δt表示传感器数据发送周期;
28、根据ti+1=ti'+1+ky,计算滤波后的传感器数据发送时间;其中,ti+1表示i时刻的传感器数据发送时间,ti'+1表示i+1时刻的传感器数据发送时间,k表示滤波加权因子,y=ti+1-ti'+1。
29、为实现上述目的,本发明实施例还提供了一种多传感器时间同步装置,包括:
30、传感器数据接收时间获取模块,用于获取传感器数据接收时间;其中,所述传感器数据接收时间为主机接收到传感器发送来的传感器数据的时间;
31、传感器数据发送时间补偿模块,用于根据所述传感器数据接收时间,对传感器数据发送时间进行补偿,得到补偿后的传感器数据发送时间;其中,所述传感器数据发送时间为所述传感器向所述主机发送所述传感器数据时的时间;
32、传感器数据发送时间滤波模块,对所述补偿后的传感器数据发送时间进行滤波,得到滤波后的传感器数据发送时间。
33、作为上述方案的改进,所述根据所述传感器数据接收时间,对传感器数据发送时间进行补偿,得到补偿后的传感器数据发送时间,包括:
34、通过所述主机与所述传感器之间的数据交互获取所述主机与所述传感器之间的时钟偏移量和通信延迟时间;
35、根据下式,对传感器数据发送时间进行补偿,得到补偿后的传感器数据发送时间:
36、t=trcv-tshift-d
37、其中,trcv表示传感器数据接收时间,tshift表示时钟偏移量,d表示通信延迟时间。
38、为实现上述目的,本发明实施例还提供了一种电子设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器在执行所述计算机程序时实现如上述的多传感器时间同步方法。
39、为实现上述目的,本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序;其中,所述计算机程序在运行时控制所述计算机可读存储介质所在的设备执行如上述的多传感器时间同步方法。
40、与现有技术相比,本发明实施例提供的一种多传感器时间同步方法、装置、设备及存储介质,通过获取传感器数据接收时间;根据所述传感器数据接收时间,对传感器数据发送时间进行补偿,得到补偿后的传感器数据发送时间;对所述补偿后的传感器数据发送时间进行滤波,得到滤波后的传感器数据发送时间。由此可见,本发明实施例通过结合实际的传感器数据接收时间、系统调度过程中的延迟噪声、传感器数据传输过程中的延迟噪声确定出滤波加权因子k,进而通过加权平均计算出最终的传感器数据发送时间,达到高精度时间同步的目的。
- 还没有人留言评论。精彩留言会获得点赞!