一种可进行二维或三维兼容成像的像素结构及成像方法
本发明属于半导体光电探测器,尤其是一种可进行二维或三维兼容成像的像素结构及成像方法。
背景技术:
1、当前图像传感器主要有ccd和cmos两种,早期由于工艺水平的限制,cmos图像传感器存在噪声高、感光度低等问题,而相对于cmos图像传感器较晚发明的ccd图像传感器开始迅速发展并普遍应用于军用、航空航天、民用与工业等各个领域。但随着cmos工艺的进步,cmos图像传感器凭借其低功耗、低成本、高集成度、抗辐射干扰性强等优点,于九十年代开始迅猛发展,并现已基本达到了ccd图像传感器的特性水平。
2、与ccd的mos电容结构不同,当前常见的cmos图像传感器很多都依靠光电二极管进行光电转换以及电荷收集,分为无源和有源两种。但无源像素性能较差,真正应用研究中少有大的突破,所以,有源像素的出现凭借其优越性很快取代了无源像素结构。目前二维成像领域常用的有源像素主要为单存储节点结构。二维成像通常采用的像素结构为4t(单节点)结构,它是由4个晶体管组成的。这些晶体管包括像素电荷传输晶体管,复位晶体管,选择晶体管和源极跟随器,其中电荷传输晶体管用于将光生电荷从感光区转移至电荷存储节点,复位晶体管用于对存储节点和感光区进行复位,源极跟随器与外加偏置结合,用以缓冲电荷存储节点电压,将电荷信息转换成电压输出,选择晶体管用于将光信号输出到列总线上。
3、现阶段3d成像领域主要有以下三条技术路线,分别为双目立体视觉、结构光和飞行时间法,飞行时间法又分为直接式飞行时间法和间接式飞行时间法。其中间接式飞行时间法(i-tof)具有探测距离适中、抗强光性能好,精度良好、功耗较低、系统集成度高以及成本低等优点,受到了许多高校和研发公司的青睐。
4、飞行时间法通过测量调制光波在被测物体和图像传感器之间往返的时间间隔计算出待测距离的一种测距方法,间接式飞行时间无法通过检测发射光和反射光之间的相位变化来反映调制光的飞行时间,进而实现距离测量。
5、间接式飞行时间法需要采集像素内部传输管与发射光的相位差为0°、90°、180°、270°时的光生电荷。由于单节点结构像素只有一个读出节点,在一个时钟周期内,只能采样一个相位的电荷,因此需要四帧时间才能解算出待测物体的距离,对于运动中的物体容易产生运动伪影,影响测量精度。四节点结构像素相当于4个单节点结构像素共用一个感光区,包含四个读出节点,其中每个节点都能存储一个相位的信号电荷,因此一个时钟周期内就可以对四个采样点进行采样,该结构距离结算速度快,不易受物体运动的影响,但由于存储节点过多,像素的感光面积受到限制,造成像素填充率低,严重影响图像传感器的成像质量。双节点结构像素相当于2个单节点结构像素共用一个感光区,包含两个读出节点,需要两帧时间即可解算出待测物体距离,同时相较四节点结构也大大提高了像素的填充率,提高了成像质量。因此双节点结构成为i-tof图像传感器中最常用的像素结构。
6、然而对于二/三维兼容的图像传感器,在测量二维图像时,双节点结构像素往往只能启用一个存储节点,作为单节点像素使用,从而使得像素内大量电路闲置,造成了芯片面积的浪费。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提出一种可进行二维或三维兼容成像的像素结构及成像方法,通过控制mos管开关的通断实现像素在单节点结构和双节点结构之间的转换,以解决双节点结构像素在进行二维成像时大量电路闲置的问题,同时增加在二维模式下的横向分辨率。
2、本发明解决其技术问题是采取以下技术方案实现的:
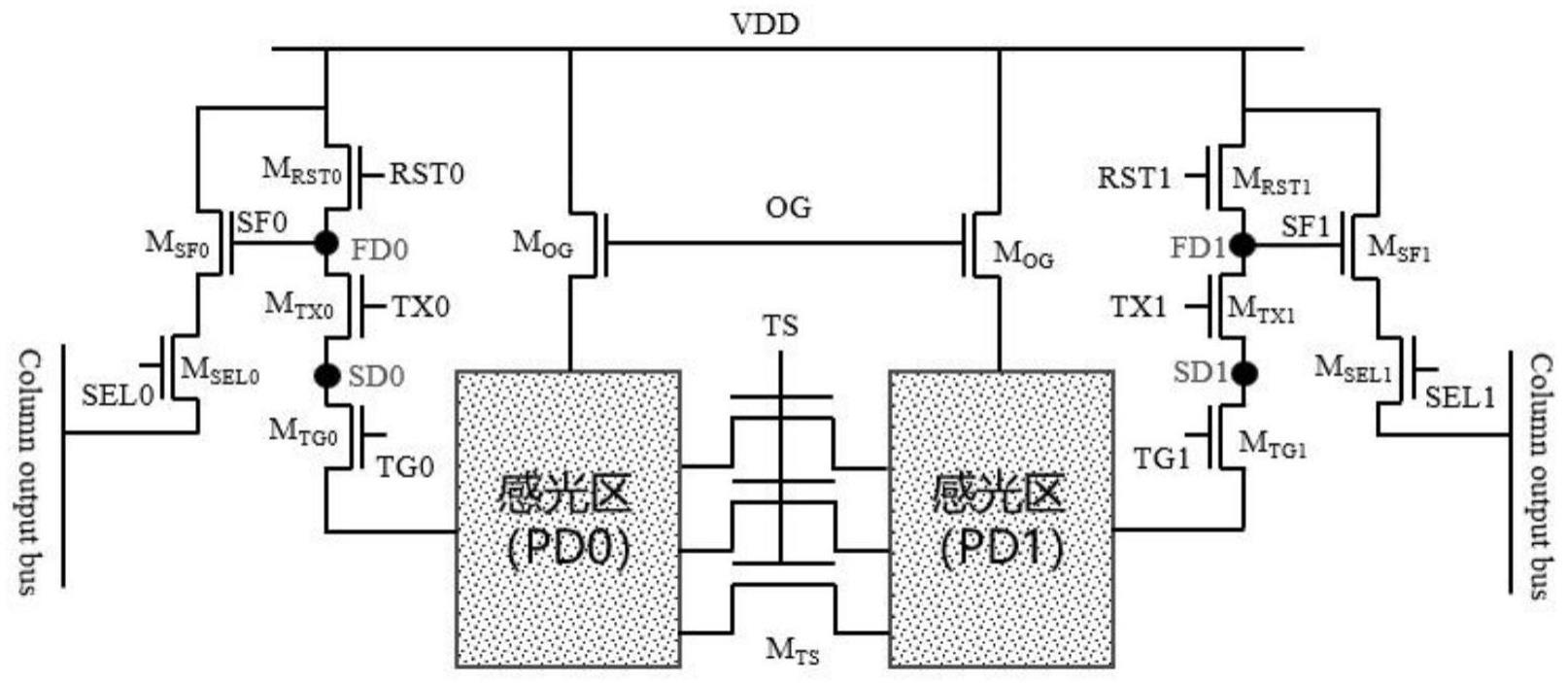
3、一种可进行二维或三维兼容成像的像素结构,包括感光区pd0、感光区pd1、复位开关mrst0、复位开关mrst1、全局复位开关mog、传输管mtg0、传输管mtg1、传输管mtx0、传输管mtx1、源极跟随器msf0、源极跟随器msf1、选通管msel0、选通管msel1、感光区内部开关mts;
4、选通管msel0的栅极输入信号sel0,选通管msel0的一端连接源极跟随器msf0的一端,源极跟随器msf0的另一端连接电源vdd,源极跟随器msf0的栅极连接存储节点fd0,fd0连接复位开关mrst0的一端,复位开关mrst0的另一端连接电源vdd,复位开关mrst0的栅极输入信号rst0,fd0连接传输管mtx0的一端,传输管mtx0的另一端连接存储节点sd0,传输管mtx0的栅极输入信号tx0,存储节点sd0连接传输管mtg0的一端,传输管mtg0的另一端连接感光区pd0,感光区pd0连接全局复位开关mog的一端,全局复位开关mog的另一端连接电源vdd,
5、选通管msel1的栅极输入信号sel1,选通管msel1的一端连接源极跟随器msf1的一端,源极跟随器msf1的另一端连接电源vdd,源极跟随器msf1的栅极连接存储节点fd1,fd0连接复位开关mrst1的一端,复位开关mrst1的另一端连接电源vdd,复位开关mrst1的栅极输入信号rst1,fd1连接传输管mtx1的一端,传输管mtx1的另一端连接存储节点sd1,传输管mtx1的栅极输入信号tx1,存储节点sd1连接传输管mtg1的一端,传输管mtg1的另一端连接感光区pd1,感光区pd1连接全局复位开关mog的一端,全局复位开关mog的另一端连接电源vdd,感光区pd0和感光区pd1通过感光区内部开关mts连接,感光区内部开关mts栅极的输入为信号ts。
6、一种可进行二维或三维兼容成像的像素结构的成像方法,包括二维成像方法和三维成像方法。
7、而且,所述二维成像方法包括以下步骤:
8、步骤1.1、整个成像过程中信号ts始终置零使感光区内部开关mts保持关断,曝光开始前,将信号rst0、信号rst1、信号tx0、信号tx1、信号tg0和信号tg1置1,开启复位开关mrst0、复位开关mrst1、传输管mtx0、传输管mtx1、传输管mtg0和传输管mtg1,使存储节点sd0、存储节点sd1、存储节点pd0和存储节点pd1复位,复位时间为t0;
9、步骤1.2、曝光时间t1期间,信号rst0、信号rst1、信号tx0、信号tx1、信号tg0和信号tg1置零,关断复位开关mrst0、复位开关mrst1、传输管mtx0、传输管mtx1、传输管mtg0和传输管mtg1,信号tg0和信号tg1始终置1,使传输管mtg0和传输管mtg1导通,及时将存储节点pd0和存储节点pd1中光生电荷转移至存储节点sd0和存储节点sd1;
10、步骤1.3、曝光结束后,信号rst0、信号sel0、信号rst1和信号sel1置1使复位开关mrst0、传输管msel0、复位开关mrst1和传输管msel1导通,对存储节点fd0进行复位并读取复位信号,复位时间为t2,复位完成后,信号rst0和信号rst1置零关断复位开关mrst0和复位开关mrst1,信号tx0和信号tx1置1,开启传输管mtx0和传输管mtx1,将积分电荷由存储节点sd0和存储节点sd1分别转移至存储节点fd0和存储节点fd1节点,转移时间为t3,进行光信号的读取,完成双采样操作,整个读出时间为t4。
11、而且,所述三维成像方法包括以下步骤:
12、步骤2.1、曝光开始前,信号ts置0,感光区内部开关mts关断,将信号rst0、信号rst1、信号tx0、信号tx1、信号tg0和信号tg1置1,开启复位开关mrst0、复位开关mrst1、传输管mtx0、传输管mtx1、传输管mtg0和传输管mtg1,对感光区pd0和感光区pd1进行复位,复位时间为t5;
13、步骤2.2、曝光期间,信号ts置1使传输管mts导通,传输管mtg0和传输管mtg1管接频率相同、相位相差180°的调制信号,利用调制信号在0、1之间变化控制传输管mtg0和传输管mtg1的通断将存储节点fd0和存储节点fd1内的调制光积分信号转移至对应的存储节点sd0和存储节点sd1节点,其中,第一帧信号tg0和信号tg1分别接初始相位为0°和180°的调制信号,第二帧信号tg0和信号tg1分别接初始相位为90°和270°的调制信号,曝光时间为t6;
14、步骤2.3、曝光结束后,信号og置一使传输管mog导通对光电二极管进行全局复位,信号tg0和信号tg1置零使传输管mtg0和传输管mtg1保持关闭,信号rst0、信号sel0、信号rst1和信号sel1置一使复位开关mrst0、传输管msel0、复位开关mrst1和传输管msel1导通,对存储节点fd0和存储节点fd1进行复位并读取复位信号,复位时间为t7,复位完成后,信号rst0和信号rst1置零关断复位开关mrst0和复位开关mrst1,信号tx0和信号tx1置一开启传输管mtx0和传输管mtx1将积分电荷由存储节点sd0和存储节点sd1转移至存储节点fd0和存储节点fd1节点,转移时间为t8,读取光信号,进行双采样操作,整个读出时间为t9。
15、本发明的优点和积极效果是:
16、本发明构建了可进行二维或三维兼容成像的像素结构,将两个像素的感光二极管之间,通过控制mos管开关的通断实现像素在单节点结构和双节点结构之间的转换,以解决双节点结构像素在进行二维成像时大量电路闲置的问题,同时增加在二维模式下的横向分辨率。同时本发明通过在二维模式下将双节点结构像素分成两个单独的单节点结构像素,充分利用像素内部电路,同时又大大提高了二维模式下图像传感器的分辨率。
- 还没有人留言评论。精彩留言会获得点赞!