一种虚拟空间的评论数据处理方法、装置及电子设备与流程
本公开属于计算机信息处理,具体涉及一种虚拟空间的评论数据处理方法、装置及电子设备。
背景技术:
1、传统意义上的弹幕系统是指观看视频时候弹出的评论性字幕。虽然不同弹幕的发送时间有所区别,但是其只会在视频中特定的一个时间点出现。因此在相同时刻发送的弹幕基本上也具有相同的主题,在参与评论时就会有与其他观众同时评论的错觉。
2、对于元宇宙场景,目前仅有的评价系统是对整个目标场景或场景中的道具而言,用户无法做到随心所欲的对场景中的任何事物进行评论;由于3d(3-dimension,三维)空间没有时间维度,标准弹幕系统无法引入,无法产生精准的画面定位,整体场景评价功能同样也无法聚焦到具体的场景。
技术实现思路
1、本公开实施例的目的是提供一种虚拟空间的评论数据处理方法、装置及电子设备,解决了无法在3d空间内引入评论数据或标准弹幕系统的问题。
2、第一方面,本公开实施例提供了一种虚拟空间的评论数据处理方法,该方法包括:
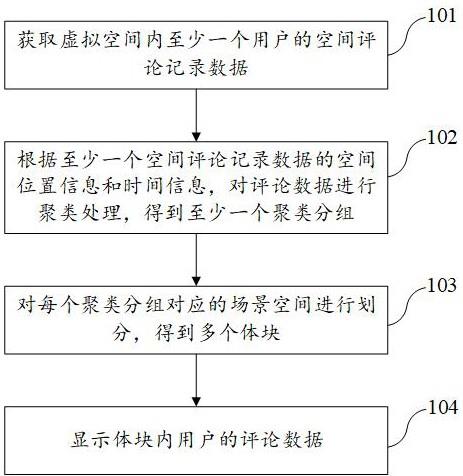
3、获取虚拟空间内至少一个用户的空间评论记录数据;空间评论记录数据包括用户发送的评论数据、评论数据的时间信息以及发送评论数据时用户在虚拟空间内的空间位置信息;空间位置信息包括发送评论数据时用户在虚拟空间中的坐标信息和用户镜头的朝向信息;
4、根据至少一个空间评论记录数据的空间位置信息和时间信息,对评论数据进行聚类处理,得到至少一个聚类分组;每个聚类分组分别对应一个场景空间;
5、对每个聚类分组对应的场景空间进行划分,得到多个体块;
6、显示体块内用户的评论数据。
7、可选地,根据至少一个空间评论记录数据的空间位置信息和时间信息,对评论数据进行聚类处理,包括:
8、获取预设时间段内的时间信息对应的至少一个目标用户的目标评论数据;
9、根据目标评论数据对应的空间位置信息,对至少一个目标评论数据进行聚类处理,得到至少一个聚类分组。
10、可选地,根据目标评论数据对应的空间位置信息,对至少一个目标评论数据进行聚类处理,得到至少一个聚类分组,包括:
11、确定至少一个簇中心;
12、基于每个目标评论数据的空间位置信息,确定每个目标评论数据到至少一个簇中心的最小距离;
13、按照每个目标评论数据的最小距离进行聚类处理,得到至少一个聚类分组。
14、可选地,簇中心的数量通过以下过程确定:
15、通过公式计算数量为k的簇中心的误差平方和;其中,r为误差平方和,ci为第i个簇中心,k为簇中心的数量,p是目标评论数据的空间位置,mi是所有目标评论数据的平均空间位置,表示距离;
16、当k个簇中心对应的误差平方和与个簇中心的误差平方和之间的变化量在预设变化范围内时,确定簇中心的数量为。
17、可选地,对每个聚类分组对应的场景空间进行划分,得到多个体块,包括:
18、获取场景空间的空间尺寸;
19、根据场景空间的空间尺寸和预设递归截至条件,对场景空间进行划分,得到虚拟空间的多个体块。
20、可选地,根据场景空间的空间尺寸和预设递归截至条件,对场景空间进行划分,得到虚拟空间的多个体块,包括:
21、基于每个场景空间的空间尺寸,对空间场景进行等量划分,得到n个等分空间;
22、对n个等分空间继续进行等量划分,直到满足预设递归截至条件,得到虚拟空间的多个体块;预设递归截至条件为每个等分空间内对应的目标评论数据的数量在预设数量范围内。
23、可选地,显示体块内用户的评论数据,包括:
24、按照用户在体块内的在虚拟空间中的当前坐标信息和当前用户镜头的朝向信息,在虚拟空间中以预设显示方式显示用户的评论数据。
25、第二方面,本公开实施例提供了一种虚拟空间的评论数据处理装置,包括:
26、获取模块,用于获取虚拟空间内至少一个用户的空间评论记录数据;空间评论记录数据包括用户发送的评论数据、评论数据的时间信息以及发送评论数据时用户在虚拟空间内的空间位置信息;空间位置信息包括发送评论数据时用户在虚拟空间中的坐标信息和用户镜头的朝向信息;
27、处理模块,用于根据至少一个空间评论记录数据的空间位置信息和时间信息,对评论数据进行聚类处理,得到至少一个聚类分组;每个聚类分组分别对应一个场景空间;对每个聚类分组对应的场景空间进行划分,得到多个体块;显示体块内用户的评论数据。
28、可选地,根据至少一个空间评论记录数据的空间位置信息和时间信息,对评论数据进行聚类处理,包括:
29、获取预设时间段内的时间信息对应的至少一个目标用户的目标评论数据;
30、根据目标评论数据对应的空间位置信息,对至少一个目标评论数据进行聚类处理,得到至少一个聚类分组。
31、可选地,根据目标评论数据对应的空间位置信息,对至少一个目标评论数据进行聚类处理,得到至少一个聚类分组,包括:
32、确定至少一个簇中心;
33、基于每个目标评论数据的空间位置信息,确定每个目标评论数据到至少一个簇中心的最小距离;
34、按照每个目标评论数据的最小距离进行聚类处理,得到至少一个聚类分组。
35、可选地,簇中心的数量通过以下过程确定:
36、通过公式计算数量为k的簇中心的误差平方和;其中,r为误差平方和,ci为第i个簇中心,k为簇中心的数量,p是目标评论数据的空间位置,mi是所有目标评论数据的平均空间位置,表示距离;
37、当k个簇中心对应的误差平方和与个簇中心的误差平方和之间的变化量在预设变化范围内时,确定簇中心的数量为。
38、可选地,对每个聚类分组对应的场景空间进行划分,得到多个体块,包括:
39、获取场景空间的空间尺寸;
40、根据场景空间的空间尺寸和预设递归截至条件,对场景空间进行划分,得到虚拟空间的多个体块。
41、可选地,根据场景空间的空间尺寸和预设递归截至条件,对场景空间进行划分,得到虚拟空间的多个体块,包括:
42、基于每个场景空间的空间尺寸,对空间场景进行等量划分,得到n个等分空间;
43、对n个等分空间继续进行等量划分,直到满足预设递归截至条件,得到虚拟空间的多个体块;预设递归截至条件为每个等分空间内对应的目标评论数据的数量在预设数量范围内。
44、可选地,显示体块内用户的评论数据,包括:
45、按照用户在体块内的在虚拟空间中的当前坐标信息和当前用户镜头的朝向信息,在虚拟空间中以预设显示方式显示用户的评论数据。
46、第三方面,本公开实施例提供了一种电子设备,包括处理器,存储器及存储在存储器上并可在处理器上运行的程序或指令,程序或指令被处理器执行时实现如上述的虚拟空间的评论数据处理方法的步骤。
47、第四方面,本公开实施例提供了一种可读存储介质,可读存储介质上存储程序或指令,程序或指令被处理器执行时实现如上的虚拟空间的评论数据处理方法的步骤。
48、在本公开实施例中,通过获取虚拟空间内至少一个用户的空间评论记录数据;根据至少一个空间评论记录数据的空间位置信息和时间信息,对评论数据进行聚类处理,得到至少一个聚类分组;每个聚类分组分别对应一个场景空间;对每个聚类分组对应的场景空间进行划分,得到多个体块;显示体块内用户的评论数据。解决了无法在3d空间内引入评论数据或标准弹幕系统的问题,实现了在虚拟空间中对评论数据的精准定位,从而使得用户可以在元宇宙的虚拟空间中随心所欲地发送评论数据。
- 还没有人留言评论。精彩留言会获得点赞!