一种基于车载无人机下载的方法、系统及车载终端与流程
本发明属于汽车电子领域,更具体地,涉及一种基于车载无人机下载的方法、系统及车载终端。
背景技术:
1、随着软件定义汽车的发展,汽车逐步转变为一个智能化、可拓展、可持续迭代升级的车载终端,车载终端通过网络从云服务器远程下载软件包,然后对设备进行更新或升级。在网络不好的地方,导致车载终端无法更新或者无法上传本地资料的问题。
技术实现思路
1、为解决上述技术问题,本申请提供一种基于车载无人机下载的方法、系统及车载终端,解决在车辆运行过程中,在网络不好的地方,导致车载终端无法更新或者无法上传本地资料的问题。
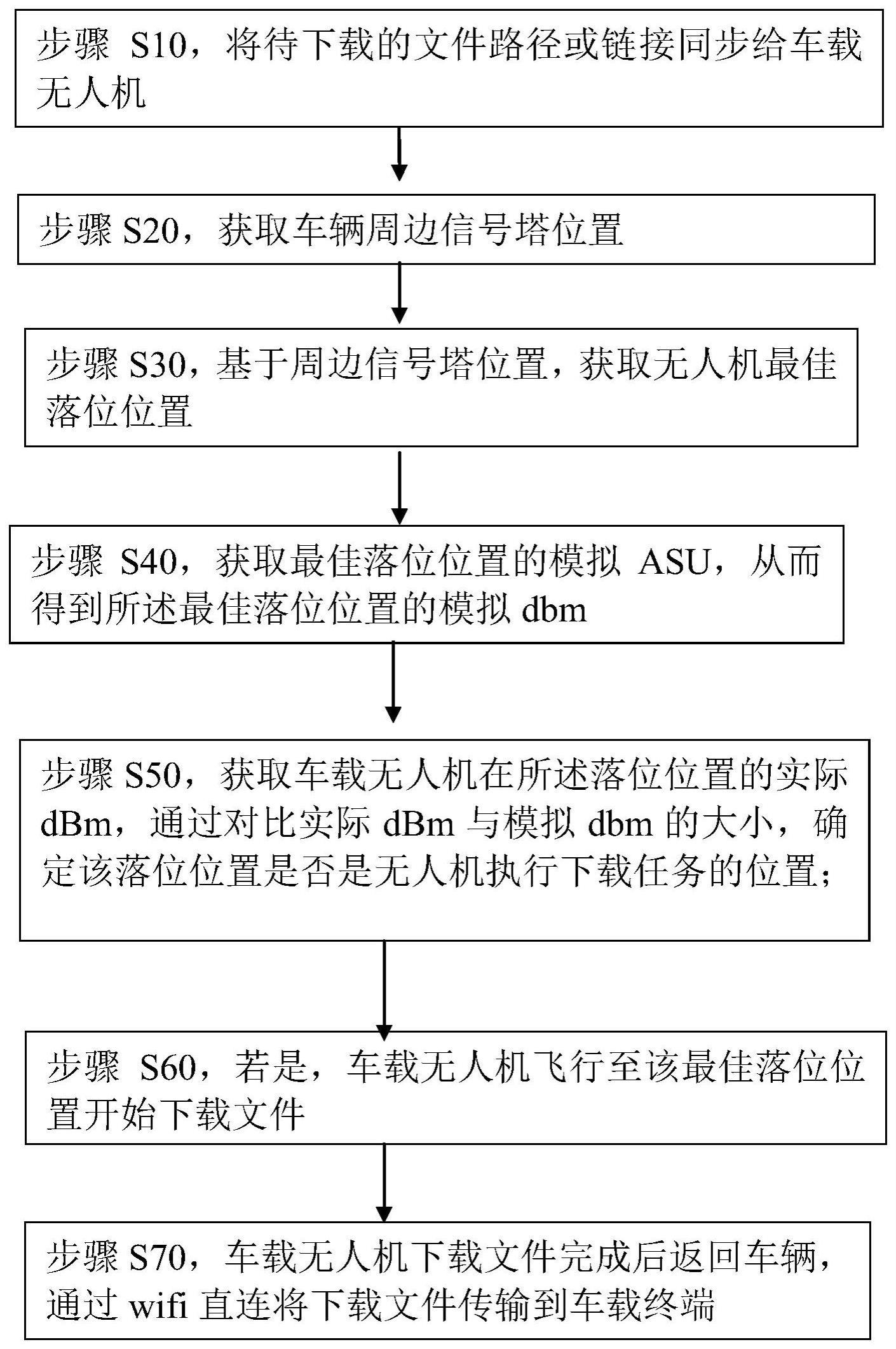
2、第一方面,本申请实施例提供的基于车载无人机下载的方法,包括:步骤s10,将待下载的文件路径或链接同步给车载无人机;
3、步骤s20,获取车辆周边信号塔位置;
4、步骤s30,基于周边信号塔位置,获取无人机最佳落位位置;
5、步骤s40,获取最佳落位位置的模拟asu,从而得到所述最佳落位位置的模拟dbm;
6、步骤s50,获取车载无人机在所述落位位置的实际dbm,通过对比实际dbm与模拟dbm的大小,确定该落位位置是否是无人机执行下载任务的位置;
7、步骤s60,若是,车载无人机飞行至该最佳落位位置开始下载文件;
8、步骤s70,车载无人机下载文件完成后返回车辆,通过wifi直连将下载文件传输到车载终端。
9、作为一种可能的实施方式,所述步骤s30进一步包括:
10、步骤s310,基于获取到的多个信号塔的位置,获取每一信号塔与该车辆的直线距离以及该车辆与所述信号塔的高度差;
11、步骤s320,计算车载无人机的飞行范围
12、步骤s330,基于车载无人机的飞行范围、车辆与信号塔的直线距离,车辆与信号塔的高度差,选择车载无人机的落位位置。
13、作为一种可能的实施方式,所述步骤s320进一步包括:所述飞行范围包括飞行范围1和飞行范围2,所述飞行范围1为以hlmax为高,以1为半径的圆柱体,飞行范围2是以h为高,以lhmax为半径的圆柱体,其中,h为车载无人机垂直最高飞行高度,1为车载无人机水平最远飞行距离,lhmax是以最高飞行高度水平飞行的最远距离,hlmax是以水平最远飞行距离可以飞行的最高高度。
14、作为一种可能的实施方式,所述步骤s330进一步包括:
15、步骤s330a,若判断车载无人机的飞行范围内是否有信号塔,若有信号塔,则该信号塔所在的位置为车载无人机的落位区域;
16、步骤s330b,若判断车载无人机的飞行范围内无信号塔,则计算并查找车辆与各个信号塔的绝对距离,找到距离车辆绝对距离最小的信号塔,该信号塔所在的位置为车载无人机的落位区域;
17、步骤s330c,基于所选择车载无人机的落位区域,选取车载无人机最佳落位位置。
18、作为一种可能的实施方式,所述车辆与信号塔的绝对距离根据车辆与信号塔的直线距离、车辆与信号塔的高度差计算、车载无人机水平飞行的最远距离计算得出。
19、作为一种可能的实施方式,所述车辆与信号塔的绝对距离的计算公式为:其中,δh1为车辆与信号塔的高度差,distance1为信号塔与车辆的直线距离,hlmax为以最高飞行高度水平飞行的最远距离。
20、作为一种可能的实施方式,步骤s330c进一步包括:在选取车载无人机最佳的落位位置时,满足如下条件:
21、车载无人机的飞行垂直高度h<车载无人机最大垂直高度,且需最接近信号塔的高度;
22、飞行水平距离l<车载无人机最大水平距离,且绝对距离之间的等高线数量越少。
23、作为一种可能的实施方式,所述步骤s50进一步包括:
24、步骤s50a,当车载无人机飞行至落位位置,与计算得到的模拟dbm和实际dbm比较,若实际dbm值小于等于模拟dbm,返回步骤s30重新确定落位位置;
25、步骤s50b,当车载无人机飞行至落位位置,与计算得到的模拟dbm和实际dbm比较,若实际dbm值大于模拟dbm,该落位位置为车载无人机执行下载任务的位置。
26、第二方面,本申请实施例提供的基于车载无人机下载的系统,包括
27、同步单元,用以将待下载的文件路径或链接同步给车载无人机;
28、计算单元,用以获取车辆周边信号塔位置,基于周边信号塔位置,获取无人机最佳落位位置;模拟信号强度获取单元,获取最佳落位位置的模拟asu,从而得到所述最佳落位位置的模拟dbm;
29、实际信号强度获取单元,获取车载无人机在所述落位位置的实际dbm;
30、判断单元,通过对比实际dbm与模拟dbm的大小,确定该落位位置是否是无人机执行下载任务的位置;
31、下载单元,用以控制车载无人机飞行至该最佳落位位置开始下载文件;车载无人机下载文件完成后返回车辆,通过wifi直连将下载文件传输到车载终端。
32、第二方面,本申请实施例提供的一种车载终端,用于控制车载无人机,其特征在于,包括一处理器,处理器以及
33、被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行所述权利要求1~8所述方法。
34、本申请的一种基于车载无人机下载的方法、系统及车载终端,在网络环境差的地方,车载终端控制车载无人机,利用无人机通过网络从云服务器远程下载软件包,然后对设备进行更新或升级,解决车载终端无法更新或者无法上传本地资料的问题。
技术特征:
1.一种基于车载无人机下载的方法,其特征在于,包括如下步骤:
2.如权利要求1所述的基于车载无人机下载的方法,其特征在于,所述步骤s30进一步包括:
3.如权利要求2所述的基于车载无人机下载的方法,其特征在于,所述步骤s320进一步包括:所述飞行范围包括飞行范围1和飞行范围2,所述飞行范围1为以hlmax为高,以l为半径的圆柱体,飞行范围2是以h为高,以lhmax为半径的圆柱体,其中,h为车载无人机垂直最高飞行高度,l为车载无人机水平最远飞行距离,lhmax是以最高飞行高度水平飞行的最远距离,hlmax是以水平最远飞行距离飞行的最高高度。
4.如权利要求2所述的基于车载无人机下载的方法,其特征在于,所述步骤s330进一步包括:
5.如权利要求4所述的基于车载无人机下载的方法,其特征在于,所述车辆与信号塔的绝对距离根据车辆与信号塔的直线距离、车辆与信号塔的高度差计算、车载无人机水平飞行的最远距离计算得出。
6.如权利要求5所述的基于车载无人机下载的方法,其特征在于,所述车辆与信号塔的绝对距离的计算公式为:其中,δh1为车辆与信号塔的高度差,distance1为信号塔与车辆的直线距离,hlmax为以最高飞行高度水平飞行的最远距离。
7.如权利要求4所述的基于车载无人机下载的方法,其特征在于,步骤s330c进一步包括:在选取车载无人机最佳的落位位置时,满足如下条件:
8.如权利要求1或4所述的基于车载无人机下载的方法,其特征在于,所述步骤s50进一步包括:
9.一种车载终端的升级系统,其特征在于,包括:
10.一种车载终端,用于控制车载无人机,其特征在于,包括一处理器,处理器以及
技术总结
本发明公开了一种基于车载无人机下载的方法、系统及车载终端,该方法包括将待下载的文件路径或链接同步给车载无人机;获取车辆周边信号塔位置;基于周边信号塔位置,获取无人机最佳落位位置;获取最佳落位位置的模拟ASU,从而得到所述最佳落位位置的模拟dbm;获取车载无人机在所述落位位置的实际dBm,通过对比实际dBm与模拟dbm的大小,确定该落位位置是否是无人机执行下载任务的位置;若是,车载无人机飞行至该最佳落位位置开始下载文件;车载无人机下载文件完成后返回车辆,通过wifi直连将下载文件传输到车载终端。本发明可解决在网络不好的地方,车载终端无法更新或者无法上传本地资料的问题。
技术研发人员:朱志胜,黄子剑,李晓伟,年宇鹏,陈文
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!