一种机载智能反射面辅助的信道建模方法及系统
本发明属于无线通信,尤其涉及一种机载智能反射面辅助的信道建模方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、随着人们对于移动通信要求的不断提高,新型通信技术得到了相应发展,其中,智能反射面辅助的通信技术被认为是未来6g移动通信的关键技术之一;智能反射面是由大量反射单元组成的平面阵列,其中每个反射单元都可以以编程的方式改变入射波的相位和/或振幅,生成指向特定目标的虚拟波束;这种能力使得智能反射面能够一定程度上控制无线传播环境。与此同时,由于高机动性和快速部署等特性,无人机通信在学术界和工业界引发了极大的关注;无人机可以轻松改变其飞行高度,躲避障碍物,并与地面节点建立视距链路。
3、智能反射面和无人机通信技术相结合已成为下一代通信系统的潜在候选方案,例如,当前的智能反射面大多部署在建筑物表面或室内墙面上,收发端需位于反射面一侧,即只能利用一半空间;通过将智能反射面安装在无人机等机载平台上,建立机载智能反射面通信系统,可以充分利用整个三维空间,形成360°全景信号反射,进而扩大覆盖范围并提高无线通信质量。
4、目前,学术界和工业界常用的信道模型,如3gpp tr38.901,imt-2020,winner+等均不支持智能反射面仿真;目前存在的智能反射面信道模型多将智能反射面部署在墙面或建筑物表面,无法充分利用三维空间;此外,机载智能反射面的信道特性与传统地面智能反射面的信道特性有着极大的不同,例如,机载智能反射面易受到风、大气湍流及螺旋桨旋转等影响而发生振动;其反射单元以其初始位置为中心发生微小位移,进而影响反射信号的相位对齐。
5、综上,受无人机不稳定性的影响,机载智能反射面辅助的信道特性以及系统性能不能得到有效保障。
技术实现思路
1、为克服上述现有技术的不足,本发明提供了一种机载智能反射面辅助的信道建模方法及系统,将无人机振动引发的智能反射面角度偏移建模为正弦过程,建立相应的信道模型,真实反映风、大气湍流、机械振动等对信道统计特性和信道容量的影响,应用于多种机载智能反射面辅助的通信场景,为下一代通信系统的研发、评估、部署提供参考。
2、为实现上述目的,本发明的一个或多个实施例提供了如下技术方案:
3、本发明第一方面提供了一种机载智能反射面辅助的信道建模方法。
4、一种机载智能反射面辅助的信道建模方法,包括:
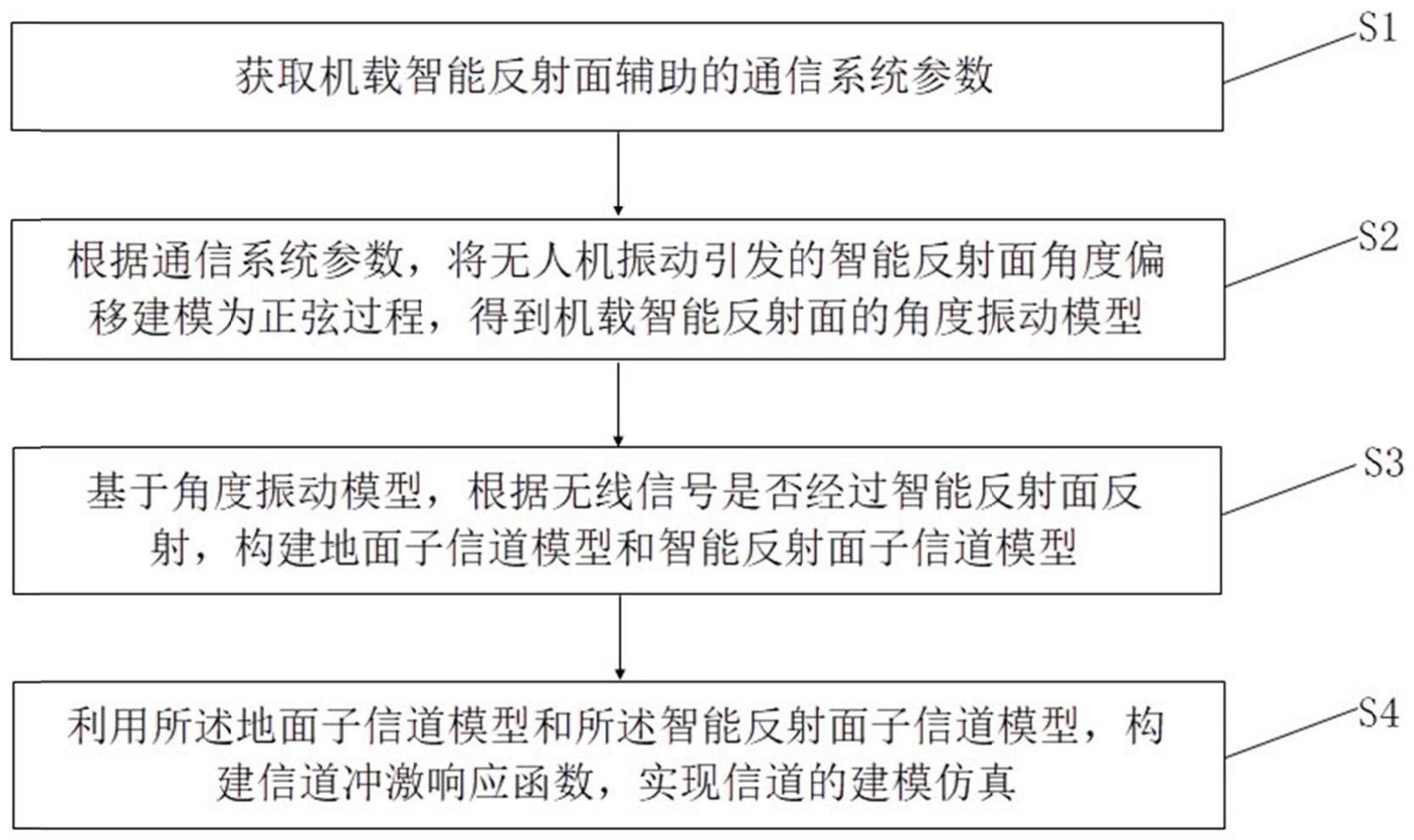
5、获取机载智能反射面辅助的通信系统参数;
6、根据通信系统参数,将无人机振动引发的智能反射面角度偏移建模为正弦过程,得到机载智能反射面的角度振动模型;
7、基于角度振动模型,根据无线信号是否经过智能反射面反射,构建地面子信道模型和智能反射面子信道模型;
8、利用所述地面子信道模型和所述智能反射面子信道模型,构建信道冲激响应函数,实现信道的建模仿真;
9、其中,所述地面子信道模型,对未经过智能反射面反射的信道,以发送端和接收端的位置为椭柱的两个焦点建立模型,并假设散射体分布在椭柱的表面;所述智能反射面子信道模型,对经过智能反射面反射的信道,将智能反射面建模为一个虚拟散射簇,其反射单元建模为簇中的散射体,通过微控制器配置反射单元的相移。
10、进一步的,所述角度振动模型,用于表示无人机受到风、大气湍流及螺旋桨旋转的影响,机载智能反射面的水平和俯仰角随时间t的变化,具体表示为:
11、ζa(t)=ζa(t0)+ξam·sin(2πfwt)
12、ζe(t)=ζe(t0)+ξem·sin(2πfwt)
13、其中,ζa(t0)和ζe(t0)分别表示初始时刻t0的智能反射面的水平角和俯仰角,ξam和ξem分别表示ζa(t)和ζe(t)的最大振幅,fw为水平角和俯仰角的振动频率。
14、进一步的,所述地面子信道模型和所述智能反射面子信道模型,都是由大尺度衰落和信道冲击响应组成;
15、其中,所述大尺度衰落,根据发送端到散射体及散射体到接收端之间的传输距离计算得到;
16、所述信道冲击响应,根据信号离开角和到达角计算多普勒频移,结合传输距离得到的。
17、进一步的,所述智能反射面子信道和地面子信道的大尺度衰落分别为:
18、
19、
20、其中,λ表示波长,k表示反射单元的总数,fc和c0分别表示载波频率和光速,nple表示路径损耗系数;ψk(t)表示经过第k个反射单元的相位,εpk表示从发射端到第k个反射单元之间的传输距离,εqk表示从第k个反射单元到接收端之间的传输距离。
21、进一步的,所述智能反射面子信道和地面子信道的信道冲击响应如下:
22、
23、
24、其中,m表示散射体总的数目,ψk(t)表示经过第k个反射单元的相位,νti、νir、νtr分别为由发送端、接收端及无人机的运动导致的多普勒频移,εpq,m表示从发射端到接收端经过第m个散射体的距离,有εpq,m=εpm+εmq,εpm表示从发射端到散射体之间的传输距离,εmq表示从散射体到接收端之间的传输距离。
25、进一步的,所述信道冲激响应函数由所述地面子信道模型和所述智能反射面子信道模型相加得到,表示为:
26、
27、其中,plris和hris,qp(t)分别为智能反射面子信道的大尺度衰落和信道冲击响应,plenv和henv,qp(t)分别为地面子信道的大尺度衰落和信道冲击响应。
28、进一步的,基于机载智能反射面辅助的信道模型,获得信道空时相关函数和信道容量;
29、其中,所述信道空时相关函数计算如下:
30、
31、
32、其中,e[·]表示统计平均;
33、基于时变的模型参数建立瞬时信道容量:
34、
35、其中,det(·)表示矩阵行列式,ρ表示平均信噪比,iq表示大小为q×q的单位矩阵,表示共轭转置。
36、本发明第二方面提供了一种机载智能反射面辅助的信道建模系统。
37、一种机载智能反射面辅助的信道建模系统,包括参数获取模块、角度建模模块、信道建模模块和函数构建模块:
38、参数获取模块,被配置为:获取机载智能反射面辅助的通信系统参数;
39、角度建模模块,被配置为:根据通信系统参数,将无人机振动引发的智能反射面角度偏移建模为正弦过程,得到机载智能反射面的角度振动模型;
40、信道建模模块,被配置为:基于角度振动模型,根据无线信号是否经过智能反射面反射,构建地面子信道模型和智能反射面子信道模型;
41、函数构建模块,被配置为:利用所述地面子信道模型和所述智能反射面子信道模型,构建信道冲激响应函数,实现信道的建模仿真;
42、其中,所述地面子信道模型,对未经过智能反射面反射的信道,以发送端和接收端的位置为椭柱的两个焦点建立模型,并假设散射体分布在椭柱的表面;所述智能反射面子信道模型,对经过智能反射面反射的信道,将智能反射面建模为一个虚拟散射簇,其反射单元建模为簇中的散射体,通过微控制器配置反射单元的相移。
43、本发明第三方面提供了计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现如本发明第一方面所述的一种机载智能反射面辅助的信道建模方法中的步骤。
44、本发明第四方面提供了电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本发明第一方面所述的一种机载智能反射面辅助的信道建模方法中的步骤。
45、以上一个或多个技术方案存在以下有益效果:
46、本发明所述方案弥补了当前智能反射面信道建模的不足,通过使用无人机等空中平台搭载智能反射面,形成360°全景信号反射;与现存的部署在地面的智能反射面相比,可以充分利用三维空间,进而扩大信号覆盖范围并提高无线通信质量。
47、本发明所述方案通过引入正弦过程来模拟由风、大气湍流、螺旋桨旋转导致的智能反射面角度变化,建立信道模型,可准确模拟无人机的振动对信道统计特性的影响,为建立更加精确的机载智能反射面辅助的通信系统的设计、性能评估提供帮助。
48、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!