一种高精度对时方法、系统、设备及可读存储介质与流程
本技术涉及电力系统继电保护,特别涉及一种高精度对时方法、系统、设备及可读存储介质。
背景技术:
1、当前,对于ftu(feederterminalunit,馈线终端)、集中式dtu(distributionterminalunit,站所终端)、分散式dtu、智能融合终端以及海量低压发电、供电和用电等电力系统配电终端均需要支持北斗/gps(globalpositioningsystem,全球定位系统)对时功能,且要求性能上满足北斗/gps对时误差不大于5ms的要求。而在现有电力系统中,往往将对时误差控制在2ms以内。
2、不过,目前的电力系统设备通常要求具备高度数字化、智慧化和网络化,以实现对海量分散的发电、供电以及用电对象的智能协调控制和源网荷储各要素的友好协同;同时,还将通过网荷实时互动控制技术,来解决因分布式电源大量接入所造成的配电网惯量延时机制不足的问题,进而实现充电设施毫秒级快速惯量支撑和阻尼自适应调节,以减小充电设施对电网的冲击,辅助电网故障穿越。由此可见,在此背景下,需要对时误差不大于1ms甚至达到微秒级误差。
3、虽然北斗/gps对时定位模块的授时精度小于30ns,但是由于电力系统配电终端在接收到北斗/gps对时定位模块时间数据后,还需要对其进行处理和存储,并且电力系统配电终端需要统筹电类数据和非电类数据的感知采集、处理、计算、网络通道和安全防护等,以致配电终端在接收和解析秒脉冲和带有utc(coordinateduniversaltime,协调世界时)的rmc(recommendedminimumspecificgps/transit data,推荐定位信息)报文时存在以下几个不确定因素:配电终端接收rmc报文的时刻不确定以及接收到rmc报文时刻与识别到秒脉冲时刻的相对时间不确定,进而导致配电终端中的北斗/gps对时误差无法达到1ms的要求。
技术实现思路
1、本技术提供一种高精度对时方法、系统、设备及可读存储介质,以解决相关技术中配电终端中的北斗/gps对时误差无法达到1ms要求的问题。
2、第一方面,提供了一种高精度对时方法,所述方法应用于包括精准计时子模块、脉冲识别子模块以及数据处理子模块的cpu模块,所述方法包括以下步骤:
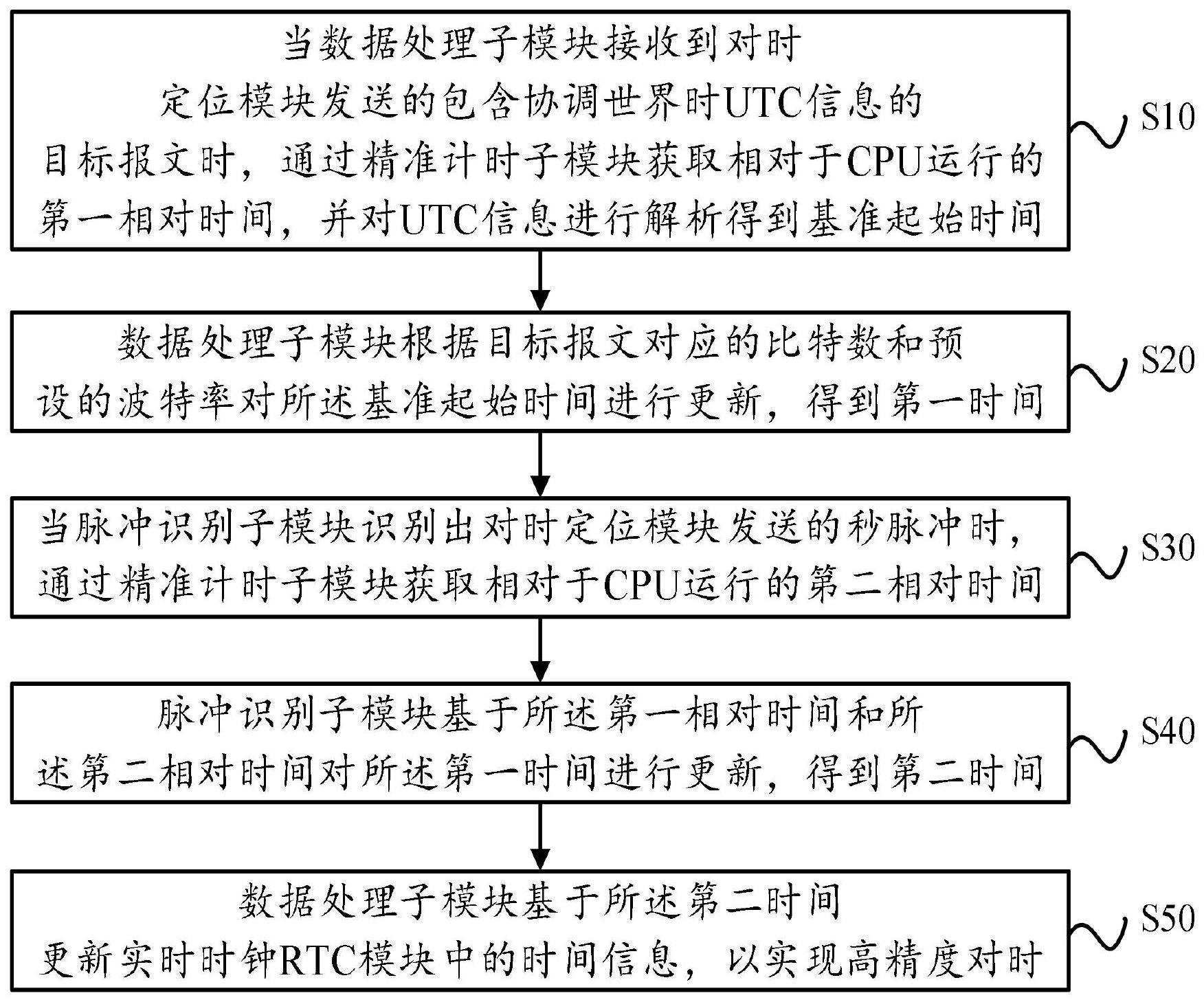
3、当数据处理子模块接收到对时定位模块发送的包含协调世界时utc信息的目标报文时,通过精准计时子模块获取相对于cpu运行的第一相对时间,并对utc信息进行解析得到基准起始时间;
4、数据处理子模块根据目标报文对应的比特数和预设的波特率对所述基准起始时间进行更新,得到第一时间;
5、当脉冲识别子模块识别出对时定位模块发送的秒脉冲时,通过精准计时子模块获取相对于cpu运行的第二相对时间;
6、脉冲识别子模块基于所述第一相对时间和所述第二相对时间对所述第一时间进行更新,得到第二时间;
7、数据处理子模块基于所述第二时间更新实时时钟rtc模块中的时间信息,以实现高精度对时。
8、一些实施例中,所述脉冲识别子模块基于所述第一相对时间和所述第二相对时间对所述第一时间进行更新,得到第二时间,包括:
9、计算所述第一相对时间和所述第二相对时间的时间差值;
10、对所述时间差值进行秒级的化整处理,得到处理后的时间差值;
11、基于所述处理后的时间差值对所述第一时间进行更新,得到第二时间。
12、一些实施例中,所述数据处理子模块基于所述第二时间更新rtc模块中的时间信息,包括:
13、当数据处理子模块接收到脉冲识别子模块发送的脉冲识别成功信号时,通过精准计时子模块获取相对于cpu运行的第三相对时间;
14、根据第二时间中的秒级时间、所述第二相对时间和所述第三相对时间确定出秒级量纲时间,并根据所述秒级量纲时间构建定时器;
15、对所述秒级量纲时间进行秒级的化整处理,得到处理后的秒级时间;
16、通过所述处理后的秒级时间对第二时间进行更新,得到第三时间;
17、当定时器计时结束后,将所述第三时间写入rtc模块,以实现rtc模块中时间信息的更新。
18、一些实施例中,所述根据所述秒级量纲时间构建定时器,包括:
19、通过预设的时间参数对所述秒级量纲时间进行取余处理,得到时间余数,所述时间参数基于系统的运行周期确定;
20、根据预设定值与时间余数间的差值构建定时器,所述差值用于表征当前时间到相邻下一秒所剩余的毫秒时间。
21、一些实施例中,所述数据处理子模块根据目标报文对应的比特数和预设的波特率对所述基准起始时间进行更新,得到第一时间,包括:
22、将基准起始时间、目标报文的报文长度、通用异步收发传输器uart报文中每个数据对应的预设比特数以及预设的波特率代入以下计算公式,得到第一时间:
23、t′=t+(len×b)baudrate
24、式中,t′表示第一时间,t表示基准起始时间,len表示目标报文的报文长度,b表示通用异步收发传输器uart报文中每个数据对应的预设比特数,(len×b)表示目标报文对应的比特数,baudrate表示波特率。
25、第二方面,提供了一种高精度对时系统,所述系统包括对时定位模块和rtc模块,还包括cpu模块,所述cpu模块包括精准计时子模块、脉冲识别子模块以及数据处理子模块;
26、所述数据处理子模块用于当接收到对时定位模块发送的包含协调世界时utc信息的目标报文时,通过精准计时子模块获取相对于cpu运行的第一相对时间,并对utc信息进行解析得到基准起始时间,根据目标报文对应的比特数和预设的波特率对所述基准起始时间进行更新,得到第一时间;
27、所述脉冲识别子模块用于当识别出对时定位模块发送的秒脉冲时,通过精准计时子模块获取相对于cpu运行的第二相对时间,基于所述第一相对时间和所述第二相对时间对所述第一时间进行更新,得到第二时间;
28、所述数据处理子模块还用于基于所述第二时间更新实时时钟rtc模块中的时间信息,以实现高精度对时。
29、一些实施例中,所述脉冲识别子模块具体用于:
30、计算所述第一相对时间和所述第二相对时间的时间差值;
31、对所述时间差值进行秒级的化整处理,得到处理后的时间差值;
32、基于所述处理后的时间差值对所述第一时间进行更新,得到第二时间。
33、一些实施例中,所述数据处理子模块具体用于:
34、当接收到脉冲识别子模块发送的脉冲识别成功信号时,通过精准计时子模块获取相对于cpu运行的第三相对时间;
35、根据第二时间中的秒级时间、所述第二相对时间和所述第三相对时间确定出秒级量纲时间,并根据所述秒级量纲时间构建定时器;
36、对所述秒级量纲时间进行秒级的化整处理,得到处理后的秒级时间;
37、通过所述处理后的秒级时间对第二时间进行更新,得到第三时间;
38、当定时器计时结束后,将所述第三时间写入rtc模块,以实现rtc模块中时间信息的更新。
39、第三方面,提供了一种高精度对时设备,包括:存储器和处理器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行,以实现前述的高精度对时方法。
40、第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,当所述计算机指令被计算机执行时,使得所述计算机执行前述的高精度对时方法。
41、本技术提供了一种高精度对时方法、系统、设备及可读存储介质,该方法应用于包括精准计时子模块、脉冲识别子模块以及数据处理子模块的cpu模块,包括:当数据处理子模块接收到对时定位模块发送的包含协调世界时utc信息的目标报文时,通过精准计时子模块获取相对于cpu运行的第一相对时间,并对utc信息进行解析得到基准起始时间;数据处理子模块根据目标报文对应的比特数和预设的波特率对所述基准起始时间进行更新,得到第一时间;当脉冲识别子模块识别出对时定位模块发送的秒脉冲时,通过精准计时子模块获取相对于cpu运行的第二相对时间;脉冲识别子模块基于所述第一相对时间和所述第二相对时间对所述第一时间进行更新,得到第二时间;数据处理子模块基于所述第二时间更新实时时钟rtc模块中的时间信息,以实现高精度对时。通过本技术,可以有效确定出接收带有utc的报文的时间以及接收到带有utc的rmc报文的时刻与识别到秒脉冲的时刻间的相对时间,进而有效提升对时精度,以确保配电终端中的北斗/gps对时误差满足1ms的要求。
- 还没有人留言评论。精彩留言会获得点赞!